一种高速重载平面串并联搬运机器人
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及工业机器人技术领域,特别是涉及一种高速重载平面串并联搬运机器人。
背景技术
搬运机器人作为工业机器人的重要分支,其主要用于完成各类搬运或者装配工作,可以高效精确的完成某些复杂条件或者严峻环境下的工业任务,广泛应用于塑料工业,汽车制造工业,药品食品工业,环境工业等许多领域。为了满足工业中对搬运机器人长期性,稳定性,高效性工作的需求,对于搬运机器人有以下两点需要重点关注,第一是提高机器人的承载能力;第二则是提升机器人的可靠性。
冗余驱动机构可以有效提高机构的承载能力,提升机构的刚度,满足重载、高速的货物运输要求。
发明内容
针对目前运输机器人在大载荷下的货物运输要求,本发明提供一种高速重载平面串并联搬运机器人,该机器人具有安装方便,结构紧凑,稳定性好,承载能力强的特点。
本发明的技术方案,一种高速重载平面串并联搬运机器人,包括机架,左驱动摆杆,左传动杆,中驱动杆,右驱动摆杆,右传动杆和连接块,左驱动摆杆和右驱动摆杆的一端均与机架通过转动副一连接,左驱动摆杆远离机架的一端通过转动副三与左传动杆连接;左传动杆的另一端通过转动副四与连接块连接;
右驱动摆杆远离机架的一端通过转动副三与右传动杆连接;右传动杆的另一端通过转动副四与连接块相连;
中驱动杆的顶部与机架通过转动副二连接;中驱动杆为电缸,其输出端设置传动丝杆与连接块焊接;中驱动杆沿着直线运动,构成移动副;
连接块上设置转动副五,连接块通过转动副五与摆动臂连接,摆动臂的末端设置末端执行器。
优选的,左驱动摆杆、右驱动摆杆与机架之间的转动副一为驱动关节;位于两侧的转动副一分别通过电机一和电机二驱动,电机一和电机二的机座固连在机架上。
优选的,连接块与摆动臂之间的转动副五为驱动关节;转动副五通过电机三驱动,电机三的机座固连在连接块上。
优选的,中驱动杆的移动副为驱动关节;转动副二、转动副三、转动副四均为被动关节。
优选的,左驱动摆杆与右驱动摆杆长度相同;左传动杆与右传动杆长度相同。
优选的,连接块上开有供中驱动杆连接的螺纹孔。
优选的,机器人在平衡位置处保持左右对称。
优选的,连接块绕圆柱转动;连接块沿着中驱动杆在直线传动方向伸长;摆动臂相对于连接块的转动。
优选的,中驱动杆的固定端通过转动副二绕机架转动;中驱动杆的传动丝杆末端呈“T”形,且与连接块保持垂直。
优选的,摆动臂远离连接块的一端,串联一个或多个摆臂,末端执行器连接在串联的摆臂末端夹起,固定或移动货物。
与现有技术相比,本发明具有如下有益的技术效果:
本发明的高速重载平面串并联搬运机器人具有四个驱动和三个自由度,其连接块可以实现绕圆柱的转动和沿中驱动杆直线传动方向的伸长,其摆动臂可以实现相对于连接块的转动,机构共有四个驱动关节,分别与三台电机,一台电缸连接属于并联与串联组合冗余驱动机器人,冗余驱动可以有效提高机构刚度,提升机构的承载能力,满足在重载荷或者其他严峻环境条件下的高精度的货物运输要求。
附图说明
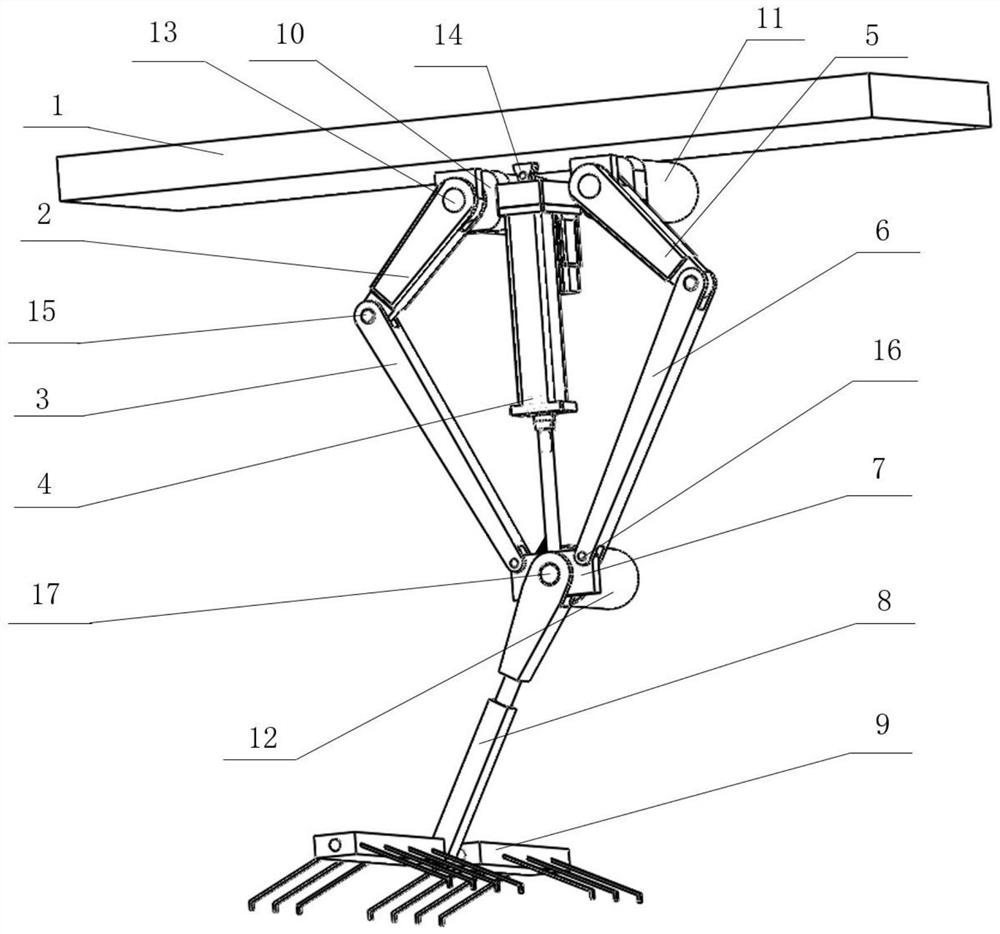
图1为本发明的整体结构示意图;
图2为本发明的背部结构示意图;
图3为本发明实施例2的结构示意图;
图4为本发明实施例3的结构示意图。
附图标记:1、机架;2、左驱动摆杆;3、左传动杆;4、中驱动杆;5、右驱动摆杆;6、右传动杆;7、连接块;8、摆动臂;9、末端执行器;10、电机一;11、电机二;12、电机三;13、转动副一;14、转动副二;15、转动副三;16、转动副四;17、转动副五;21、套筒;31、转动副六。
具体实施方式
实施例1
如图1和图2所示,本实施例的高速重载平面串并联搬运机器人,包括机架1,传动部分和驱动部分;传动部分包括五个连杆,一节连接块,分别为左驱动摆杆2,左传动杆3,右驱动摆杆5,右传动杆6,连接块7,摆动臂8;驱动部分包括三台电机和一台电缸,分别为电机一10,电机二11,电机三12和中驱动杆4;该机器人涉及的运动副包括转动副一13,转动副二14,转动副三15,转动副四16,移动副,转动副五17。
具体地,左驱动摆杆2与右驱动摆杆5长度相同,左传动杆3与右传动杆6长度相同,中驱动杆4与连接块7通过焊接连接呈“T”形,连接块7中心开有用于连接中驱动杆4的螺纹孔,左右对称,故该机器人在平衡位置时左右对称。
进一步地,左驱动摆杆2与机架1之间的转动副和右驱动摆杆5与机架1之间的转动副性质相似,只有左右之分,因此将其共同命名为转动副一13;同理,左传动杆3与左驱动摆杆2之间的转动副和右传动杆6与右驱动摆杆5之间的转动副共同命名为转动副三15;左传动杆3与连接块7之间的转动副和右传动杆6与连接块7之间的转动副共同命名为转动副四16;中驱动杆4与机架1之间的转动副命名为转动副二14;中驱动杆4的电缸具有移动副;连接块7与摆动臂8之间的转动副命名为转动副五17。
具体地,机构的自由度之一是摆动臂8可相对与连接块7转动。转动副之间是同销连接。
转动副的驱动方式采用电机驱动,在所有的运动关节中,转动副一13,移动副和转动副五17为驱动关节,分别与电机一10,电机二11,中驱动杆4,电机三12相连,除此之外其他运动关节均为被动关节。
具体地,电机一10,电机二11和电机三13采用直流电机,其机座均固连在机架1上,电机一10的转子与左驱动摆杆2和机架1之间的转动副连接,电机二11的转子与右驱动摆杆5和机架1之间的转动副连接;所述电机三12的机座固连在连接块7上,转子与转动副五17连接。
具体地,中驱动杆4的电缸驱动移动副,中驱动杆的直线传动杆尾部通过螺纹与焊接的方式与连接块7固连。
摆动臂8的一端与连接块7相连,另一端可以按需选择合适的末端执行器9,用于夹起,固定或移动货物。
机器人为冗余驱动机构,该机构具有三个自由度,其连接块7可以实现绕圆柱的转动和沿中驱动杆4直线传动方向的伸长,其摆动臂8可以实现相对于连接块7的转动,机构共有四个驱动关节,分别与三台电机,一台电缸连接。
机器人工作时,以左驱动摆杆2和右驱动摆杆5绕机架的转动和中驱动杆4的电缸的直线传动杆的伸长为驱动,驱使连接块7绕圆柱的转动和沿电缸直线传动方向的伸长;与此同时,电机三12驱动摆动臂8相对于连接块7转动;摆动臂8尾部装末端执行器9,摆动臂8的该运动用于货物的水平方向的横向或者纵向的运输。
实施例2
如图3所示,本发明还提供了一种高速重载平面串并联搬运机器人的机构示意图,实施例2与实施例1的区别在于,实施例2使用套筒21替换了实施例1中的中驱动杆4的电缸,即使用被动运动的移动副来替换主动运动的电缸。此时所述机器人的移动副为被动关节,本实例的机器人为三驱动三自由度机器人,此时驱动数目等于自由度数目,机构仍然具有高精度,良好稳定性的运输能力。
实施例3
如图4所示,本发明还提供了一种高速重载平面串并联搬运机器人的机构示意图,实施例3与实施例1的区别在于,实施例3舍去了实施例1中的连接块7和中驱动杆4,将实施例1中的转动副四16动副五17。合并为一个转动副六31,转动副六31为主动运动关节,由电机驱动。本实例的机器人为三驱动三自由度机器人,此时驱动数目等于自由度数目,机构仍然具有高精度,良好稳定性的运输能力。
以上所述是本发明的优选实施方式,如果应用场合需要末端执行器具备更加灵活的运动,则可以在摆臂8的基础上再串联另一个摆臂或者多个摆臂,也可以在摆臂8的基础上串联一个直线伸缩机构或者电缸,然后再安装末端执行器,构成自由度更多的搬运机器人。
对于本领域的普通技术人员来说,这属于不脱离本发明原理的前提下,做出的变型和改进,这些也应视为本发明的保护范围。
- 一种重载机器人串并联组合弹簧平衡器
- 一种重载桁架搬运机器人及其搬运方法