一种锥束CT设备射线源焦点中心位置标定块及标定方法
文献发布时间:2023-06-19 18:53:06
技术领域
本发明涉及一种用于对锥束CT设备射线源焦点中心在面阵探测器上成像位置进行测量调整的标定块及标定方法。可用于锥束CT设备射线源焦点成像位置的现场快速测试及调整。
背景技术
使用锥束CT设备对被检测工件进行图像采集时,若射线源焦点中心在面阵探测器上的成像位置与面阵探测器中心偏离过大,会造成图像采集质量差,三维模型重建精度低,导致图像处理软件的尺寸测量误差较大,无法精确精确测量及正常使用。锥束CT设备首次使用、定期校正、更换设备后及进行高精度图像采集前均需要对射线源的焦点中心在面阵探测器上的成像位置进行标定和调整,使射线源焦点中心在面阵探测器上的成像位置与面阵探测器中心完全重合,或者在满足测量精度及使用要求的前提下调整射线源焦点中心在面阵探测器上的成像位置,使其与面阵探测器中心的偏离值在误差允许范围内。
《无损检测工业X射线系统焦点特性第3部分:狭缝照相机射线照相方法》(GBT25758.3-2010)中规定了使用狭缝照相机射线照相法测量工业X射线系统射线源焦点的方法,使用标准中规定的狭缝试块和测量方法可以测出射线源焦点在的尺寸大小,但是无法测出射线源焦点中心在面阵探测器上的成像位置相对面阵探测器中心的偏离值;标准中规定的狭缝试块为单缝型狭缝试块,仅有一条缝隙,使用时对狭缝试块的高度摆放位置、射线束与狭缝对称轴的夹角位置精度要求高,测试过程复杂,不能满足现场快速测试及调整,快速标定、简易便捷操作的实际使用需求。
发明内容
本发明的目的在于:提供一种锥束CT设备射线源焦点中心位置标定块及标定方法,实现射线源焦点中心在面阵探测器上成像位置的准确、快速标定。
本发明的技术方案如下:一种锥束CT设备射线源焦点中心位置标定块,包括压紧板A、压紧板B;在压紧板A、压紧板B之间交替叠加、平铺放置多层重金属材料薄板和多层透波材料薄板,通过紧固螺栓将压紧板A、压紧板B之间的多层重金属材料薄板和多层透波材料薄板紧密层压,形成多条狭缝通路。
压紧板A、压紧板B、重金属材料薄板、透波材料薄板均为正方形。
一种锥束CT设备射线源焦点中心位置的标定方法,包括以下步骤:
S1:根据面阵探测器的像素阵列和具体采集模式,以面阵探测器的水平方向为x轴,竖直方向为y轴,以面阵探测器成像区域内左下侧第一个像素阵列点P的坐标为(1,1),在面阵探测器成像区域内建立平面直角坐标系;
S2:进行射线源焦点中心在面阵探测器上成像位置x轴坐标标定,在射线源和面阵探测器之间的载物台上竖直放置标定块,标定块的侧面靠近面阵探测器,压紧板A、压紧板B平面垂直于面阵探测器,调整射线源、载物台、面阵探测器、标定块的左右水平相对位置,直至能由面阵探测器采集到具有竖直亮线的标定块的DR图像;在标定块亮线沿y轴区域y2和y3范围内沿平行于x轴方向的线A任意提取整张图像的灰度曲线,将该灰度曲线x轴方向像素值与面阵探测器的x轴方向的像素坐标值关联对应,根据线A上图像灰度值的变化,找出竖直亮线所对应位置的灰度曲线上灰度值突变点,沿该突变点向x轴做垂线,垂足所对应的x轴方向像素坐标值为xA,xA即为射线源焦点中心在面阵探测器上成像位置的x轴坐标;
S3:进行射线源焦点中心在面阵探测器上成像位置y轴坐标标定,在射线源和面阵探测器之间的载物台上水平放置标定块,标定块的侧面靠近面阵探测器,调整射线源、载物台、面阵探测器的相对高度位置,直至能由面阵探测器采集到具有水平亮线的标定块的DR图像;在标定块亮线沿x轴区域x2和x3范围内沿平行于y轴方向的线B任意提取整张图像的灰度曲线,将该灰度曲线y轴方向像素值与面阵探测器y轴方向的像素坐标值关联对应,根据线B上图像灰度值的变化,找出水平亮线所对应位置的灰度曲线上灰度值突变点,沿该突变点向y轴做垂线,垂足所对应的y轴方向像素坐标值为yB,yB即为射线源焦点中心在面阵探测器上成像位置的y轴坐标;
S4:将获得的坐标(xA,yB)与面阵探测器中心位置坐标(x1,y1)进行比较,若坐标点一致或者坐标点位置偏差数值在本次测量所允许的范围内,则完成射线源焦点中心在面阵探测器上成像位置的标定;
所述S1中,将面阵探测器成像区域内所有像素阵列点在平面直角坐标系中赋于对应的坐标值;
所述S1中,以最小像素阵列间隔为1个最小刻度.
所述S4中,若坐标点一致或者坐标点位置偏差数值不在本次测量所允许的范围内,对射线源、载物台、面阵探测器的物理位置进行相应调整,重复S1至S3,直至射线源焦点中心在面阵探测器上成像位置坐标(xA,yB)与面阵探测器中心位置坐标(x1,y1)一致或者坐标点位置偏差数值在本次测量所允许的范围内
本发明的显著效果在于:采用多狭缝叠加结构的标定块,降低射线源焦点中心在面阵探测器上成像位置标定时对标定块摆放位置精度的要求,克服了单一狭缝试块需要高精确摆位才能进行标定测试的弊端。根据面阵探测器的像素阵列和具体采集模式,将面阵探测器成像区域内所有像素阵列点在平面直角坐标系中赋于对应的坐标值,通过DR图像灰度曲线上的灰度值突变点对应找出射线源焦点中心在面阵探测器上的成像位置坐标,简化了射线源焦点中心在面阵探测器上成像位置现场标定方法,优化了标定操作过程和步骤,有效提高了检测标定效率。
附图说明
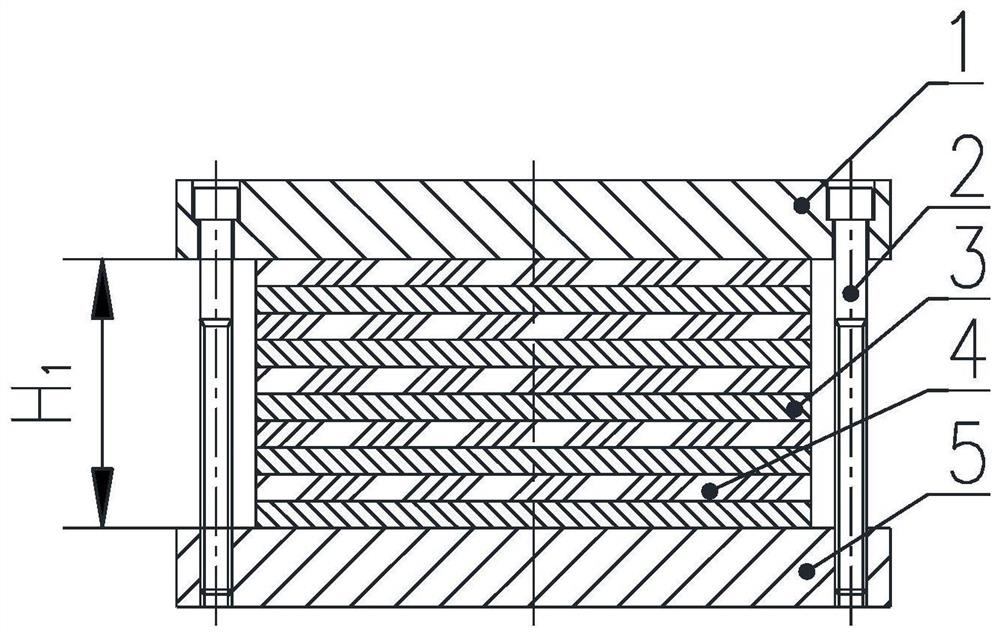
图1为标定块结构示意图;
图2为在面阵探测器成像区域内建立平面直角坐标系示意图;
图3为进行射线源焦点中心在面阵探测器上成像位置x轴坐标标定时射线源、标定块、载物台及面阵探测器之间位置关系示意图;
图4为进行射线源焦点中心在面阵探测器上成像位置x轴坐标标定时DR图像竖直亮线、灰度曲线提取位置及坐标值关联示意图;
图5为进行射线源焦点中心在面阵探测器上成像位置y轴坐标标定时射线源、标定块、载物台及面阵探测器之间位置关系示意图;
图6为进行射线源焦点中心在面阵探测器上成像位置y轴坐标标定时DR图像水平亮线、灰度曲线提取位置及坐标值关联示意图;
图中:压紧板A1;紧固螺栓2;重金属材料薄板3;透波材料薄板组成4;压紧板B5;射线源6;面阵探测器7;标定块8;载物台9
具体实施方式
一种锥束CT射线源焦点中心位置标定块及标定方法,包括:
如图1所示。在压紧板A1、压紧板B5之间交替叠加、平铺放置多层重金属材料薄板3和多层透波材料薄板4,通过紧固螺栓2将压紧板A1和压紧板B5之间的多层重金属材料薄板3和多层透波材料薄板4紧密层压,形成多条狭缝通路,保证射线束在不同的高度位置范围内均能通过标定块,降低对标定块高度位置摆放的精度要求。
压紧板A1、压紧板B5、重金属材料薄板3、透波材料薄板4均为正方形,组装完成的标定块为长方体结构,水平放置时,标定块的高度应明显小于标定块的长度和宽度。
标定方法:
S1:根据面阵探测器7的像素阵列和具体采集模式,以面阵探测器7的水平方向为x轴,竖直方向为y轴,以最小像素阵列间隔为1个最小刻度,以面阵探测器7成像区域内左下侧第一个像素阵列点P的坐标为(1,1),在面阵探测器7成像区域内建立平面直角坐标系,如图2所示,将面阵探测器7成像区域内所有像素阵列点在平面直角坐标系中赋于对应的坐标值。
S2:进行射线源6焦点中心在面阵探测器7上成像位置x轴坐标标定时,在射线源6和面阵探测器7之间的载物台9上竖直放置标定块8,标定块8的侧面靠近面阵探测器7,标定块压紧板A1或压紧板B5平面垂直于面阵探测器7,如图3所示;调整射线源6、载物台9、面阵探测器7、标定块8的左右水平相对位置,直至能由面阵探测器7采集到具有竖直亮线的标定块8的DR图像;在标定块亮线沿y轴区域y2和y3范围内沿平行于x轴方向的线A任意提取整张图像的灰度曲线,如图4所示,将该灰度曲线x轴方向像素值与面阵探测器7的x轴方向的像素坐标值关联对应,根据线A上图像灰度值的变化,找出竖直亮线所对应位置的灰度曲线上灰度值突变点,沿该突变点向x轴做垂线,垂足所对应的x轴方向像素坐标值为xA,xA即为射线源焦点中心在面阵探测器上成像位置的x轴坐标;
S3:进行射线源焦点中心在面阵探测器上成像位置y轴坐标标定时,在射线源6和面阵探测器7之间的载物台9上水平放置标定块8,标定块8的侧面靠近面阵探测器7,如图5所示;调整射线源6、载物台9、面阵探测器7的相对高度位置,直至能由面阵探测器7采集到具有水平亮线的标定块8的DR图像;在标定块亮线沿x轴区域x
S4:将获得的坐标(xA,yB)与面阵探测器7中心位置坐标(x1,y1)进行比较,若坐标点一致或者坐标点位置偏差数值在本次测量所允许的范围内,则完成射线源焦点中心在面阵探测器上成像位置的标定。否则,对射线源6、载物台9、面阵探测器7的物理位置进行相应调整,重复S1至S3,直至射线源焦点中心在面阵探测器上成像位置坐标(xA,yB)与面阵探测器中心位置坐标(x1,y1)一致或者坐标点位置偏差数值在本次测量所允许的范围内,即完成射线源焦点中心在面阵探测器上成像位置的标定。
下面进一步列举实施例以说明本发明。
使用如图1所示的标定块进行射线源焦点中心在面阵探测器上的成像位置校正及标定。重金属材料薄板3由钨、铅或类似的具有吸收性能的材质制作,确保射线束不能穿透重金属材料薄板3到达面阵探测器。透波材料薄板4由聚酯、树脂或类似的射线容易穿透的材质制作,确保射线束能够穿透透波材料薄板到达面阵探测器进行成像。
在压紧板A1和压紧板B5之间交替叠加、平铺放置多层重金属材料薄板3和多层透波材料薄板4,通过紧固螺栓2将压紧板A1和压紧板B5之间的多层重金属材料薄板3和多层透波材料薄板4紧密层压,在高度H
使用锥束射线扫描方式,使用像素阵列为4096×4096大小的面阵探测器、以4096×4096的模式进行图像采集,进行射线源焦点中心在面阵探测器上的成像位置校正。该图像采集模式下,以面阵探测器的水平方向为x轴,竖直方向为y轴,以最1个小像素阵列间隔为1个最小刻度,以面阵探测器成像区域内左下侧第一个最小像素阵列点p坐标为(1,1),在面阵探测器成像区域内建立平面直角坐标系,如图2所示。则此面阵探测器的中心位置点k在上述坐标系中对应的像素坐标(x
进行射线源焦点中心在面阵探测器上成像位置x轴坐标标定时,在射线源6和面阵探测器7之间的载物台9上竖直放置标定块8,标定块8的侧面尽量靠近面阵探测器7,标定块压紧板A1或压紧板B5平面垂直于面阵探测器,如图3所示;调整射线源6、载物台9、面阵探测器7、标定块8的左右水平相对位置,直至能由面阵探测器7采集到具有竖直亮线的标定块8的DR图像;在标定块亮线沿y轴区域y2和y3范围内沿平行于x轴方向的线A任意提取整张图像的灰度曲线,如图4所示,将该灰度曲线x轴方向像素值与面阵探测器7的x轴方向的像素坐标值关联对应,根据线A上图像灰度值的变化,找出DR图像中竖直亮线所对应位置的灰度曲线上灰度值突变点,沿该突变点向x轴做垂线,垂足所对应的x轴方向像素坐标值为xA,xA即为射线源焦点中心在面阵探测器上成像位置的x轴坐标,如xA=1967;
进行射线源焦点中心在面阵探测器上成像位置y轴坐标标定时,在射线源6和面阵探测器7之间的载物台9上水平放置标定块8,标定块8的侧面尽量靠近面阵探测器7,如图5所示;调整射线源6、载物台9、面阵探测器7的相对高度位置,直至能由面阵探测器7采集到具有水平亮线的标定块8的DR图像;在标定块亮线沿x轴区域x2和x3范围内沿平行于y轴方向的线B任意提取整张图像的灰度曲线,如图6所示,将该灰度曲线y轴方向像素值与面阵探测器y轴方向的像素坐标值关联对应,根据线B上图像灰度值的变化,找出DR图像中水平亮线所对应位置的灰度曲线上灰度值突变点,沿该突变点向y轴做垂线,垂足所对应的y轴方向像素坐标值为yB,yB即为射线源焦点中心在面阵探测器上成像位置的y轴坐标,如yB=2043;
将获得的射线源焦点中心在面阵探测器7上成像位置坐标(xA,yB)即(1967,2043)与面阵探测器7中心位置坐标(x1,y1)即(2048,2048)进行比较,坐标点数值存在偏差,若该偏差数值在本次测量所允许的范围内,则完成射线源焦点中心在面阵探测器7上成像位置坐标标定,否则对射线源、转台、探测器的物理位置进行相应调整,重复上述步骤,直至射线源焦点中心在面阵探测器7上成像位置坐标为(2048,2048)或调整至差值在认可的范围内,完成该设备射线源焦点中心在面阵探测器上成像位置的标定。
- 基于重建图像梯度的L0范数最小化的锥束CT旋转中心标定方法
- 基于重建图像梯度的L0范数最小化的锥束CT旋转中心标定方法