自动化配药系统的自动识瓶装置
文献发布时间:2023-06-19 19:16:40
技术领域
本公开大体涉及医用机械设备领域,具体涉及一种自动化配药系统的自动识瓶装置。
背景技术
输液是临床常用的医疗方法,通过该医疗方法能够将药液、营养液等液体物质输注到患者体内中,以帮助患者康复。当患者需要接受输液等时,经常需要根据病情对多种不同的注射药物进行混合,以调配出具有更好疗效的治疗药液。在临床中,医护人员等可以通过将不同容器例如安瓿瓶或西林瓶中的药物转移至输液袋中进行混合,以得到患者所需的治疗药液。
目前,医护人员等通常使用人工操作的方式来调配对患者实施输液所需的治疗药液。这样的配药方法存在可改进之处。一方面,护士在对输液袋进行配药时操作步骤比较繁杂。具体的,护士在对输液袋进行配药时往往需要一手来回握持输液袋、西林瓶和安瓿瓶,一手操作移液器。繁琐的操作导致以护士进行手动配药的整体效率偏低。另一方面,以护士进行手动配药存在出错的风险而配药出错的后果往往比较严重。
为了提高配药的效率以及降低人工操作可能带来的风险,现有一种自动配药装置,该装置在对药瓶进行处理后转移至自动混药的工位进行自动化混药,以此替代人工操作进行自动化配药,从而提高配药工作的效率以及提高配药的安全性与准确率。然而,任何技术总是渴望进步。
发明内容
发明人发现,药瓶可能在进入药柜或药瓶处理工位或者进入与袋式容器中的药液混合前的其他工位中发生实际药瓶与期望药瓶不一致的情况。基于这一发现,本公开的目的在于提供一种通过对药瓶进行识别从而减少在药物与药液混合前因药物不满足用药要求而造成配药错误的自动化配药系统的自动识瓶装置,提高自动化配药系统配药的准确性与安全性。
一种自动化配药系统的自动识瓶装置,所述自动化配药系统是将袋式容器中的药液与药瓶中的药物进行自动混合的配药系统,并且在自动混合之前所述自动识瓶装置对所述药瓶进行识别,并根据识别的结果对所述袋式容器进行标记,其特征在于,所述自动识瓶装置包括用于移动药瓶的转移机构、对药瓶进行扫描并识别的识别机构、对混合了药瓶中的药物的袋式容器进行标记的标记机构、以及控制所述转移机构、所述识别机构和所述标记机构的控制模块,所述转移机构包括用于夹持药瓶的夹持部和与所述夹持部连接并驱动所述夹持部的驱动部,所述识别机构包括用于装载药瓶的承载部、以及对置于所述承载部的药瓶进行扫描以获取扫描图像的扫描部和对扫描图像进行识别的识别模块,所述控制模块配置为通过所述转移机构将药瓶转移到所述承载部,通过所述识别机构使所述扫描部与药瓶相对移动从而所述扫描部对药瓶进行扫描以获得扫描图像,并且所述识别模块基于所述扫描图像识别药瓶中的药物是否满足要求,所述控制模块通过所述转移机构将扫描后的药瓶转移至混合工位,在所述混合工位,将药瓶中的药物混合到袋式容器的药液中,所述控制模块通过所述转移机构将不满足要求的药瓶排出所述自动化配药系统。
在这种情况下,能够利用转移机构将药瓶放置在承载部,并在药物与药液混合前对药瓶进行扫描识别以判断药瓶中的药物是否符合用药要求,进而标记机构能够根据扫描结果对袋式容器进行标记。通过在将药瓶中的药物与袋式容器中的药液混合的混合工位前设置自动识瓶装置,利用识别机构识别药瓶,配合转移机构对药瓶在承载部与混合工位之间进行转移或将不符合要求的药瓶排出自动化配药系统,以扫描结果对袋式容器进行标记,并且将转移机构、识别机构与标记机构设置为由控制模块统一配合控制。由此,能够提高自动识瓶装置的机械化与自动化程度以及工作效率,同时还能够提高药瓶中的药物与袋式容器中的药液混合的安全性与准确性。
另外,在本公开所涉及的自动识瓶装置中,可选地,所述夹持部包括第一夹持部和与所述第一夹持部联动的第二夹持部,当所述第一夹持部移动到所述承载部时,所述第二夹持部从所述承载部移动到所述混合工位。在这种情况下,夹持部能够同时夹持多个药瓶,从而能够提高工作效率和减少转移机构的失误。
另外,在本公开所涉及的自动识瓶装置中,可选地,所述承载部包括至少能够在竖直方向移动的承载平台和以可相对于所述承载平台自转的方式安装在所述承载平台并用于固定药瓶的支承座。在这种情况下,能够调整承载平台的高度,并且能够使放置在支承座上的药瓶自转以进行线扫描。
另外,在本公开所涉及的自动识瓶装置中,可选地,所述识别模块配置为在使药瓶自转的情况下对药瓶进行扫描以获取扫描图像,并且基于所述扫描图像识别药瓶。在这种情况下,识别机构能够获得药瓶的扫描图像以判断该药物是否满足用药要求。
另外,在本公开所涉及的自动识瓶装置中,可选地,所述识别模块配置为将所述药瓶的扫描图像与预设图像进行比对并获得所述扫描图像与所述预设图像的重合度百分比以判断所述药瓶是否符合用药要求。在这种情况下,识别模块可以根据设定的重合度百分比界定值与获得的重合度百分比进行比对,判断药瓶是否符合用药要求。
另外,在本公开所涉及的自动识瓶装置中,可选地,所述扫描部为具有线扫描功能的扫描仪,所述扫描部在使药瓶自转的情况下对药瓶的外周图像进行逐线扫描。在这种情况下,通过逐线扫描可以获得药瓶的侧面展开图像。
另外,在本公开所涉及的自动识瓶装置中,可选地,转移至所述承载部的药瓶为已开帽的安瓿瓶。在这种情况下,能够对安瓿瓶进行扫描识别以获取判断安瓿瓶是否符合用药要求。另外,能够在安瓿瓶的药物混合前对安瓿瓶进行扫描。
另外,在本公开所涉及的自动识瓶装置中,可选地,所述支承座包括固定药瓶的第一凹槽和设置在所述第一凹槽的外周且围绕所述第一凹槽且呈环状的第二凹槽。在这种情况下,第一凹槽能够对药瓶进行吸附,第二凹槽能够接收溅出的药物。
另外,在本公开所涉及的自动识瓶装置中,可选地,所述识别机构包括照明部,所述照明部具有光源并且配置为当所述扫描部对药瓶进行扫描时照明药瓶。在这种情况下,能够在扫描时利用照明部对药瓶进行照明。
另外,在本公开所涉及的自动识瓶装置中,可选地,在所述夹持部将药瓶从所述承载部转移至所述混合工位之前,所述承载平台进行调节以使药瓶的水平高度匹配所述混合工位的水平高度。在这种情况下,能够提高药瓶在转移过程中的的稳定性,减少药瓶在转移过程中因承载平台与混合工位的高低差造成的药物撒落的影响。
根据本公开,能够提供一种通过对药瓶进行识别从而减少在药物与药液混合前因药物不满足用药要求而造成配药错误的自动化配药系统的自动识瓶装置,提高自动化配药系统配药的准确性与安全性。
附图说明
现在将仅通过参考附图的例子进一步详细地解释本公开,其中:
图1是示出了本公开示例所涉及的自动化配药系统的自动识瓶装置的示意图。
图2是示出了本公开示例所涉及的自动化配药系统的自动识瓶装置的结构框图。
图3是示出了本公开示例所涉及的转移机构的立体示意图。
图4是示出了本公开示例所涉及的转移机构的结构框图。
图5是示出了本公开示例所涉及的识别机构的立体示意图。
图6是示出了本公开示例所涉及的识别机构的结构框图。
图7是示出了本公开示例所涉及的自动化配药系统的自动识瓶装置的工作流程图。
具体实施方式
以下,参考附图,详细地说明本公开的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。需要说明的是,本公开中的术语“包括”和“具有”以及它们的任何变形,例如所包括或所具有的一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可以包括或具有没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。本公开所描述的所有方法可以以任何合适的顺序执行,除非在此另有指示或者与上下文明显矛盾。
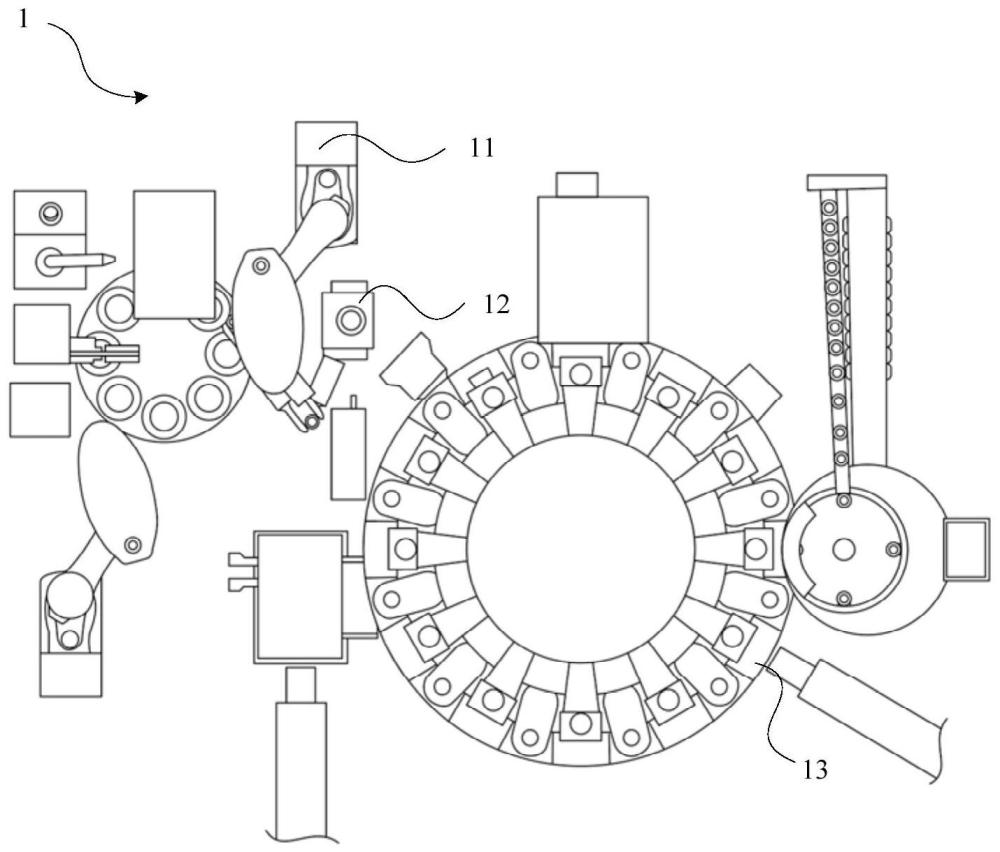
图1是示出了本公开示例所涉及的自动化配药系统1的自动识瓶装置10的示意图。图2是示出了本公开示例所涉及的自动化配药系统1的自动识瓶装置10的结构框图。
如图1所示,本公开涉及一种自动化配药系统1的自动识瓶装置10的一种实施例。
一种自动化配药系统1的自动识瓶装置10,自动化配药系统1是将袋式容器中的药液与药瓶中的药物进行自动混合的配药系统,并且在自动混合之前自动识瓶装置10对药瓶进行识别,并根据识别的结果对袋式容器进行标记。通过利用自动化机械设备完成配药,降低由人工操作所可能带来的风险,该风险包括但不限于药瓶种类选择的错误、药品用量选择的错误、将混合了错误药瓶的药物的袋式容器对患者进行注射。
自动识瓶装置10包括用于移动药瓶的转移机构11、对药瓶进行扫描并识别的识别机构12、对混合了药瓶的药物的袋式容器进行标记的识别机构12、以及控制转移机构11、识别机构12和的控制模块(未图示)。在这种情况下,利用控制模块对移动药瓶的转移机构11、对药瓶进行扫描并识别的识别机构12与对混合了药瓶的药物的袋式容器进行标记的进行统一控制,使不同的机构之间可以相互配合工作。由此,能够提高自动识瓶装置10的机械化与自动化程度以及工作效率。
转移机构11包括用于夹持药瓶的夹持部112和与夹持部112连接并驱动夹持部112的驱动部111。在这种情况下,驱动部111可以在竖直方向以及水平方向上移动,以此驱动夹持部112夹持药瓶至目标位置。
识别机构12包括用于装载药瓶的承载部121、以及对置于承载部121的药瓶进行扫描以获取扫描图像的扫描部123和对扫描图像进行识别的识别模块(未图示)。在这种情况下,能够通过识别模块对扫描图像的扫描部123所获得的承载部121上的药瓶的扫描图像进行药瓶中药物的信息识别。
控制模块配置为通过转移机构11将药瓶转移到承载部121,通过识别机构12使扫描部123与药瓶相对移动从而扫描部123对药瓶进行扫描以获得扫描图像,并且识别模块基于扫描图像识别药瓶的药物是否满足要求。在这种情况下,通过利用识别模块对扫描部123获得的扫描图像识别并对其是否符合要求进行判断,在提高配药操作的自动化程度,提高配药效率的同时保证配药的准确性。
控制模块通过转移机构11将扫描后满足要求的药瓶转移至混合工位,而将不满足要求的药瓶排出自动化配药系统1。在混合工位,将药瓶的药物与袋式容器的药液混合,并且通过识别机构12对袋式容器进行标记,防止对患者注射不满足要求的药液。也即能够提高药瓶中的药物与袋式容器中的药液混合的安全性与准确性。
根据本公开,能够提供一种通过对药瓶进行识别从而减少在药物与药液混合前因药物不满足用药要求而造成配药错误的自动化配药系统1的自动识瓶装置10,提高自动化配药系统1配药的准确性与安全性。
由图1所示的本公开的实施例所涉及的的自动化配药系统1的自动识瓶装置10。
在一些示例中,药瓶在到达自动识瓶装置10前可以被处理为能被获取药物的状态。例如可以为将安瓿瓶的瓶帽去除。
在一些示例中,药瓶可以由转移机构11移动至最接近将药瓶的药物与袋式容器的药液混合的混合部的的位置。例如可以为承载部121。
在一些示例中,药瓶可以由转移机构11将识别后的药瓶转移至混合工位(未图示)。
在一些示例中,可以将药瓶的识别机构12设置在最接近混合工位的位置。由此,能够有效确保进入混合工位的药瓶即为所需要的药瓶。具体而言,可以防止药瓶在进入混合工位前的自动化配药系统1的任一工位被打乱、或者避免自动化配药系统1的前置工位传输错误的药瓶。
在一些示例中,药瓶经识别不是目标药瓶,则控制模块通过转移机构2将不满足要求的药瓶排出配药系统。
在一些示例中,识别机构12可以对袋式容器进行标记,防止对患者注射混合有不满足要求的药物的药液。
在一些示例中,药瓶可以为透明的玻璃瓶。在这种情况下,能够从外部对药瓶中的药物进行观察。
在一些示例中,药瓶中的药物可以为一人份或两人份。在这种情况下,医护人员可以根据患者的具体情况调配药物的剂量。
在一些示例中,药瓶可以在一到三个步骤内被打开,使药瓶内的药物可以被获取的状态。在这种情况下,自动化配药系统1中的用于打开药瓶的工位可以被简洁设置,由此,能够控制自动化配药系统1制造成本的同时保证自动化配药系统1的配药效率。
在一些示例中,控制模块可以控制识别机构12对位于承载部121的药瓶进行识别。在一些示例中,不满足要求的药瓶可以被转移机构排出自动化配药系统1后,控制模块根据识别模块的识别结果控制识别机构12对袋式容器进行标记,控制模块控制转移机构11进行周期性的运动。也即使转移机构11将经过识别模块识别的药瓶从承载部121移动到混合工位的同时,将未经过识别模块识别的药瓶移动到承载部121,使识别机构12对位于承载部121的药瓶进行识别。
如上所述,本公开示例所涉及的自动化配药系统1的自动识瓶装置10可以包括用于移动药瓶的转移机构11。
图3是示出了本公开示例所涉及的转移机构11的立体示意图。图4是示出了本公开示例所涉及的转移机构11的结构框图。
在一些示例中,如图3所示,转移机构11可以包括驱动部111。在一些示例中,驱动部111连接夹持部112。在一些示例中,驱动部111可以在竖直方向与水平方向上移动。在一些示例中,控制模块可以根据预先设置的运动轨迹控制驱动部111的移动。例如驱动部111可以驱动夹持部112移动至承载部121或混合工位。
在一些实施例中,如图4所示,转移机构11可以包括用于夹持药瓶的夹持部112。
在一些实施例中,夹持部112可以包括第一夹持部112a与第二夹持部112b。在一些示例中,第一夹持部112a可以与第二夹持部112b固定连接驱动部111。
在一些示例中,第一夹持部112a、第二夹持部112b夹持药瓶位置之间的距离与药瓶承载部121和混合工位之间的距离一致。在这种情况下,第一夹持部112a将待识别的药瓶移动至承载部121时,第二夹持部112b可以将识别完成的药瓶移动至混合工位。以此提高药瓶移动的效率。
另外,在一些实施例中,转移机构11可以包括多个夹持部112。在一些示例中,多个夹持部112可以分开设置。在一些示例中,多个夹持部112也可以连接设置。
另外,在一些实施例中,夹持部112与药瓶接触处可以设置有减震材料。由此,能够提高夹持部112在夹持药瓶时的稳定性。
在一些实施例中,转移机构11可以包括夹持部112连接并驱动夹持部112的驱动部111。
在一些实施例中,驱动部111可以包括至少一个驱动电机与至少一个传动机构。在一些示例中,驱动电机可以与传动机构连接。在一些示例中,传动机构与夹持部112连接。在一些示例中,驱动电机可以根据控制模块的控制驱动传动机构。在一些示例中,夹持部112可以在传动机构的传动下移动至承载部121与混合工位。
另外,在一些实施例中,驱动部111可以为机械臂,机械臂由控制模块控制。在一些示例中,控制模块可以控制机械臂在竖直方向与水平方向上移动来带动夹持部112移动至承载部121或混合工位。
另外,在一些实施例中,驱动部111可以包括至少一个液压/气压装置。在一些示例中,液压/气压装置可以与夹持部112连接。在这种情况下,控制模块控制液压/气压装置的伸长/缩短实现对夹持部112在竖直方向与水平方向上的移动,从而使夹持部112移动至承载部121与混合工位。
如上所述,自动化配药系统1的自动识瓶装置10可以包括对药瓶进行扫描并识别的识别机构12。
图5是示出了本公开示例所涉及的识别机构12的立体示意图。图6是示出了本公开示例所涉及的识别机构12的结构框图。
在一些实施例中,识别机构12可以包括用于放置药瓶的承载部121。
在一些实施例中,承载部121可以包括至少能够在竖直方向移动的承载平台121b。
在一些实施例中,承载平台121b连接电缸升降装置。在这种情况下,控制模块可以控制电缸升降装置伸长/缩短,从而实现承载平台121b在竖直方向上的移动。
在一些实施例中,在夹持部112将药瓶从承载部121转移至混合工位之前,控制模块可以控制电缸升降装置伸长/缩短。从而完成对承载平台121b进行竖直方向上的调节以使药瓶的水平高度匹配混合工位的水平高度,使得夹持部112将药瓶平稳地移动至混合工位,防止移动过程中因存在高低差而使药瓶中的药物颠簸洒出。
在一些实施例中,承载部121可以包括支承座121a。在一些示例中,支承座121a可以相对于承载平台121b自转。在一些示例中,支承座121a可任意安装在承载平台121b。在一些示例中,支承座121a可以用于固定药瓶。在一些示例中,支承座121a包括固定药瓶的第一凹槽。
在一些实施例中,第一凹槽的深度可以为5mm~20mm。由此,能够防止支承座121a对药瓶的瓶身过度遮挡。
在一些实施例中,支承座121a可以设置有与第一凹槽连通的抽气泵。在这种情况下,当药瓶移动至支承座121a上时,抽气泵可以将药瓶与支承座121a接触处的空气抽取,利用压强将药瓶固定在支承座121a上。
另外,在一些实施例中,支承座121a可以设置有夹持部112。在一些示例中。夹持部112可用于将药瓶固定在支承座121a上。
在一些实施例中,支承座121a设置驱动电机,驱动电机的驱动轴连接支承座121a的中心位置,在这种情况下,驱动电机通过驱动轴的转动带动支承座121a进行自转,从而使支承座121a可以带动药瓶进行自转。
在一些实施例中,支承座121a的自转速度的范围为0至2转/秒,在这种情况下,防止支承座121a带动药瓶的自转速度过快使药瓶中的药物被洒出。
在一些实施例中,转移至承载部121的药瓶可以为已开帽的安瓿瓶。在一些示例中,在第一凹槽的外周且围绕第一凹槽且设置第二凹槽。在一些示例中,第二凹槽可以是环状布置。在一些示例中,第二凹槽可以用于防止安瓿瓶中的药物在自转时飞溅洒出。在一些示例中,第二凹槽可以用于收集飞溅洒出的药物。由此,能够保持自动化配药系统1的整体清洁。
在一些实施例中,扫描部123可以包括具有线扫描功能的扫描仪。在一些示例中,扫描部123可以在使药瓶自转的情况下对药瓶的外周图像进行逐线扫描。逐线扫描即为扫描仪按一定的频率对扫描仪前的物体获取线状图像。在这种情况下,随着物体的自转,扫描仪获取若干个连续的线状图像。在一些示例中,若干个连续的线状图像按顺序可以组合成为被扫描物体的侧面展开图。
另外,在一些实施例中,扫描部123可以以与药瓶自转方向相反的方向绕药瓶转动,对药瓶进行逐线扫描。
另外,在一些实施例中,药瓶可以静止在支承座121a上,扫描部123绕药瓶转动,对药瓶进行逐线扫描。
另外,在一些实施例中,扫描部123可以设置至少一个滑动导轨与驱动电机。在一些实施例中,滑动导轨的轨迹即为扫描部123的运动轨迹。在一些实施例中,扫描部123可以在滑动导轨上运动,从而实现对药瓶的逐线扫描。
另外,在一些实施例中,扫描部123可以获得药瓶的瓶身上有关药物信息的文字图像。在一些示例中,识别模块可以基于扫描得到的有关药物信息的文字图像判断药瓶的药物是否满足要求。
另外,在一些实施例中,扫描部123可以获得药瓶的瓶身上有关药物信息的条码。
在一些实施例中,扫描部123可以包括照明部122。照明部122可以具有光源。在这种情况下,照明部122可以照明药瓶,使扫描部123获取清晰的图像。
在一些实施例中,照明部122可以包括第一照明部122a和第二照明部122b。在一些示例中,第一照明部122a可以位于药瓶远离扫描部123的一侧。在一些示例中,第二照明部122b可以位于药瓶靠近扫描部123的一侧。在一些示例中,当药瓶为透明无标签时,可以利用第一照明部122a对药瓶进行照明。
在一些示例中,当药瓶为非透明或者有标签时,可以利用第二照明部122b对药瓶进行照明。
另外,在一些实施例中,照明部122可以包括光线传感器。在这种情况下,可以根据扫描部123所处位置的光线亮度,以调节照明部122光源的亮度。由此,能够保证扫描部123所处位置的亮度的同时,节省照明部122的用电量。
另外,在一些实施例中,照明部122可以进行周期性照明。也具体而言,当承载部121上存在待扫描的药瓶时,照明部122打开对药瓶进行照明,当处于药瓶移动的空档期,也即待扫描的药瓶处于移动至承载部121的过程中时,照明部122关闭。由此,能够节省照明部122的用电量。
另外,在一些实施例中,照明部122可根据扫描部123的移动轨迹移动。在这种情况下,照明部122的光源可以对扫描部123进行跟踪照明。由此能够保证扫描图像的清晰度。
在一些实施例中,识别模块可以配置为在使药瓶自转的情况下对药瓶进行扫描以获取扫描图像。在一些实施例中,识别模块可以基于扫描图像识别药瓶。具体而言,识别模块将药瓶的扫描图像与预设图像进行比对以获得扫描图像与预设图像的重合度百分比,将扫描图像与预设图像的重合度百分比与界定值比较。在一些示例中,若比对得到的重合度百分比大于界定值,则药瓶符合用药要求,若比对得到的重合度百分比小于界定值,则药瓶不符合用药要求。在一些示例中界定值可以设定为95%。通过上述方式对药瓶是否符合要求进行识别。
在一些实施例中,标记机构13可以设置于混合工位之后的工位。这种情况下,标记机构13根据识别机构12对药瓶的识别结果对与药瓶对应的袋式容器进行标记。
图7是示出了本公开示例所涉及的自动化配药系统1的自动识瓶装置10的工作流程图。以下,参考图7,描述本公开涉及的自动识瓶装置10的工作过程。
在一些示例中,第一夹持部112a将药瓶移动至支承座121a(步骤S100),照明部122对自转的药瓶进行照明(步骤S200),扫描部123对药瓶进行逐线扫描(步骤S300),识别模块根据扫描图像识别药瓶(步骤S400),第二夹持部112b将符合要求的药瓶移动至药物与药液的混合工位(步骤S500),标记机构13对袋式容器进行标记(步骤S600)。
在一些示例中,在步骤S100中,第一凹槽带动药瓶进行自转。
在一些示例中,在步骤S200中,药瓶为透明无标签,在这种情况下,第一照明部122a从药瓶背后进行照明。另外,在一些示例中,药瓶为非透明或者有标签,在这种情况下,第二照明部122b从药瓶正面进行照明。
在一些示例中,在步骤S400中,具体的识别方式为将药瓶的扫描图像与预先录入的装有所需药物的标准瓶的扫描图像进行比对,判断两者的重合度百分比是否95%时。
在一些示例中,在步骤S500中,若认定药瓶中的药物不为所需药物,第二夹持部112b在移动至混合工位的过程中将药瓶移动至错误药瓶收集处,
通过利用识别模块对扫描部123获得的扫描图像识别并对其是否符合要求进行判断,在提高配药操作的自动化程度,提高配药效率的同时保证配药的准确性。
虽然以上结合附图和实施方式对本发明进行了具体说明,但是可以理解,上述说明不以任何形式限制本发明。本领域技术人员在不偏离本发明的实质精神和范围的情况下可以根据需要对本发明进行变形和变化,这些变形和变化均落入本发明的范围内。
- 自动化配药系统的自动识瓶装置
- 一种能够进行安瓿瓶和西林瓶协同配药的自动化配药系统