一种基于柔顺控制的机器人装配算法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于工业智能装配技术领域,涉及到一种基于柔顺控制方法的机器人精密轴孔装配算法。
背景技术
机器人精密轴孔装配作业是指采用机器人将轴零件装配至与之配套的孔零件当中,装配过程受装配系统、装配对象和环境因素影响较大,零件孔、轴之间可能发生位姿偏差,甚至发生变形,需要适当的装配策略来解决轴端面接触时的较大装配力,避免零件和机器人损伤。
柔顺控制是解决机器人装配中产生较大应力的方法,但此类方法需要配合一定的装配策略才能较好的完成装配任务。因此基于柔顺控制的机器人装配算法也应运而生。
发明内容
本发明主要解决的问题是克服上述方法的不足,针对目前机器人精密轴孔装配效率低、接触应力大、成功率低等问题,提供一种基于柔顺控制的机器人装配算法。本发明基于主动柔顺控制方法,利用机器人末端法兰位置的六维力传感器的传感器数据对轴孔零件接触状态进行判断。根据轴孔零件接触状态的不同可以将装配过程分为孔外寻孔、孔内调整、插孔三个过程。通过对以上三个过程采取不同的装配策略完成装配任务。
为了达到上述目的,本发明的技术方案为:
一种基于柔顺控制的机器人装配算法,包括以下步骤:
步骤1:引导机器人进行孔外寻孔;
当轴孔中心未对齐、位置有偏差时,轴孔对接便会发生卡阻,此时机器人必须寻找孔位置,本发明对现有方法改进,提出倾斜螺旋搜索的方法。所述倾斜螺旋搜索是针对二维环境的优化搜索策略,能够包含特定搜索半径内的所有可能的孔位置且查找孔位置的速度比其他路径快。在寻孔阶段,轴向进给Z方向上进行力控制,机器人采用导纳控制,使轴孔接触点保持一个恒定的压力,以便能找到孔。径向平面所在坐标X、Y方向上进行位置控制,位置的轨迹为螺旋线的搜索方式,其搜索以接触点为起始点,由内向外以恒定的线速度和角速度远离这个点形成的轨迹进行,如图1所示。
其运动方程为:
式中:t为搜索进行时间,w为搜索角频率,体现为螺旋线的密度,r为搜索半径,v为搜索速度。
步骤2:引导机器人在孔内调整;
轴孔中心Y轴方向对齐:当搜索到孔之后,轴和孔会出现两种业界已知的接触状态:一点接触,两点接触。如图2所示,由于倾角较小,不会出现三点接触的情况。当X轴方向的力矩M
轴孔在X轴方向一点接触:当轴孔在Y轴方向对齐之后再调整轴沿X轴方向平移,当Y轴方向的力矩M
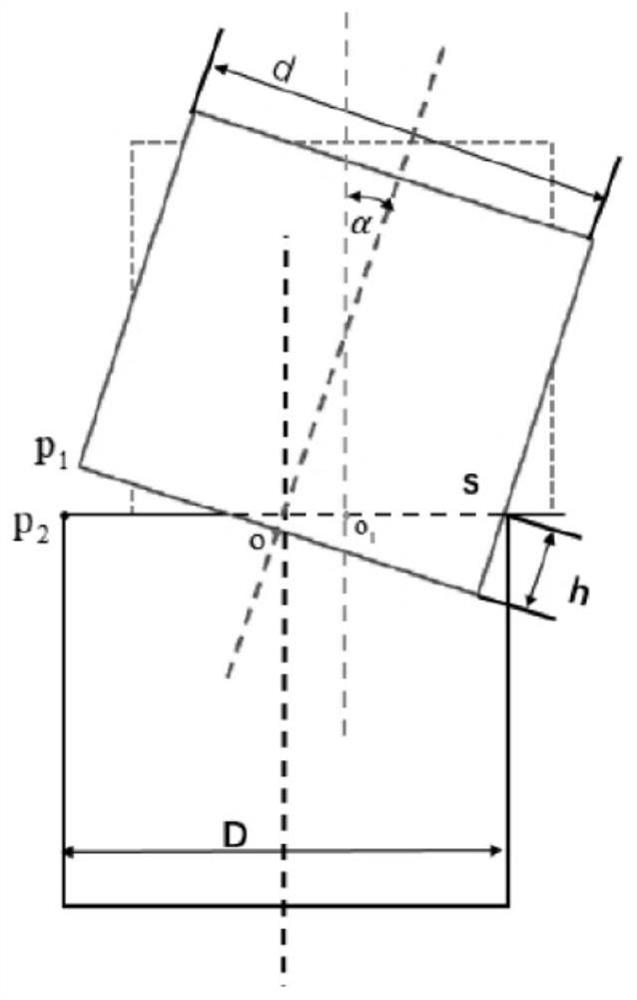
轴倾斜回正:将机器人的工具坐标点由原来轴的中心点o替换成轴孔接触点s,将工件绕s点顺时针旋转-α,即绕Y轴旋转-α,便可将轴回正。由几何关系,接触点s与轴中心点o的轴向距离h为:
式中,m表示轴孔首次接触状态时o
在轴回正的过程中,为了保证不发生卡阻,则初始螺旋搜索时倾斜角α不能过大,当轴孔两点接触,也就是轴的边缘位置P
式中D表示孔的直径,d表示轴的直径。
轴孔微调,轴刚进入孔内时可能会出现孔内一点接触,根据此时的X,Y轴力矩进行微调,使力矩最小。
步骤3:引导机器人在孔内插孔;
至此轴孔的中心点已经对齐,沿Z方向插入,当六维力传感器检测到的接触力F
本发明的效果和益处是:
本发明通过基于柔顺控制的机器人寻孔、调整、插孔的过程提高了轴孔装配的成功率,达到了对于各类轴孔零件加工误差都具有一定的适应能力。同时,柔顺控制的方法也在装配过程中,保证了接触应力不超过许用值。另外,本发明能在少量测试数据以及较低的成本下有效提高轴孔装配成功率并减少单次装配时间,相较于传统方法具有更高的装配效率和准确率。
附图说明
图1为本发明实施例中第一阶段中螺旋线轨迹图;
图2为孔内调整过程中一点接触(a)和两点接触(b)状态图,图中Z坐标表示轴向进给方向,X,Y表示径向方向。
图3为孔内调整过程中轴孔在X轴方向一点接触状态图;图中,d、D分别表示轴和孔的直径,P1、P2分别表示轴和孔的边缘位置,s为轴孔接触点,h表示一点接触时轴插入的距离。
具体实施方式
以下结合附图和技术方案,进一步说明本发明的具体实施方式。
本发明实施例中使用基于主动柔顺控制方法,利用位置及六维力传感器传感器数据对零件接触状态进行判断。根据轴孔零件接触状态的不同可以将装配过程分为孔外寻孔、孔内调整、插孔三个过程。通过对以上三个过程采取不同的装配策略完成装配任务。
参见图1,在本实施例中,以某轴孔零件装配过程为例,装配算法包括以下步骤:
步骤1:引导机器人在孔外搜孔。首先机器人在寻孔阶段,Z方向上进行力控制,保持一个恒力10N,在许用接触力范围内使轴孔在接触点处保持一个恒定的指向轴线方向的压力,以便能找到孔。X,Y方向上进行位置控制,位置的轨迹为螺旋线的搜索方式,其搜索以接触点为起始点,由内向外以恒定的线速度和角速度远离这个点形成的轨迹进行,如图1所示。
其运动方程为:
式中:t为搜索进行时间,w为搜索角频率,体现为螺旋线的密度,
当X,Y方向上接触力超过阈值时,结束搜孔阶段。
步骤2:引导机器人在孔内调整;在本实例中轴孔中心与Y轴方向对齐:当搜索到孔之后,对轴和孔接触状态进行判断。如图2所示,当X轴力矩M
式中,m表示轴孔首次接触状态时o
在轴回正的过程中,为了保证不发生卡阻,则初始螺旋搜索时倾斜角α不能过大,当轴孔两点接触,也就是图中轴的P
轴刚进入孔内时可能会出现孔内一点接触,根据此时的X,Y轴力矩进行微调,使力矩最小。
步骤3:引导机器人在孔内插孔;
至此轴孔的中心点已经对齐,沿Z方向插入,当六维力传感器检测到的F
以上示例性实施方式所呈现的描述仅用以说明本发明的技术方案,并不想要成为毫无遗漏的,也不想要把本发明限制为所描述的精确形式。显然,本领域的普通技术人员根据上述教导做出很多改变和变化都是可能的。选择示例性实施方式并进行描述是为了解释本发明的特定原理及其实际应用,从而使得本领域的其它技术人员便于理解、实现并利用本发明的各种示例性实施方式及其各种选择形式和修改形式。本发明的保护范围意在由所附权利要求书及其等效形式所限定。
- 基于智能算法的机器人力位柔顺控制方法
- 基于智能算法的机器人力位柔顺控制方法