取力发电专用调速控制器
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及车载发电机组底盘发动机系统,尤其是涉及取力发电专用调速控制器。
背景技术
以往的特种车辆通常选用中、小型柴油/汽油发电机组作为野外作业时的应急供电装置。由于发电机组包含有发动机(汽油机或柴油机)作为动力源驱动发电机旋转发电,其体积和重量一般相对较大、较重,占用了车辆的空间,增加了车辆的重量。为了减少发电机组占用整车的空间和重量,增加特种车行驶过程中的机动性能,考虑在驻车的情况下使用底盘发动机作为动力驱动发电机旋转发电,为整车提供电源,这种方式称之为取力发电系统。
但是,底盘发动机首先考虑的是满足车辆行驶性能要求,其飞轮转动惯量较小,而发电机组所用发动机要求转速调速率较大,这就造成了取力发电系统输出的交流电技术指标难以实现。为了使取力发电系统能够达到传统发电机组输出的技术性能指标,需要对取力发电系统的底盘发动机进行精确的转速控制。
发明内容
本发明目的就在于提供一种取力发电专用调速控制器,达到对底盘发动机的转速进行精确控制,以满足发电机组的输出技术指标。
为实现上述目的,本发明采取下述技术方案:
本发明所述的取力发电专用调速控制器,包括转速闭环PID控制单元、位置闭环PID控制单元、电流闭环PID控制单元;
所述转速闭环PID控制单元,用于对底盘发动机转速进行负反馈控制;包括第一比较器U1,所述第一比较器U1同相输入端与所述底盘发动机的转速采样信号连接,第一比较器U1反相输入端用于设定基准转速值;基准转速值可以通过外接调速电位器来调节其大小;
所述位置闭环PID控制单元,用于对底盘发动机油门执行器的位置进行负反馈控制;包括第二比较器U2,所述第二比较器U2同相输入端与所述油门执行器的位置采样信号连接,第二比较器U2反相输入端用于设定基准位置值;
所述电流闭环PID控制单元,用于对所述油门执行器的驱动电流进行负反馈控制;包括第三比较器U3,所述第三比较器U3同相输入端与油门执行器驱动线圈的电流采样信号连接,第三比较器U3反相输入端用于设定所述驱动线圈的基准电流值;
所述转速采样信号与所述基准转速值经第一比较器U1比较后,形成转速偏差校正电压值输出;所述位置采样信号与所述基准位置值经第二比较器U2比较后,形成油门执行器的位置校正值输出;所述电流采样信号与所述基准电流值经第3比较器U3比较后,形成所述驱动线圈的校正电流值输出;
输出的所述转速偏差校正电压值、所述位置校正值和所述校正电流值经PID运算及放大后,通过PWM驱动模块调整输出电压占空比,推动油门执行器完成对底盘发动机转速偏差的增/减转速控制;
即:当转速信号低于基准转速值时,则增加输出电压占空比,提高油门执行器驱动线圈的驱动电流来加大油门执行器行程,从而增加转速;反之,降低转速。
可选择地,所述转速采样信号由磁电式转速传感器采集,所述磁电式转速传感器通过感应所述底盘发动机的飞轮齿圈转速,产生一个与所述飞轮齿圈转速成比例的脉冲交流信号,所述脉冲交流信号经F/V转换电路转换为直流电压信号后,输出给所述第一比较器U1同相输入端;
所述位置采样信号由磁感应位置传感器采集,所述磁感应位置传感器对所述油门执行器的油门驱动转轴的转动角度进行采样后,发送给所述第二比较器U2同相输入端;
所述电流采样信号由H桥电路采集,所述H桥电路对所述驱动线圈的电流进行采样后,发送给所述第三比较器U3同相输入端。
可选择地,所述H桥电路由场效应晶体管Q1、Q2、Q3、Q4组成;所述场效应晶体管Q1的源极与场效应晶体管Q2的漏极连接,场效应晶体管Q3的源极与场效应晶体管Q4的漏极连接;所述驱动线圈的两端分别连接在场效应晶体管Q1、Q3的源极之间。
本发明克服了传统调速控制器采用转速单闭环的PID控制方式所存在的不足,采用三闭环PID控制方式对转速、执行器电流和位置进行闭环PID控制,执行器的位置闭环PID控制有效消除了调速机构摩擦力及其换向的影响,执行器的电流闭环PID控制,克服了执行器温度漂移造成的输出力改变,从而大大增强了取力发电调速系统的稳定性,具备很好的瞬态和稳态控制能力,达到对底盘发动机调节速度更快、精度更高、动态性能更优之目的,满足了车载取力发电需求。
附图说明
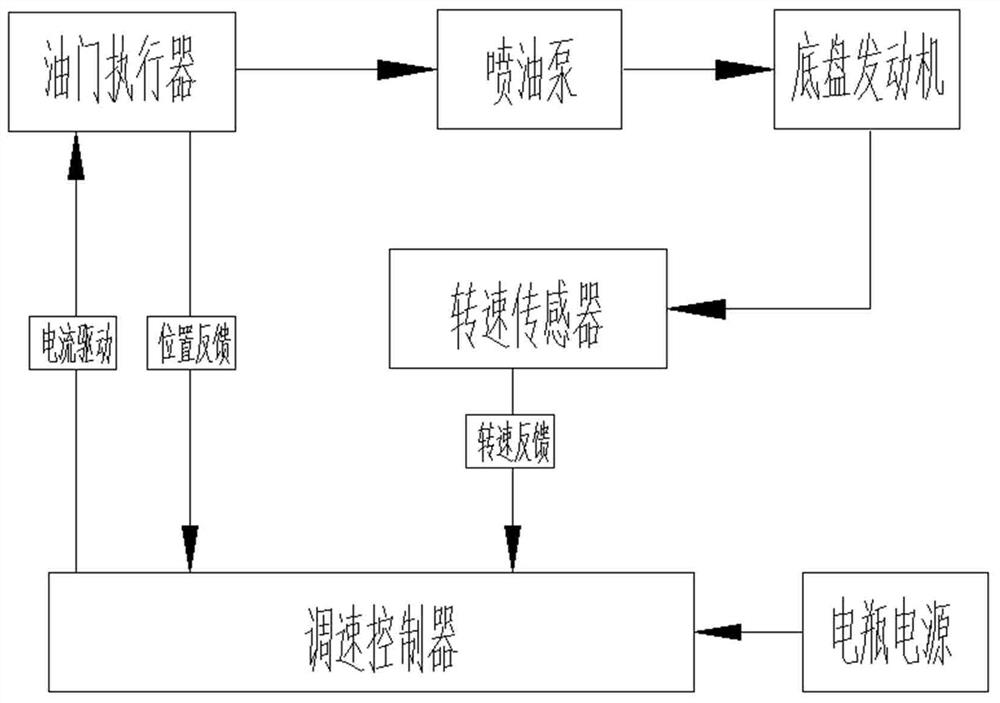
图1是本发明所述底盘发动机的转速控制原理框图。
图2是本发明的电路原理图。
图3是本发明所述油门驱动转轴与喷油泵拉杆的装配示意图。
图4是本发明所述的H桥电路原理图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明,在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
另外,全文中出现的“和/或”的含义为,包括三个并列的方案,以“A和/或B为例”,包括A方案,或B方案,或A和B同时满足的方案。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
如图1、2所示,本发明所述取力发电专用调速控制器,包括转速闭环PID控制单元、位置闭环PID控制单元、电流闭环PID控制单元。
所述转速闭环PID控制单元,用于对底盘发动机转速进行负反馈控制;包括第一比较器U1,所述第一比较器U1同相输入端与所述底盘发动机的转速采样信号连接,第一比较器U1反相输入端用于设定基准转速值,基准转速值可以通过外接调速电位器来调节其大小。
有益地或示例性地,所述转速采样信号由磁电式转速传感器采集,所述磁电式转速传感器通过感应所述底盘发动机的飞轮齿圈转速,产生一个与所述飞轮齿圈转速成比例的脉冲交流信号,所述脉冲交流信号经F/V转换电路转换为直流电压信号后,输出给所述第一比较器U1同相输入端。
磁感应位置传感器采用非接触式线性位置测量传感器(型号:MLX90365LDC),可以在非接触情况下感应到油门驱动转轴的转动位置,有效地解决了同类产品中,采用电位器跟随执行器油门驱动转轴转动的方式所存在容易磨损和损坏现象。
所述位置闭环PID控制单元,用于对底盘发动机油门执行器的位置进行负反馈控制;包括第二比较器U2,所述第二比较器U2同相输入端与所述油门执行器的位置采样信号连接,第二比较器U2反相输入端用于设定基准位置值;位置闭环PID控制单元的设置,效消地消除了调速机构摩擦力及换向的影响。
有益地或示例性地,如图3所述,所述位置采样信号由磁感应位置传感器1采集,所述磁感应位置传感器1对所述油门执行器的油门驱动转轴2的转动角度进行采样后,发送给所述第二比较器U2同相输入端。
所述电流闭环PID控制单元,用于对所述油门执行器的驱动电流进行负反馈控制;包括第三比较器U3,所述第三比较器U3同相输入端与油门执行器驱动线圈的电流采样信号连接,第三比较器U3反相输入端用于设定所述驱动线圈的基准电流值。
电流闭环PID控制单元的设置,克服了执行器温度漂移造成的输出力改变,从而大大增强了取力发电调速系统的稳定性。
有益地或示例性地,所述电流采样信号由H桥电路采集,所述H桥电路对所述驱动线圈的电流进行采样后,发送给所述第三比较器U3同相输入端。
有益地或示例性地,如图4所述,所述H桥电路由场效应晶体管Q1、Q2、Q3、Q4组成;所述场效应晶体管Q1的源极与场效应晶体管Q2的漏极连接,场效应晶体管Q3的源极与场效应晶体管Q4的漏极连接;所述驱动线圈的两端分别连接在场效应晶体管Q1、Q3的源极之间。
如图2所述,转速采样信号与所述基准转速值经第一比较器U1比较后,形成转速偏差校正电压值输出;所述位置采样信号与所述基准位置值经第二比较器U2比较后,形成油门执行器的位置校正值输出;所述电流采样信号与所述基准电流值经第3比较器U3比较后,形成所述驱动线圈的校正电流值输出。
输出的所述转速偏差校正电压值、所述位置校正值和所述校正电流值经PID运算及放大后,通过PWM驱动模块调整输出的电压占空比,推动油门执行器带动油门驱动转轴2(如图3所示)旋转一定的角度,从而带动喷油泵拉杆3对柴油发动机油门进行调节,完成对柴油发动机转速的增/减控制,消除与设定转速的偏差。即:当转速信号低于基准转速值时,则增加输出的电压占空比,提高油门执行器驱动线圈的驱动电流来加大油门执行器行程,从而增加转速;反之,降低转速。本发明比传统调速控制器调节速度更快,精度更高,动态性能更优。
- 取力发电调速控制装置
- 一种驻车取力发电系统调速执行器安装装置