晶棒测试设备及晶棒电学性能的测试方法
文献发布时间:2023-06-19 19:18:24
技术领域
本申请实施例涉及晶棒检测设备领域,特别涉及一种晶棒测试设备及晶棒电学性能的测试方法。
背景技术
晶棒是半导体生产的基础材料。在对晶棒进行加工前,需要对晶棒进行清洁以及检测,晶棒品质检测合格后,才能投入使用。其中,晶棒的电学性能是体现晶棒品质好坏的重要指标,目前检测晶棒的电学性能的方法包括人工检测,然而随着半导体产业的发展,对晶棒的需求量的增大,且对晶棒的电学性能的要求提高,从而对晶棒进行电学性能检测的工作量增加。
因此,对晶棒进行电学性能检测的方法有待改善。
发明内容
本申请实施例提供一种晶棒测试设备及晶棒电学性能的测试方法,至少有利于提高对晶棒进行电学性能检测的效率。
根据本申请一些实施例,本申请实施例一方面提供一种晶棒测试设备,包括:运输机构;夹持机构,所述夹持机构的一端与所述运输机构连接,所述夹持机构具有夹持端,所述夹持端用于夹持电性检测设备,且所述夹持机构相对于所述运输机构的位置可调整,以使所述夹持端达到检测工位,使所述电性检测设备对位于所述检测工位的晶棒进行检测,并在检测完成后使所述夹持端离开所述检测工位。
在一些实施例中,所述夹持机构包括:机械臂结构,所述机械臂结构的一端与所述运输机构连接,且所述机械臂结构相对于所述运输机构的位置可调整;夹持部,所述夹持部具有所述夹持端,且与所述机械臂结构的另一端连接。
在一些实施例中,所述机械臂结构包括:机械臂本体以及驱动部件,所述夹持部与一所述机械臂本体连接,所述驱动部件用于驱动所述机械臂本体绕转动轴转动。
在一些实施例中,所述机械臂结构包括多个所述机械臂本体,且每一所述机械臂本体沿不同的方向延伸,每一所述机械臂本体的所述转动轴不同。
在一些实施例中,所述驱动部件包括多个电机驱动轴连接在相邻的所述机械臂本体之间。
在一些实施例中,所述晶棒测试设备还包括夹持部安装底座,所述夹持部安装底座配置在所述机械臂结构与所述夹持部之间,以连接所述夹持部与所述机械臂结构。
在一些实施例中,所述夹持机构还包括:外壳,所述外壳环绕所述夹持端且具有敞口。
在一些实施例中,所述外壳上设置有贯穿所述外壳的可调固定螺丝,所述可调固定螺丝用于连接所述外壳、所述夹持部以及所述电性检测设备。
在一些实施例中,所述夹持机构还包括多个弹簧缓冲器,所述弹簧缓冲器设置于所述外壳背离所述机械臂结构的侧面上。
在一些实施例中,光电距离检测开关,设置在所述夹持机构上,用于检测所述电性检测设备与位于所述检测工位上的所述晶棒之间的距离。
根据本申请一些实施例,本申请实施例另一方面还提供一种晶棒电学性能的测试方法,采用前述实施例提供的晶棒测试设备进行晶棒电学性能的测试,包括:采用运输机构将所述晶棒传输至检测工位;调整所述夹持机构相对于所述运输机构的位置,以使所述夹持端达到所述检测工位,以使所述电性检测设备对位于所述检测工位的所述晶棒进行检测;在完成检测后,调整所述夹持机构相对于所述运输机构的位置,使所述夹持端离开所述检测工位。
本申请实施例提供的技术方案至少具有以下优点:
本申请实施例提供的一种晶棒测试设备,通过设置与运输机构连接的夹持机构,且夹持机构具有用于夹持电性检测设备的夹持端,夹持机构相对于运输机构的位置可调整,从而能够在采用该晶棒测试设备检测晶棒的电学性能的过程中,使夹持端到达检测工位,且运输机构能够运输晶棒至检测工位,从而电性检测设备能够对位于检测工位的晶棒进行检测,并在检测完成后,夹持端可以离开检测工位。如此,相较于人工检测晶棒的电学性能,采用晶棒测试设备进行检测,一方面,能够提高检测工作的自动化,并降低人力成本及劳动强度,有利于提高检测效率,且能够避免人工操作导致的检测误差,有利于提高检测结果的精确度,另一方面,相较于配置有支撑底座的夹持机构,夹持机构与运输机构直接连接的方式,能够减少晶棒测试设备的占地面积。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,除非有特别申明,附图中的图不构成比例限制;为了更清楚地说明本申请实施例或传统技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
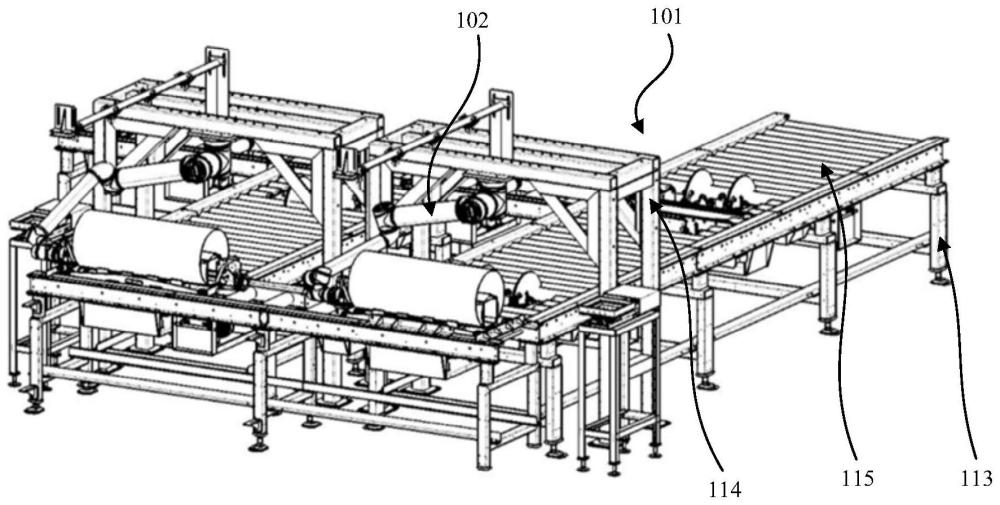
图1为本申请一实施例提供的一种晶棒测试设备的结构示意图;
图2为本申请一实施例提供的一种晶棒测试设备的夹持机构的结构示意图;
图3为本申请一实施例提供的一种晶棒测试设备的机械臂结构的结构示意图;
图4为本申请一实施例提供的一种晶棒测试设备的夹持部的结构示意图;
图5为本申请另一实施例提供的一种晶棒电学性能的测试方法的流程图。
具体实施方式
由背景技术可知,目前对晶棒进行电学性能检测的方法有待改善。
本申请实施例提供一种晶棒测试设备,晶棒测试设备具有一端与运输机构连接的夹持机构,夹持机构具有用于夹持电性检测设备的夹持端,且夹持机构相对于运输机构的位置能够调整,从而在采用该晶棒测试设备对晶棒进行电性能检测过程中,通过调整夹持机构相对于运输机构的位置,能够使夹持端到达检测工位,且运输机构能够运输晶棒至检测工位,从而电性检测设备可以对位于检测工位的晶棒进行检测,在完成对晶棒的检测之后,通过调整夹持机构相对于运输机构的位置,能够使夹持端离开检测工位。如此,相较于人工检测晶棒的电学性能,采用晶棒测试设备进行检测,一方面,一定程度上提高了检测工作的自动化,能够降低人力成本及劳动强度,有利于提高检测效率,且能够避免人工操作导致的检测误差,有利于提高检测结果的精确度,另一方面,相较于配置有支撑底座的夹持机构,夹持机构与运输机构直接连接的方式,能够减少晶棒测试设备的占地面积。
下面将结合附图对本申请的各实施例进行详细的阐述。然而,本领域的普通技术人员可以理解,在本申请各实施例中,为了使读者更好地理解本申请而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施例的种种变化和修改,也可以实现本申请所要求保护的技术方案。
图1为本申请一实施例提供的一种晶棒测试设备的结构示意图,图2为本申请一实施例提供的一种晶棒测试设备的夹持机构的结构示意图,图3为本申请一实施例提供的一种晶棒测试设备的机械臂结构的结构示意图,图4为本申请一实施例提供的一种晶棒测试设备的夹持部的结构示意图。
参考图1至图4,晶棒测试设备可以包括:运输机构101;夹持机构102,夹持机构102的一端与运输机构101连接,夹持机构102具有夹持端(未图示),夹持端用于夹持电性检测设备103,且夹持机构102相对于运输机构101的位置可调整,以使夹持端达到检测工位,使电性检测设备103对位于检测工位的晶棒进行检测,并在检测完成后使夹持端离开检测工位。如此,相较于手持电性检测设备103进行人工检测晶棒的电学性能,采用晶棒测试设备进行检测,一方面,有利于提高检测工作的自动化,能够降低人力成本及劳动强度,有利于提高检测效率,且能够避免人工操作导致的检测误差,有利于提高检测结果的精确度,另一方面,相较于为夹持机构102另外配置有支撑底座,夹持机构102与运输机构101直接连接的方式,能够减少晶棒测试设备的占地面积。
参考图2,夹持机构102可以包括机械臂结构104以及夹持部105,其中,机械臂结构104的一端与运输机构101连接,且机械臂结构104相对于运输机构101的位置可调整,夹持部105具有夹持端,且夹持部105与机械臂结构104的另一端连接。如此,通过调整机械臂结构104相对于运输机构101的位置,能够调整与机械臂结构104相连的夹持部105的位置,从而调整被夹持端夹持的电性检测设备103的位置。
参考图1,在一些实施例中,运输机构101可以包括运输台113、支撑架114以及移动机构115,其中,移动机构115位于运输台113上,支撑架114固定设置于运输台113上,移动机构115可以移动以运输晶棒,支撑架114用于与机械臂结构104连接,以使机械臂结构104能够悬挂于运输台113的上方,减少晶棒测试设备的占地面积。
参考图2及图3,机械臂结构104可以包括机械臂本体106以及驱动部件,夹持部105与一机械臂本体106连接,驱动部件用于驱动机械臂本体106绕转动轴转动,如此,能够通过驱动部件灵活控制机械臂本体106的转动,从而在采用晶棒测试设备进行晶棒电学性能检测过程中,能够调整夹持端相对于运输机构101的支撑架114的位置(参考图1),以使电性检测设备103能够移动至检测工位进行检测。
在一些实施例中,机械臂结构104可以包括一个机械臂本体106,机械臂本体106的端部具有转动轴,驱动部件驱动机械臂结构104绕转动轴转动,以使与机械臂本体106连接的夹持部105可以相对于支撑架114移动。
在一些实施例中,机械臂结构104包括多个机械臂本体106,且每一机械臂本体106沿不同的方向延伸,每一机械臂本体106的转动轴不同,如此,每一机械臂本体106绕其对应的转动轴进行转动,且由于每一机械臂本体106的延伸方向不同,相较于前述实施例中机械臂结构104具有一个机械臂本体106,本实施例能够增加与机械臂结构104连接的夹持部105相对运输机构101可移动的路径及位置,从而在采用晶棒测试设备检测晶棒地电学性能的过程中,能够更灵活地调整电性检测设备103相对于位于检测工位的晶棒的位置,有利于提高电性检测设备103与检测工位的对准精度,优化检测动作。
驱动部件包括多个电机驱动轴107连接在相邻的机械臂本体106之间,电机转动轴107即通过驱动部件控制的相邻机械臂本体106之间的转动轴,通过驱动部件控制电机转动轴107进行转动,以带动与电机转动轴107相连的机械臂本体106进行转动。
在一些实施例中,晶棒测试设备还可以包括控制机构(未图示),控制机构可以与驱动部件电气连接,以发送信号至驱动部件来控制电极转动轴107进行转动,从而与电极转动轴107连接的机械臂本体106可以绕电极转动轴107转动,以调整夹持部105相对于支撑架114的位置。在一些实施例中,控制机构还可以与电性检测设备103电气连接,在电性检测设备103检测晶棒的电学性能之后,可以上传检测结构至控制机构。
晶棒测试设备还可以包括夹持部安装底座108,夹持部安装底座108配置在机械臂结构104与夹持部105之间,以固定连接夹持部105与机械臂结构104。
晶棒测试设备还可以包括机械臂结构安装底座109,机械臂结构安装底座109配置在机械臂结构104与支撑架114之间,以固定连接支撑架114与机械臂结构104。
参考图4,夹持机构102还可以包括外壳110,外壳110环绕夹持端且具有敞口,以保护夹持端以及夹持端夹持的电性检测设备103,其中,敞口可以露出电性检测设备103用于检测晶棒的电学性能的面,以检测晶棒的电学性能。
外壳110上可以设置有贯穿外壳110的可调固定螺丝111,可调固定螺丝111用于连接外壳110、夹持部105以及电性检测设备103,通过设置可调固定螺丝111,能够调整外壳110与外壳环绕的夹持端以及电性检测设备103的位置,有利于降低因电性检测设备103安装不当导致检测的晶棒电学性能存在误差。
在一些实施例中,外壳110上还可以设置有贯穿外壳110的螺丝(未图示),通过设置螺丝以稳定外壳110、夹持部105以及电性检测设备103之间的连接。
可以理解的是,在采用晶棒测试设备测试晶棒的电学性能的过程中,若晶棒测试设备的机械臂结构104出现故障,则可以通过拆除外壳110上的可调固定螺丝111以及螺丝,将电性检测设备103于夹持部105上拆卸,人工手持电性检测设备103进行晶棒的电学性能检测,避免影响检测进度及效率。
夹持机构102还可以包括多个弹簧缓冲器112,弹簧缓冲器112设置于外壳110背离机械臂结构104的侧面上,如此,在采用晶棒测试设备检测晶棒的电学性能过程中,在电性检测设备103移动至检测工位以及离开检测工位的过程中,弹簧缓冲器112能够起到缓冲作用,有利于减轻电性检测设备103与晶棒之间接触可能存在的冲击力,以保护电性检测设备103。
晶棒测试设备还可以包括光电距离检测开关116,光电距离检测开关116可以设置在夹持机构102上,用于检测电性检测设备103与位于检测工位上的晶棒之间的距离。
在一些具体实施例中,光电距离检测开关116可以设置于外壳110背离夹持端的面上,在夹持机构102相对于运输机构101的支撑架114的位置调整,以抵达检测工位的过程中,光电距离检测开关116发射的光线沿外壳110敞口的方向延伸,以探测电性检测设备103与位于检测工位上的晶棒的距离。在一些具体实施例中,光电距离检测开口116也可以设置于外壳110背离机械臂结构104的侧面上,在夹持机构102相对于运输机构101的支撑架114的位置调整,以抵达检测工位的过程中,光电距离检测开关116发射的光线沿外壳110敞口的方向延伸,以探测电性检测设备103与位于检测工位上的晶棒的距离。
在一些实施例中,晶棒测试设备的控制机构还可以用于控制光电距离检测开关106,以在采用晶棒测试设备检测晶棒的电学性能的过程中,光电距离检测开关106的检测数据可以传输至控制机构,从而控制机构能够调整机械臂结构104的转动情况,以调整夹持部105与位于检测工位的晶棒之间的位置关系,降低由于夹持部105与检测工位上晶棒对准误差较大而对测试结果产生的影响,有利于提高检测结果的精确度,并能够避免电性检测设备103受到磕碰。
上述实施例提供的晶棒测试设备,晶棒测试设备具有运输机构101以及与运输机构101的支撑架114连接的夹持机构102,夹持机构102具有夹持端,夹持端用于夹持电性检测设备103,且夹持机构102相对于运输机构101的支撑架114的位置可以调整,即夹持端相对于支撑架114的位置可调整,从而在采用晶棒测试设备检测晶棒的电学性能过程中,运输机构101能够运输晶棒至检测工位,夹持机构102相对于支撑架114的位置进行调整,以使夹持端抵达检测工位,从而电性检测设备103可以对位于检测工位的晶棒进行检测,在检测完成后,夹持端可以离开检测工位。如此,相较于人工检测晶棒的电学性能,采用上述实施例提供的晶棒测试设备进行晶棒电学性能检测,一方面,能够提高检测工作的自动化,并降低人力成本及劳动强度,有利于提高检测效率,且能够避免人工操作导致的检测误差,有利于提高检测结果的精确度,另一方面,相较于配置有支撑底座的夹持机构102,夹持机构102与运输机构101直接连接的方式,能够减少晶棒测试设备的占地面积。
相应的,本申请另一实施例还提供一种晶棒电学性能的测试方法,本申请另一实施例提供的晶棒电学性能的测试方法采用前述实施例提供的晶棒测试设备检测晶棒的电学性能。以下将结合附图对本申请另一实施例提供的半导体结构进行详细说明,与前一实施例相同或者相应的部分,可参考前述实施例的相应说明,以下将不做详细赘述。图5为本申请另一实施例提供的一种晶棒电学性能的测试方法的流程图。
参考图1至图5,步骤S11,采用运输机构101将晶棒传输至检测工位。
晶棒测试设备可以包括运输机构101以及与运输机构101连接的夹持机构102,其中,运输机构101可以包括运输台113、支撑架114以及移动机构115,移动机构115以及支撑架114位于运输台113上,夹持机构102包括机械臂结构104以及具有夹持端的夹持部105,夹持端夹持电性检测设备103。
在采用运输机构101将晶棒传输至检测工位的步骤中可以包括:运输机构101的移动机构115运输晶棒至检测工位,其中,晶棒相对的端面上设置有多个检测点,在后续步骤中,电性检测设备通过测试检测点的电学性能,以获取晶棒的电学性能数据。
参考图1至图5,步骤S12,调整夹持机构102相对于运输机构101的位置,以使夹持端达到检测工位,以使电性检测设备103对位于检测工位的晶棒进行检测。
晶棒测试设备还可以包括光电距离检测开关116以及控制机构,其中,光电距离检测开关116可以设置在夹持机构102上,用于检测电性检测设备103与位于检测工位上的晶棒之间的距离,控制机构可以控制机械臂结构104绕转动轴进行转动,以使夹持部105可以进行移动,且控制机构能够接收电性检测设备103以及光电距离检测开关116量测的数据。
在调整夹持机构102相对于运输机构101的位置,以使夹持端达到检测工位的步骤中,可以包括:控制机构设定程序控制机械臂结构104绕转动轴进行转动,从而夹持部105相对于支撑架114开始移动并抵达晶棒检测工位,以使电性检测设备103对晶棒的电学性能进行检测,并在检测完成后,电性检测设备103上传相关电学性能数据至控制机构,控制机构通过电学性能数据对晶棒的品质进行判断。如此,通过控制机构控制机械臂结构104的转动,以使电性检测设备103能够抵达检测工位进行检测的方法,有利于提高检测工作的自动化,能够降低人力成本及劳动强度,有利于提高检测效率,且能够避免人工操作导致的检测误差,有利于提高检测结果的精确度。
在一些实施例中,在调整夹持机构102相对于运输机构101的位置过程中,可以通过控制机构修改机械臂结构104的动作参数,以优化机械臂结构104的运行动作。
在一些实施例中,调整夹持机构102相对于运输机构101的位置,以使夹持端达到检测工位的步骤中,光电距离检测开关116开启,并量测电性检测设备103用于量测晶棒电学性能的面与晶棒端面之间的距离,且反馈相关数据至控制机构,以调整机械臂结构104的转动,从而能够优化机械臂结构104的运行动作,并能够调整电性检测设备103与晶棒之间的位置关系,如此,有利于避免电性检测设备103在移动过程中发生磕碰等现象。
晶棒测试设备还可以包括贯穿外壳110设置的可调固定螺丝111以及螺丝,可调固定螺丝111以及螺丝用于连接外壳110、夹持部105以及电性检测设备103。在一些实施例中,在调整夹持机构102相对于运输机构101的位置,以使夹持端达到检测工位的步骤中,若机械臂结构104或者控制机构发生故障,可以通过拆除外壳110上的可调固定螺丝111以及螺丝,将电性检测设备103从夹持机构上拆卸下来,人工手持电性检测设备103进行晶棒的电学性能检测,避免影响检测进度及效率。
参考图1至图5,步骤S13,在完成检测后,调整夹持机构102相对于运输机构101的位置,使夹持端离开检测工位。
在调整夹持机构102相对于运输机构101的位置,使夹持端离开检测工位的步骤中可以包括:在电性检测设备103上传电学性能数据至控制机构之后,控制机构控制机械臂结构104绕转动轴进行转动,以使夹持端能够离开检测工位,并在夹持端离开检测工位之后,晶棒经运输机构101的移动机构115运输至下一工序。
上述实施例提供的晶棒电学性能的测试方法,采用本申请实施例提供的晶棒测试设备进行测试,其中,通过运输机构101运输晶棒至检测工位之后,控制机构控制机械臂结构104绕转动轴进行转动,以使夹持部105可以移动并到达检测工位,从而电性检测设备103能够对晶棒进行电学性能的检测,且在检测完成之后,电性检测设备103能够上传电学性能数据至控制机构,从而控制机构在接收电学性能数据之后控制机械臂结构104绕转动轴转动,以带动夹持部105离开检测工位,在夹持部105离开检测工位后,晶棒经运输机构101运输至下一工序。如此,上述实施例提供的晶棒电学性能的测试方法,能够降低检测晶棒电学性能工序中的人力成本及劳动强度,有利于提高检测工序的自动化以及监测效率,并能够避免人工操作导致的检测误差,有利于提高检测结果的精确度。
本领域的普通技术人员可以理解,上述各实施方式是实现本申请的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本申请的精神和范围。任何本领域技术人员,在不脱离本申请的精神和范围内,均可作各种改动与修改,因此本申请的保护范围应当以权利要求限定的范围为准。