用于测量划船技巧的方法和装置
文献发布时间:2023-06-19 19:18:24
技术领域
本公开涉及一种用于提供划手的技巧的定量测量的方法和相关联装置。
背景技术
说明书中使用的术语表:
“负载单元”:划船机消耗划手生成的功率的部分
“拉桨阶段”:划船行程中,划手正在正向(即,远离负载单元)施加力和速度使得手柄在负载单元中做功时的部分
“回桨阶段”:划船行程中,划手正在使手柄反向朝向负载单元移动以准备下一个拉桨阶段的部分,手柄上施加的力可忽略不计
“抓握”:拉桨阶段的开始
“结束”:拉桨阶段的结束
“脚蹬架”:划手的脚与划船机或船接触的区域
“世界坐标系”:用于测量移动的固定惯性参考系
“CM”:质心
“ergo”:划船机或划船测功器的通用缩写
“DPU”:数据处理单元
在竞技性划船运动中,不仅要花费大量的时间开发划手的力量和体能,而且还要开发他们在应用他们的可用力量和体能使船有效地移动方面的技巧,以在目标距离期间实现最大可能速度。通常,划手的技巧通过观察和模仿向其他技巧更加娴熟的划手学习以及通过教练的组合得到提高,其中教练向划手提供关于他们可以如何改进他们的移动以增强他们的船的移动能力的口头定性反馈。这种口头形式的反馈可以在陆地上使用划船机时提供,也可以在水上真正的船中时提供。对于团队船,整体效率还高度依赖于各个划手的移动与他们的队友的同步程度。
口头反馈的定性本质存在的重大问题在于,成功提高划手的技巧极其依赖于教练可以多准确地量化并视觉地解释划手的移动效率可以提高的区域,然后将这种主观解释转换成划手可以理解并应用于其身体移动的词语的形式。
教练经常用划手的视频来支持他们的分析,但是这一般仅在划船时段结束之后才可行。教练还可以在该时段之后提供进一步的口头指令,但是这种反馈中的延迟使得划手更难以吸收所给予的信息,因为他们不太可能准确地将他们事后听到和看到的与他们在该时段期间感知到的他们的身体移动(即,本体感受)相关联。因此,该过程充满了误解,并且通常需要许多个时段(如果有的话)才能实现显著的改进。
在体育科学的研究中众所周知的是,即时(也称为“实时”)、定量且公正的反馈允许运动员通过实验过程或“试错法”来修改他们的移动,并且通常将使得他们的技巧水平更快速地提高,特别是当通过口头指导加以强化时。这种直接、定量且客观的反馈可以减轻当单独的口头反馈效果不佳时可能在教练与运动员彼此之间引起的挫折感。
由于“害怕失败”或者遭受教练主观口头反馈中的不认同,经常还存在心理上的有害影响,并且有时教练使用的讲话音调可能使这个问题恶化。
主观口头指导的另一个危险在于,在指导时段中,教练可能想要尝试一次纠正多于一个错误,而实际上没能就任何一个错误实现切实进展;然后,划手可能在该时段期间感到信息过载并且变得消极,因为感觉他们存在太多错误,并且不能在纠正错误时取得进展。
划船机经常用作划手训练计划的一部分。它们通常经由联接到飞轮的可移动手柄来测量划手在划船行程的拉桨阶段所做的功,该飞轮在飞轮旋转时对手柄的移动提供阻力,从而试图复现划手在真实的船中在水中移动其桨的手柄时经受的阻力。飞轮旋转阻力经常用空气制动叶片实现,但也可经由某些形式的发电机和联接到飞轮的负载而电动地实现。还存在经由线性致动元件(诸如活塞)提供手柄阻力的变型。在以下描述中,术语“负载单元”用于涵盖对手柄移动提供阻力的任何此类装置。
在划船机上训练划手的显著优点在于,训练可以在受控环境中进行,因此不受在水上真正的船中通常经历的高度可变条件的影响。该机器还在受控条件下实时提供划手的功率输出的定量测量,因此该机器是用于客观且一致地在划手之间比较体能水平的良好方式。
然而,使用划船机作为划手的能力的指示器的重大问题在于,通常仅测量划手通过该机器的手柄传递的总功率输出,而无法测量该功率可以多有效地转化为使水上真正的船移动。划手在划船机测试中获得良好结果,但由于其划船技巧中的一个或多个缺陷而不能在真实的船中复现该表现,这一情况并不罕见。
同样常见的是,划手采用特定类型的移动,这种移动在划船机上产生良好的功率测量值,但是实际上不利于使真实的船有效地移动,并且因为划手的训练时间相对大部分花在划船机上而不是在真实的船上划船,所以这些不良习惯可能由于重复而变得根深蒂固。
传统划船机简单地测量划手通过该机器的手柄传递的总功率,这一事实还鼓励划手有意识地或下意识地专注于利用他们的手臂来移动手柄,而实际上,他们的功率输出的较大部分是通过在拉桨阶段期间有效地利用他们的腿部和背部来生成的,其中手臂主要用于将该功率联接到手柄以用于相当大比例的拉桨过程。因此,鼓励划手专注于在移动中有力地利用腿部和背部,这往往将提高他们在水上推进真正的船时的表现。
发明内容
本发明技术的一个方面提供了一种用于提供在划船机上的实时表现反馈的系统,该划船机包括:负载单元,该负载单元联接到支撑轨道;座椅,该座椅可滑动地联接到该支撑轨道以用于支撑划手;手柄,该手柄联接到该负载单元并且被布置成通过在该手柄上的拉动动作相对于该负载单元移动;和脚蹬架,该脚蹬架联接到该支撑轨道并且被布置成接收该脚蹬架上的推动动作,该系统包括:第一传感器,该第一传感器被配置为测量指示该手柄上的该拉动动作的第一参数;第二传感器,该第二传感器被配置为测量指示由该脚蹬架接收的该推动动作的第二参数;和数据处理单元(DPU),该DPU被配置为基于该第一参数和该第二参数来确定该手柄上的该拉动动作与由该脚蹬架接收的该推动动作之间的关系。
在一些实施方案中,该手柄可借助于第一链条或第一线缆联接到该负载单元,并且其中该第一传感器联接到该链条或该线缆并且被配置为测量当拉动该手柄时施加到该第一链条或该第一线缆的张力作为该第一参数以确定拉动力。
在一些实施方案中,该支撑轨道可安装在多个滚轮上,该多个滚轮被布置成沿一组导轨运行,其中该第二传感器可联接到该多个滚轮中的至少一个滚轮并且被配置为测量该划船机相对于地板的移动速度作为该第二参数,并且其中该DPU可被配置为使用该划船机的该[移动]速度来导出由该脚蹬架接收的该推动动作引起的推动力。
在一些实施方案中,该脚蹬架可刚性地联接到该负载单元并且该负载单元通过多个滚轮可滑动地联接到该支撑轨道,其中该第二传感器可联接到该多个滚轮中的至少一个滚轮并且被配置为测量该负载单元相对于该支撑轨道的移动速度作为该第二参数,并且其中该DPU可被配置为使用该负载单元的该移动速度来导出由该脚蹬架接收的该推动动作引起的推动力。
在一些实施方案中,该脚蹬架可通过多个滚轮可滑动地联接到该支撑轨道并且借助于第二链条或第二线缆联接到该负载单元,其中该脚蹬架可被布置成沿该支撑轨道相对于该负载单元移动,其中该第二传感器可联接到该多个滚轮中的至少一个滚轮并且被配置为测量该脚蹬架相对于该支撑轨道的移动速度作为该第二参数。
在一些实施方案中,该系统还可包括第三传感器,该第三传感器联接到该第二链条或该第二线缆并且被配置为测量当推动该脚蹬架时施加到该第二链条或该第二线缆的张力,并且其中该DPU可被配置为确定由该脚蹬架接收的该推动动作作为施加到该第二链条或该第二线缆的该张力。
在一些实施方案中,该负载单元可包括飞轮,并且该第一链条或该第一线缆可通过嵌齿轮或滑轮联接到该飞轮,并且该系统还可包括第四传感器,该第四传感器设置在该嵌齿轮或该滑轮处并且被配置为测量该手柄相对于该负载单元的移动速度。
在一些实施方案中,该系统还可包括第五传感器,该第五传感器联接到该座椅并且被配置为测量该座椅相对于该支撑轨道的移动速度,其中该DPU可被配置为使用该手柄相对于该负载单元的该移动速度和该座椅相对于该支撑轨道的该移动速度来确定该手柄相对于该座椅的相对速度。
在一些实施方案中,该DPU可被配置为基于该第一参数和该第二参数来确定该关系作为该手柄上的该拉动动作与由该脚蹬架接收的该推动动作之间的比值。
在一些实施方案中,该系统还可包括通信连接,该通信连接被配置为将该DPU连接到设置在一个或多个其他划船机上的一个或多个传感器。
在一些实施方案中,该系统还可包括通信连接,该通信连接被配置为将该DPU连接到设置在另一个划船机上的相应DPU。
在一些实施方案中,该划船机可以是通过相应通信连接进行连接的多个划船机中的一个划船机,并且其中该DPU被配置为确定该手柄上的该拉动动作与由该脚蹬架接收的该推动动作之间的该关系的时间曲线。
在一些实施方案中,该划船机可以是机械地链接在一起的多个划船机中的一个划船机。
在一些实施方案中,该系统还可包括显示器,其中该DPU被配置为实时执行该确定并且实时显示该确定的结果。
本发明技术的另一个方面提供了一种提供在划船机上的实时表现反馈的计算机实现的方法,该划船机包括:负载单元,该负载单元联接到支撑轨道;座椅,该座椅可滑动地联接到该支撑轨道以用于支撑划手;手柄,该手柄联接到该负载单元并且被布置成通过在该手柄上的拉动动作相对于该负载单元移动;和脚蹬架,该脚蹬架联接到该支撑轨道并且被布置成接收该脚蹬架上的推动动作,该方法包括:测量指示该手柄上的该拉动动作的第一参数;测量指示由该脚蹬架接收的该推动动作的第二参数;以及基于该第一参数和该第二参数来实时确定该手柄上的该拉动动作与由该脚蹬架接收的该推动动作之间的关系。
在一些实施方案中,该手柄可借助于第一链条或第一线缆联接到该负载单元,并且测量该第一参数可包括测量当拉动该手柄时施加到该第一链条或该第一线缆的张力T
在一些实施方案中,该支撑轨道可安装在多个滚轮上,该多个滚轮被布置成沿一组导轨滑动,并且测量该第二参数可包括测量该划船机相对于地板的移动速度V
在一些实施方案中,该方法还可包括根据以下等式使用由该脚蹬架接收的该推动力F
在一些实施方案中,该方法还可包括:测量该手柄相对于该负载单元的移动速度V
在一些实施方案中,该方法还可包括根据以下等式基于该划手的质量M
在一些实施方案中,该脚蹬架可刚性地联接到该负载单元并且该负载单元通过多个滚轮可滑动地联接到该支撑轨道,并且测量该第二参数可包括测量该负载单元相对于该支撑轨道的移动速度V
在一些实施方案中,该方法还可包括根据以下等式使用由该脚蹬架接收的该推动力Ff和该负载单元的该移动速度V
在一些实施方案中,该脚蹬架可通过多个滚轮可滑动地联接到该支撑轨道并且借助于该第二链条或该第二线缆联接到该负载单元,其中该脚蹬架可被布置成沿该支撑轨道相对于该负载单元移动,其中测量该第二参数可包括测量该脚蹬架相对于该支撑轨道的移动速度V
在一些实施方案中,该方法还可包括测量当推动该脚蹬架时施加到该第二链条或该第二线缆的张力T
在一些实施方案中,该方法还可包括根据以下等式使用由该脚蹬架接收的该推动力T
在一些实施方案中,该方法还可包括:测量该座椅相对于世界坐标系的移动速度V
在一些实施方案中,该方法还可包括将该数值指标与对应于最佳行程曲线的参考进行比较。
在一些实施方案中,该方法还可包括:测量该座椅相对于该支撑轨道的移动速度;基于该划船机的该移动速度、该负载单元的该移动速度或该脚蹬架的该移动速度来确定该划手的脚的速度;以及使用该座椅的该移动速度和该划手的脚的该速度来确定该座椅相对于该划手的脚的该速度的相对速度,以提供划手的技术的指示。
在一些实施方案中,该方法还可包括测量从该座椅处于第一位置时到通过该手柄或该脚蹬架向该负载施加力时的持续时间,其中该第一位置可以是沿该支撑轨道该座椅最靠近该负载单元时的位置。
在一些实施方案中,该划船机可以是通过相应通信连接进行连接的一个或多个划船机,并且该方法还可包括确定该手柄上的该拉动动作与由该脚蹬架接收的该推动动作之间的该关系的时间曲线。
在一些实施方案中,该方法还可包括基于该第一参数和该第二参数来确定该手柄上的该拉动动作与由该脚蹬架接收的该推动动作之间的比值。
本发明技术的又一个方面提供了一种非暂态计算机可读介质,该非暂态计算机可读介质包括机器可读代码,该机器可读代码在由处理器执行时使得该处理器执行如上所述的方法。
本发明技术的再一个方面提供了一种用于测量往复运动链条中的张力的设备,该设备包括:联接基座,该联接基座被构造成将该设备联接到该链条;一个或多个棘爪,该一个或多个棘爪设置在该联接基座上,每个棘爪被构造成接合该链条中的链节;和一个或多个挠曲感测元件,该一个或多个挠曲感测元件安装在该联接基座上并且被配置为生成指示当该链条受到张力时施加在该联接基座上的挠曲力的输出信号。
附图说明
现在将参考附图描述本发明技术的实施方案,其中:
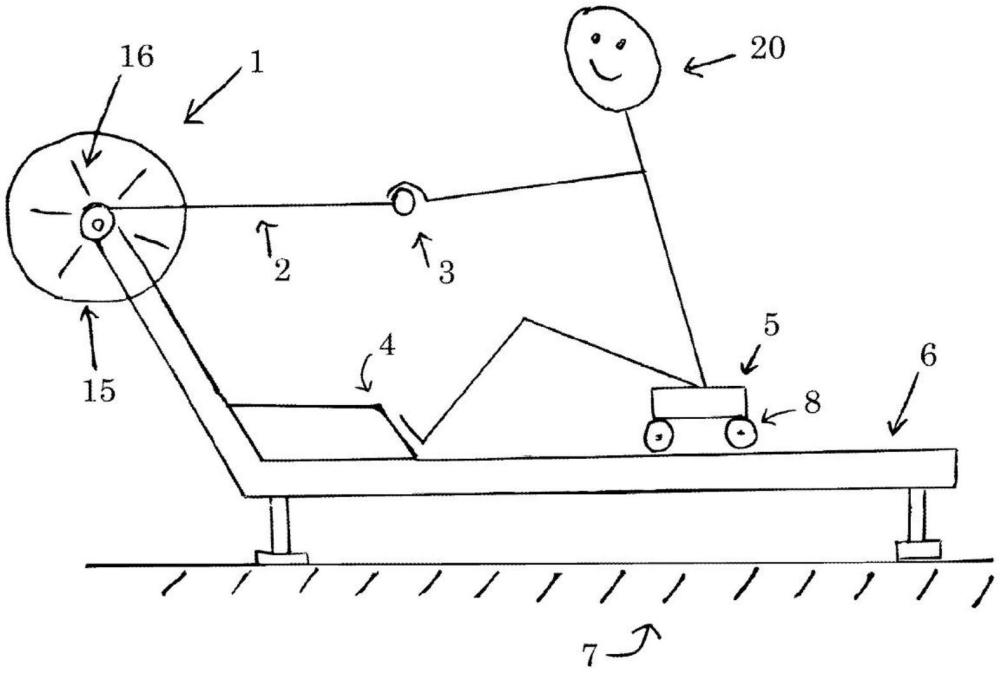
图1示出了固定到地板的典型划船机的基本特征的简化示意图,其中负载单元呈具有空气制动叶片的旋转飞轮的形式。
图2示出了附接到图1的典型划船机的指定传感器的位置,其中划船机现在安装在滑动基座上,使得划船机可相对于地板或“世界坐标系”移动。还示出了所提及的主要速度和力。
图3示出了附接到具有集成的滑动负载单元的划船机的指定传感器的位置,示出了所考虑的主要速度和力。
图4示出了附接到划船机的指定传感器的位置,其中负载单元固定在世界坐标系中,并且脚蹬架相对于该机器移动,再次示出了主要力和速度。
图5示出了可测量将手柄连接到负载单元的链条中的张力的传感器的基本特征。
图6示出了安装在划船机的手柄链条上的图5的链条张力传感器。
图7示出了数据处理单元(DPU)、指标选择单元和显示设备的示意性表示,其中DPU连接到来自根据实施方案的配备有传感器的一个或多个划船机的传感器。
具体实施方式
现在将概述特定划船技巧错误的一些示例以示出本发明技术可为之提供实时、定量反馈的划手的移动的各方面。
一种错误是划手在拉桨阶段的开始时用他们的腿部让他们的脚推压负载单元而未调动他们的“核心”肌肉以通过手柄将所生成的力有效地联接到负载单元,通俗地称为“拉桨时滑座移动过快(shooting the slide)”或“臀部后挤(bum shoving)”。这会导致在拉桨阶段的开始时,划船机的座椅,以及间接地还有划手的质心,比手柄移动得更快。
与“拉桨时滑座移动过快”相反,另一种错误是划手在抓握时过于用力地使用他们的背部肌肉打开他们的身体角度,导致手柄最初比他们的质心移动得更快。这有时被称为“抓握时上举(lifting atthe catch)”。
为了解决上述问题和限制,本发明技术提供了一种向划手提供实时定量反馈的方法和相关联装置,该反馈是被认为对划船效率而言重要的划手的移动的特定方面的选定指标的反馈。
在每个行程期间或者在每个行程完成时提供由本发明技术产生的反馈,使得划手可以实时修改他们的移动模式以努力改善选定指标的读数。教练可以通过在划手正在该机器上主动划船的同时向他们做出口头建议来促进该过程,并且当划手和教练发现改善指标的移动形式时,获得的即时反馈能让他们更容易地由所说的“肌肉记忆”来保持改善的移动的“感觉”。
教练或划手可以使用与该装置一起提供的软件来选择一个特定指标进行显示,然后在继续进行到另一个指标之前按要求花费足够多的时间来改善该指标,其中教练或划手不会在第一个指标得到定量改善之前就试图进行到纠正另一种错误。
所显示的指标的定量本质还允许客观地而不是教练主观地比较不同划手的技巧水平。这消除了教练在划手评价和团队选择中的任何偏见建议。
此外,指标的定量本质允许数据被容易地记录和回顾以评估划手从他们参与训练计划开始随时间推移的进步情况。
指标可能以对技巧水平进行量化和报告的方式导出,不只有如当前由传统划船机呈现的总功率输出。这允许当在真实的船中与更强大的对手对抗时,将不太强大的划手识别为潜在更快的划手,在选择划手以纳入团队船中时,这一特征特别有用。
本发明技术包括某种形式的电子数据处理单元或DPU,该电子数据处理单元或DPU可同时从一个或多个装配有本文所述的传感器的划船机获取数据。这允许实时反馈选定指标,这些选定指标量化多个划手使他们的移动同步得有多好。团队船的总速度非常依赖于该同步水平,并且使用该装置提供来自多于一个划手的同时实时反馈将允许技巧不太娴熟的划手实时修改他们的移动以努力匹配技巧更加娴熟的划手的移动。
特定划船方式的“最佳”行程曲线数据集也可以被预先编程到DPU中,使得所有队员可以在训练时段期间努力超向该最佳值实时修改他们的移动。最佳行程曲线可以从教练认为最接近地展示了期望的划船方式的个别划手获得,或者另选地,最佳行程曲线可以从数学模型中导出。
在图1中,划船机的负载单元1由飞轮15和链条或线缆2构成,该飞轮具有空气制动叶片16,该链条或线缆通常经由嵌齿轮或滑轮将划船机的手柄3连接到负载单元的飞轮。划手20坐在座椅5上,该座椅可以在滚轮8上沿划船机的座椅支撑轨道6自由地水平移动。划船机相对于世界坐标系7固定。
在图2中,图1的划手和划船机被示出为安装在滚轮9上,这些滚轮通常被限制为在导轨上运行,使得划船机仅可相对于世界坐标系7在一个水平方向上自由移动。连接到滚轮9中的任一个滚轮的传感器12测量组合的划船机和划手相对于世界坐标系7的移动。第二传感器10链接到嵌齿轮或滑轮并且测量手柄相对于负载单元的移动,该嵌齿轮或滑轮将手柄链条或线缆联接到负载单元的飞轮。第三传感器11链接到滑动座椅8的滚轮以测量座椅相对于座椅支撑轨道6的移动。力传感器13装配到手柄链条或线缆以测量该链条或线缆中的张力。
划手的质心在图2中被示出为位于14处,虽然该质心在行程期间随着划手的关节角度变化而相对于划手的身体略有移动。
在图2中,相对于世界坐标系7测量的速度用下标“w”表示,因此V
“T
由传感器12产生的测量值V
V
由传感器10测量的速度V
V
因此:
V
类似地,考虑由传感器11产生的测量值V
V
因此:
V
如果划手的质量为M
对作用于ergo的力应用牛顿第二定律,忽略座椅滚轮8处的摩擦力:
M
重新整理为:
F
类似地,仅考虑水平分量并且应用动量守恒:
M
并且重新整理为:
V
由手柄相对于座椅的相对速度V
V
如果划手在开始拉桨阶段时倾向于“拉桨时滑座移动过快”,则V
可从传感器导出的另一个有用指标是划手经由他们的腿部在脚蹬架上的功率P
P
P
DPU可以测量整个拉桨阶段的P
实验发现,测量划手的CM坐标系中的相对功率比值给出了划手是否正表现出先前描述的“拉桨时滑座移动过快”或“上举”错误的良好指示。
P
P
如前所述,DPU可以向划手和教练实时报告P
可以容易地从系统中导出的另一组指标是划手通过手柄和脚蹬架传递的冲量(即,动量的变化)的绝对量和相对量。
实验发现,在初始拉桨阶段期间在世界坐标系中,一部分能量从划手的腿部蹬动转移到他们的CM,然后,随着划手在接近拉桨阶段的中段和结束时增加手柄的力和速度,该“存储的”动能经由手柄转移到负载单元。这种效果也可以根据动量交换来量化。
上述划手的质量的速度与该机器之间的能量和动量的交换也被理解为发生在真实的船上,其中随着划手相对于水的速度减小,这种交换使船的水速度在接近行程的结束时加速。因此,能够实时量化这种效果是有利的,使得划手可以改善他们能够把划船机上的效果利用得有多好,然后使用他们在该机器上获得的本体感受努力在真实的船上复现该效果。
可以从系统中容易地获得的其他指标是在手柄处产生的力、功率和冲量的时间曲线,还有通过脚蹬架传递的对应曲线(参见例如,用于脚力和功率推导的等式4、等式7和等式9)。
在现有研究中实验发现,某些时间曲线指示有效的划船方式,因此DPU可以用这些示例性曲线来编程,使得划手可以再次使用匹配质量的实时定量指示来努力将他们的行程曲线与期望曲线匹配。对于这种类型的反馈,可以有利地使用某种形式的图形显示,该图形显示示出了与对照期望曲线重叠的划手的行程曲线。
实时查看选定指标如何随着划手在训练时段期间疲劳和/或随着划船强度增加而劣化也是非常有用的,因为这是有技巧的划手的重要特征,即他们在整个比赛持续时间中维持其技巧水平的能力。
在多个系统连接到DPU的情况下,如图7所示,DPU可以提供针对组队训练时段中多个划手之间的时间曲线的质量和稳定性的实时指标。一个此类量度是划手相对于彼此对他们各自的拉桨阶段的开始的时机把握可以有多接近;另一种是划手各自达到在手柄和脚蹬架处生成的力的峰值的时间有多接近,还有另一种是划手达到他们正通过手柄、脚蹬架任一者或两者传递到系统的冲量的特定百分比的时间有多接近。
为了便于上述团队协调训练,划船机可以机械地链接在一起,使得每个划手可以感觉到链接的组件的移动。然而,这意味着不能简单地从链接的划船机组件的加速度(即,通过等式4)导出每个个体的脚力,但是仍然可以从每个划手的手柄力和速度以及他们的座椅和CM速度的各个测量值导出其他指标。
适用于单个或多个系统的另一个有利特征在于,DPU可以实时测量并连续报告在时段持续时间期间每个划手正在达到的行程长度。行程长度是手柄相对于负载单元行进的距离,并且对于给定体型的划手,行程长度是划手的灵活性的量度。应当理解,在竞技性划船中,在整个比赛中维持一致的行程长度是重要的,因此在训练时段期间在划船机上具有行程长度的实时反馈非常有用,这使得划手和教练能够查看他们的行程长度是否正由于疲劳或由于划船强度增大而减小。
当多个划船机机械地链接在一起时,可以测量个体是否能够复现他们在独立使用该装置时可以实现的典型行程长度,因为划手在组合系统中划出最短行程长度是常见的,无论该系统是链接的划船机的形式还是实际的团队船的形式。
能够监测划手在每个行程中向负载单元传递的总功也是有用的,总功即手柄力和手柄位移在每个完整行程期间的积分,并且该指标可以在不参考脚力的情况下计算,因此对于机械地链接的划船机是可能的。
该系统的又一个优点在于,对于根据本发明实施方案配备的单独的或链接的划船机,通过手柄施加的峰值力,或者另选地行程中划手达到其总手柄冲量的特定百分比的点可以与手柄相对于该机器的位置精确相关,并且该信息可以有效地用于设置团队船的索具,使得每个划手施加对其体型而言最佳的输出。
对于单独的或链接的划船机,该系统还能够量化划手在行程的回桨阶段期间如何在划船机上移动,并且该信息还可以揭示某些技巧缺陷。一种此类缺陷是划手过快且不受控制地接近该机器上的抓握位置,即“回桨时滑座移动过快(rushing the slide)”。座椅相对于该机器的速度即座椅速度传感器输出V
当划手接近抓握位置时,脚蹬架上的力也可以用于导出划手正在单独的划船机上的回桨阶段期间把他们的移动控制得有多好的指标。
可以实时反馈的另一组有用指标涉及划手在行程的回桨阶段期间如何移动手柄。可以测量手柄相对于划手的速度,即(V
有时,技巧高度娴熟且配合良好的划手会采用这样一种划船方式:有意地使其CM的速度在接近抓握时加速,这允许他们利用其肌腱的弹性和神经肌肉“拉伸反射”反应而更有爆发力地“弹离”脚蹬架。这允许划手将他们在开始拉桨阶段之前在抓握位置处花费的时间减到最少,因为该位置通常是真实的船减速最多的位置。
可以使用由DPU单独计算和在团队训练时段中计算的适当反馈指标来实践上述技术。该技术的成功取决于在到达抓握位置之后很快准确地施加手柄力,因此,例如,系统可以报告时机把握质量指标以指示在个体到达抓握位置与开始拉桨阶段之间花费的持续时间,并且它可以提供指示在装备同时监测的两个或更多个个体之间这些时段重叠得有多好的另一个指标。
图3示出了附接到划船机的相关传感器,该划船机具有滑动负载单元1,该滑动负载单元可以与座椅5一起在滚轮18上的支撑轨道6上水平移动。旋转传感器17连接到滚轮18中的一个滚轮上,以测量负载单元相对于支撑轨道的移动,但是如前所述,在另选实施方案中,该移动可以通过除了旋转传感器之外的装置来测量。
本领域普通技术人员可以容易地看到,先前讨论的参数可以从在这种类型的划船机上指示的传感器导出;例如,等式5中的M
图4示出了附接到划船机的相关传感器,该划船机具有刚性地联接到支撑轨道6的负载单元1,该支撑轨道进而固定到地板,即世界坐标系7。脚蹬架4可以与座椅5一起在滚轮18上沿支撑轨道6水平移动。这里,划手的CM相对于世界坐标系保持相对静止,并且机构允许手柄和脚蹬架两者独立地移动以向负载单元传递功率。座椅移动传感器11测量座椅在支撑轨道6上的相对小的移动,使得可以在世界坐标系中准确地测量划手的CM的移动。传感器21测量脚蹬架相对于支撑轨道的移动,并且传感器19测量将滑动脚蹬架连接到负载单元的链条或线缆22中的张力T
在该实施方案中,必须从张力T
在先前描述的本发明技术的实施方案中,测量速度的传感器是旋转传感器,但是在其他实施方案中,相对移动可以由非旋转传感器测量,例如,磁性或光学线性编码器、或超声或激光位置传感器。
在其他实施方案中,将手柄联接到负载单元的链条或线缆中的张力可在负载单元自身中测量,例如通过测量飞轮的角加速度,或利用负载单元飞轮的轴承支撑件中或链条或线缆的任何导轮中的力感测负载传感器。类似地,将图4的划船机的移动脚蹬架联接到负载单元的链条或线缆中的张力可通过此类另选装置来测量。
本发明技术的显著优点在于,在不需要将力传感器放置在划手的脚与脚蹬架之间的情况下精确地确定水平脚力F
图5示出了适用于本发明技术的链条张力传感器的透视图,并且图6示出了滚子链条30如何附接到张力传感器:通过链条扭结并且钩挂在联接构件(或基座)31的棘爪32上,使得链条张力通过联接构件传递。连接构件通常会由钢制成,并且当通过链条施加张力时,构件将与施加的张力的量近似线性成比例地挠曲,只要张力不接近制成构件的材料的弹性极限。
优选地,一对挠曲感测元件33安装在联接构件31的相对侧上,以使当配置在电桥电路中时生成的挠曲信号加倍,并且还提供基板材料的热膨胀的温度补偿,如本领域所公知的。挠曲传感器通常是应变仪,虽然其他设备诸如压电元件也可以用于产生与连接构件经受的挠曲程度成比例的电信号。
经由电线35连接到挠曲传感器的电子电路34放大其输出信号并且将输出信号传输到DPU,可能地经由附接到划船机的柔性盘绕线缆传输使得手柄可自由移动,或者另选地通过无线装置,诸如无线电、红外或超声传输。来自挠曲元件的经放大的模拟信号可以是由电子电路调节的信号,以提高线性度并校正偏移,并且该信号还可以在传输到DPU之前被数字化。
所示的链条张力传感器的显著优点在于,该传感器可容易地装配到标准划船机链条上并从链条上移除,而不需要移除手柄或拆分链条,而如果采用常规负载传感器则需要移除手柄或拆分链条。所示的链条张力传感器对于系统要求而言非常精确并且制造简单。尽管已经在划船机的上下文中描述了链条张力传感器,但是本领域技术人员将清楚的是,链条张力传感器可以与任何往复运动链条一起使用。
图7示出了从一个或更多个划船机43到DPU 40的传感器连接、用于选择要反馈给划手的指标的输入设备41和反馈输出设备42的示意性表示。先前已经提到将实时信息反馈给划手的一些可能的方法,包括字母数字和/或图形显示、彩色光、可听音调、或触觉设备,诸如振动发生器或电皮肤刺激。可以设计其他选项;所使用的确切方法不是本发明技术的基本特征。
类似地,指标选择设备41不是本发明技术的基本特征,并且该设备可以包括按钮、键盘、触摸板或甚至语音识别,使得划手可以在仍在划船的同时改变反馈指标。
本发明技术的另一个优点在于,DPU产生选定指标所需的数据可以从具有数量最少且相对低成本的附加装置的常规划船机获得。例如,图2中所示的滑动基座的具体实施已经被制造为用于常用划船机的配件,并且本文中确定的附加的旋转传感器和链条力传感器可以以低成本制造并且由技巧相当不娴熟的人回顾性地添加到现有划船机和滑动基座。
- 光谱分析的测量装置和在使用光谱分析的测量装置的情况下用于分析介质的方法
- 用于测量熔融金属温度的温度测量装置与温度测量方法
- 操作用于测量在测量管中介质的流速或体积流量的磁感应流量测量装置的方法
- 一种用于测量运动颗粒粒径的全息实时测量方法及装置
- 用于规划船舶载有的装置的电力消耗的系统和方法
- 用于散射光测量仪的测试装置,用于散射光测量仪的测试装置的制造方法和用于检验散射光测量仪的方法