一种声呐测量系统及三维成像声呐水下检测方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及声呐测量技术领域,具体涉及一种声呐测量系统及三维成像声呐水下检测方法。
背景技术
我国幅员辽阔,河流众多,海域宽广。受台风、洪水和地震等自然灾害的影响,水工建筑物毁损严重,堤防决口、水库出险频频发生,为确保国民经济和人民生命财产安全,需要及时对隐患处的水下细部结构进行快速检测,以利制定抢险和治理方案。水下声呐成像是目前对水工建筑物或水下细部结构的检测的技术手段,可以提供水下目标外形轮廓的细节描述,从而可以对目标进一步的跟踪和识别。
当前三维全景成像声呐通常采用三脚支架进行安装,由于三维全景成像声呐安装在三脚支架上后需要调节其高度和开角,高度太高会使盲区变大,开角太大会造成干扰,开角太小容易失稳,而三维声呐和安装平台的总质量约为15kg,远大于支架重量,所以在水下作业时重心偏高,抗水流能力差,设备非常容易发生滑动、失稳甚至被冲倒。
有专利号为ZL202121544873.0(授权公告号为CN215728827U)的中国实用新型《一种用于增强三维声呐稳定性的支架》披露了一种用于供声呐安装的支架,该支架为三脚支架。该支架包含支杆、脚管、底座、吊臂、声呐固定平台、连接杆;脚管设置三根,构成三脚支架的三个支脚,每根脚管的底部分别设有一个底座;连接杆也设置三根,每根的两端分别连接相邻的两根脚管的中部;声呐固定平台设置在脚管的顶部并与脚管固定,吊臂的一端与声呐固定座的底部连接;支杆竖直向下设置并与声呐固定平台垂直,支杆的顶端与声呐固定平台连接,支杆的底端安装配重块。该支架虽然能利用三脚支架及其增加的配重结构,使设备整体重心下移,加大三脚架与水底的摩擦力,在水下作业时更加稳定,不易发生滑动、倾斜和冲倒;但由于该三脚支架的每个脚管均与声呐固定平台固定,同时每根连接杆也固定连接在相邻的两根脚管的中部,故上述三脚支架的开角以及布置高度已经固定,故该三脚支架并不适用于不同的三维全景成像需求,同时该三脚支架只适合于平面放置,当支架的安装平面地形坡度较大时,则该三脚支架很难稳固布置。因此需要对现有技术作进一步改进。
发明内容
本发明所要解决的第一个技术问题是针对上述现有技术,而提供一种在保证安装稳定性时,还能满足不同三维成像需求的声呐测量系统。
本发明所要解决的第二个技术问题是针对上述现有技术,而提供应用有上述声呐测量系统的三维成像声呐水下检测方法,能适用于大坡比地形时的三维成像。
本发明所要解决的第三个技术问题是在保证声呐安装稳固的情况下,也能获得更好视野的三维成像声呐水下检测方法。
本发明解决上述第一个技术问题所采用的技术方案为:一种声呐测量系统,包括声呐和支架;其中支架包括:
安装平台,用于供声呐安装;
至少三根支撑杆,每根支撑杆均具有能约束在所述安装平台底部的第一端;
连接杆,数量与支撑杆的数量相对应,每根连接杆对应连接相邻的两根支撑杆;
其特征在于:每根支撑杆的第一端均以能相对所述安装平台转动的方式约束在所述安装平台上,每根连接杆均以能独立地沿着与其相连的支撑杆的长度方向上下移动的方式约束在支撑杆上。
为增强支架的稳定能力,每个支撑杆均具有第二端,每个支撑杆的第二端还转动连接有底座,所述底座的底部设有尖端。
为实现支撑杆和连接杆的调整,优选地,每根支撑杆的第一端与所述安装平台相铰接,和/或连接杆与支撑杆相铰接,和/或每根支撑杆的第二端与底座相铰接。
优选地,所述支撑杆为三根。
本发明解决上述第二个技术问题所采用的技术方案为:一种应用有上述声呐测量系统的三维成像声呐水下检测方法,其特征在于包括如下步骤:
步骤1、获取水下地形的坡度;
步骤2、根据步骤1中水下地形的坡度,按照最不利因素原则假定边界条件,对支架进行力学分析和稳定性计算;
步骤3、根据步骤2中的计算结果,锁定连接杆与支撑杆位置,并组装安装平台,之后在安装平台上安装声呐,并将声呐与远程的控制端相连接;
步骤4、将声呐测量系统放入水下,直至达到水下地形的坡面上时,在声呐测量系统放置稳定后,即启动声呐进行水下检测工作。
进一步地,将水下地形的坡面记为直线GF,水下地形的水平面记为直线GK,水下地形的坡面与水平面的交点为点G,从声呐的最高点D作垂直于直线GK的直线DL,点L为直线GK上的一点,所述步骤2中边界条件为:
GL>0并且0°<∠DGK<90°
其中,GL为点G和点L之间的距离,∠DGK为直线DG和直线GK之间的角度,
声呐在安装平台上的点H与点D组成的线段DH,将线段DH作垂直于直线GF的线段,得到线段DO,其中点O为线段DH与直线GF的交点,并将水下地形的坡度α以及点H和点O之间的预设距离h代入上述边界条件中即可得到支撑杆的位置,并根据支撑杆的位置确定出连接杆位置。
为解决上述的第三个技术问题,所述步骤2中还包括计算点H和点O之间的距离h最大值,具体过程为:
将点H和点O之间的预设距离h取值范围设为[h
采用二分法对h值进行依次赋值,赋值后的h值分别记为:h
其中,h
并以赋值后的各个h值分别计算步骤2中的边界条件,直至|h
则将h
与现有技术相比,本发明的优点在于:将用于支撑安装平台的每根支撑杆以能相对所述安装平台转动的方式约束在所述安装平台上,并且将每根用于连接相邻的两根支撑杆的连接杆均以能独立地沿着与其相连的支撑杆的长度方向上下移动的方式约束在支撑杆上。因此该支撑杆的支撑角度可调,并且通过连接杆的位置调整,从而使支撑杆形成的支架能安装稳定,并且能根据不同的三维成像需求进行调整,以适用于有坡度的地形。
附图说明
图1为本发明实施例中声呐测量系统的结构示意图;
图2为图1的另一视角结构示意图;
图3为图1中A处的放大图;
图4为本发明实施例中具有坡度的水下地形示意图;
图5为本发明实施例中声呐测量系统的简化图;
图6为本发明实施例中声呐测量系统安装在具有坡度的水下地形简化图。
具体实施方式
以下结合附图实施例对本发明作进一步详细描述。
如图1~3所示,本实施例中的声呐测量系统包括声呐1和支架2。通过将声呐1安装在支架2上进行测量,该声呐1的具体结构可参考现有技术,在此不展开赘述。本实施例中的声呐1采用三维全景成像声呐BV5000-1350,该三维全景成像声呐BV5000-1350能直接获取目标物外形轮廓的水平、垂直、高度三个方向上的数据,并同时获得目标物属性等细节描述,可生成目标的实时三维立体图像,且该系统能够在含沙量大、能见度低、水下地形复杂的水域环境中工作。
如图1所示,支架2包括安装平台21、至少三根支撑杆22、连接杆23和底座25。本实施例中的安装平台21为圆形平板状平台,用于供声呐1安装在其上表面;每根支撑杆22均第一端221和第二端222,每根支撑杆22的第一端221均约束在安装平台21底部,每根支撑杆22的第二端222均与底座25转动连接,并且底座25的底部设有尖端251;如图2所示,该底座25呈圆盘状,通过将尖端251深入到泥面,圆盘状的底座25与泥面接触,增强了支架2侧向受力稳定能力,提升了支架2在复杂地形的适用性;连接杆23数量与支撑杆22的数量相对应,每根连接杆23对应连接相邻的两根支撑杆22。
本实施例中的每根支撑杆22的第一端221均以能相对安装平台21转动的方式约束在安装平台21上,每根连接杆23均以能独立地沿着与其相连的支撑杆22的长度方向上下移动的方式约束在支撑杆22上。如图3所示,每根支撑杆22外分别套设有套环24,每个连接杆23与相邻的两套环24均相转动连接,本实施例中套环24为一个圆形型活动扣,便于拆卸和安装,并通过螺丝固定,增强支架2调整的灵活性,同一连接杆23的两端,一端与套环24通过螺栓固定,另一端通过活动插销与相邻的套环24固定。
另外为实现支撑杆22的长度可调,本实施例中支撑杆22为三根,每根支撑杆22包括至少两节相互套设并能相对伸缩滑动的中空杆体,上下两节相邻杆体之间通过连接件26固定。如图2所示,该连接件26为活动插销和弹簧顶针相配合。
本实施例中每根支撑杆22的第一端221与安装平台21相铰接,每根支撑杆22的第二端222与底座25相铰接,并且连接杆23与套环24均相铰接。通过铰接的连接方式,从而使支撑杆22与安装平台21之间形成的夹角可以灵活改变,并且通过调整套环24沿着支撑杆22的长度方向上下移动的位置,调节连接杆23的位置,以实现控制支撑杆22与安装平台21的角度。
如图1和图2所示,安装平台21的底部设有3个呈倒置U形的第一安装座30,每个底座25上设有1个呈U形的第二安装座31,每个套环24的侧边设有2个呈侧向U形的第三安装座32,每个支撑杆22的第一端221和第二端222分别对应约束于第一安装座30和第二安装座31内;每根连接杆23的两端对应约束于相邻两套环24上的第三安装座32内。
为实现大坡比地形的水下检测,本实施例中一种应用有声呐测量系统的三维成像声呐水下检测方法包括如下步骤:
步骤1、获取水下地形的坡度;
步骤2、根据步骤1中水下地形的坡度,按照最不利因素原则假定边界条件,对支架进行力学分析和稳定性计算;
步骤3、根据步骤2中的计算结果,锁定连接杆与支撑杆位置,并组装安装平台,之后在安装平台上安装声呐,并将声呐与远程的控制端相连接;
步骤4、将声呐测量系统放入水下,直至达到水下地形的坡面上时,在声呐测量系统放置稳定后,即启动声呐进行水下检测工作。
本实施例中采用姿态仪对工作水域沿着坡面方向固定距离的两点进行水深测量,如图4所示,将姿态仪沿着坡面固定距离l放入在水下的两测点处,根据两次水深差h2-h1与固定距离l计算得出水下地形的坡度tanα,tanα=(h2-h1)/l。
为实现步骤2中对支架进行力学分析和稳定性计算,支架的简化图如图5所示,其中线段DH表示声呐,其中点H为安装平台21的中心点,线段HA、HJ、HC分别为三根支撑杆,每根支撑杆均等长;线段MN、NP、MP分别为三根连接杆,若声呐的重心始终存在于支脚ACJ垂直投影区域的上方,支架则处于稳定、可靠状态。
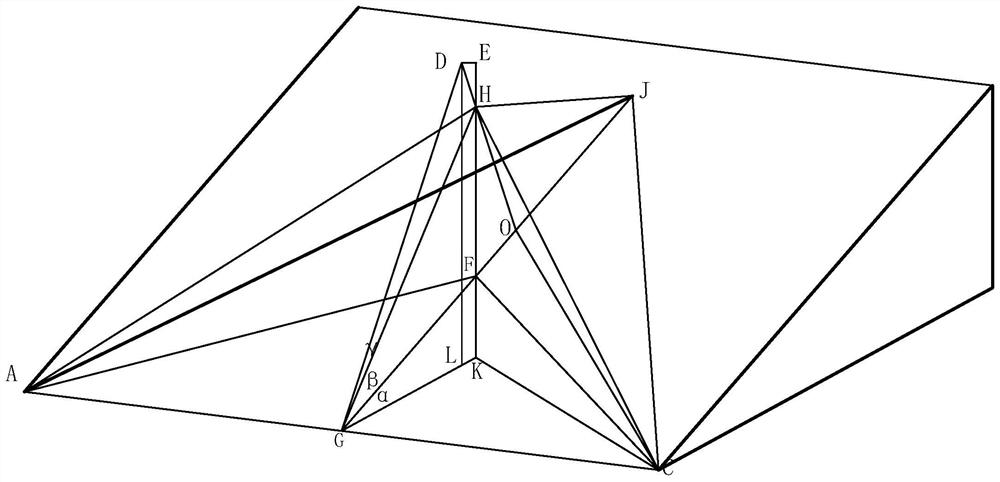
假设将三根支撑杆的第二端所对应的点A、C、J分别安装于坡面上,如图6所示,点A、C、J组成的三角形ACJ则与坡面重合,GK、KC、HK分别是x、y、z轴,点F点为点H垂直向下并与坡面的交点,K点为点H垂直向下并与水下地形水平面的交点,由于支架各结构的重心以及重量不一致,上方声呐的质量较大,声呐的线段DH与坡面GF垂直,与垂线EH存在一定的夹角。由图6可知,支撑杆以及上方的声呐会发生一定程度的倾斜,因此以大坡比地形下工作最不利条件和方便计算为准则,满足两支脚连线AC与坡面线GF垂直情况下∠DGK小于等于90°,即可保证在同一坡比地形下支架其他摆设情况能够安全稳定。
将线段DH作垂直于直线GF的线段,得到线段DO,其中点O为线段DH与直线GF的交点,因为坡面的存在,导致声呐DH与坡面GF垂直,因此会与垂线形成∠DHE=∠FHO=∠FGK=α,因此空间形成HFO、HOJ、HOC三角形;由结构构件可知,杆AH、HJ、HC在声呐固定平台的角度可以上下调动,即∠JHO大小可以调动。在xy平面上看结构,支撑杆间的角度为120°,恒定不变的;其中坡度∠FGK为α,由上述力学分析可知需满足∠DGK<90°即可保证支架稳定,因此可以先对∠HGF设定为β。
其中初设HO的长度,即支架在水平面上,安装平台到水平面的垂直高度,杆长恒定为L;
HA=HC=HJ
因为∠JOC=120°
OF=HOtanα
GF=GO-OF
FK=GF·sin(α)
GK=GF·cos(α)
根据∠DHE=∠FHO=∠FGK=α,得出以下数量关系:
ED=DH·sin(α)
EH=DH·cos(α)
因此
DL=EK=EH+HF+FK
GL=KG-ED
根据边界条件:
GL>0并且0°<∠DGK<90°
其中,GL为点G和点L之间的距离,∠DGK为直线DG和直线GK之间的角度,
将水下地形的坡度α以及点H和点O之间的预设距离h代入上述边界条件中即可得到支撑杆的位置,并根据支撑杆的位置确定出连接杆位置。此时,支架的搭建稳定并且可靠,在不更改相应设备重量以及更改相应结构的同时,能够适应在大坡比地形稳定工作。
为了获得更好视野,实施过程中应保证支架稳定的情况下,尽可能使得点H和点O之间的距离h值最大化,故步骤2中还包括计算点H和点O之间的距离h最大值,具体过程为:
将点H和点O之间的预设距离h取值范围设为[h
采用二分法对h值进行依次赋值,赋值后的h值分别记为:h
其中,h
并以赋值后的各个h值分别计算步骤2中的边界条件,直至|h
则将h
本实施例中已知支撑杆AH=2m,连接杆MN=1m,假设坡度为30°,h
1)坡度=30°,h
2)坡度=30°,h
3)根据以上计算结果,采用二分法对坡度=30°,h=(L+10)/2;
4)反复以上过程,直至|h
由上表可知|h
由上表可知计算到h
求得HM=0.67m,从而确定连接杆位置。
- 一种基于水下无人航行器的合成孔径声呐实时成像方法
- 一种三维成像声呐点云的水下地形匹配定位方法及系统
- 一种水下声呐成像系统目标检测方法