水冷壁爬壁机器人定位方法
文献发布时间:2023-06-19 19:40:14
技术领域
本申请涉及锅炉水冷壁检测的技术领域,尤其是涉及一种水冷壁爬壁机器人定位方法。
背景技术
水冷壁是锅炉的主要受热部分,它由数排钢管组成,分布于锅炉炉膛的四周,其换热性能的好坏直接影响锅炉的生产效率。现阶段,为了提高水冷壁的换热效果、适当的降低炉墙的温度、更好的保护炉墙,水冷壁均采用膜式水冷壁结构,即将许多鳍片管沿纵向依次焊接起来,构成整体的受热面,使炉膛内壁四周被一层整块的水冷壁膜严密包围。
由于电站锅炉中水冷壁常年运行,尤其是工作负荷高时,物料流化量大,在循环流动的物料冲刷下,锅炉水冷壁管容易发生磨损和腐蚀,尤其在锅炉防磨弯处、水冷壁出烟口、屏式过热器底部等位置水冷壁管被磨损的情况非常严重,这将给锅炉运行造成严重的安全隐患。
以往通过爬壁机器人进行水冷壁磨损检测,即爬壁机器人在锅炉水冷壁上沿管壁竖直方向自由行走,利用爬壁机器人上设置的超声波测厚仪对水冷壁管进行厚度检测;测距仪测量爬壁机器人攀爬的实际高度,当超声波测厚仪测得厚度不符合标准时,对磨损点进行定位。
针对上述中的相关技术,发明人发现存在有以下缺陷:利用测距仪测量爬壁机器人的高度后,仍需工作人员对所有水冷壁管所测得的高度位置进行二次检测,使得检测周期较长。
发明内容
为了减少爬壁机器人的检测周期,本申请提供一种水冷壁爬壁机器人定位方法。
本申请提供的一种水冷壁爬壁机器人定位方法,采用如下的技术方案:
一种水冷壁爬壁机器人定位方法,包括:
获取激光点云数据、左侧初始管号P0
根据第一帧激光点云数据、左侧初始管号P0
将所述左侧线激光中值或右侧线激光中值分别与预设阈值进行比较,并根据比较结果得到对应的左侧线激光管号计数状态与右侧线激光管号计数状态;
根据所述左侧初始管号P0
根据当前帧激光点云数据、所述左侧线激光中点在管壁上投影所对应的管号P1以及右侧线激光中点在管壁上投影所对应的管号P2,得到左侧线激光和右侧线激光分别照射到的管的中轴位置与管对应的管号,或,鳍片的中轴位置与鳍片对应的鳍片号;
根据所述管的中轴位置与管对应的管号,或,鳍片的中轴位置与鳍片对应的鳍片号,计算左侧线激光和右侧线激光所照射到的管对应的管号与偏置量。
通过采用上述技术方案,在爬壁机器人爬壁机器人进行水冷壁磨损检测的过程中,利用激光器对磨损的水冷壁进行横向定位,在提高检测准性的同时,有效减少检测周期。
可选的,所述根据所述比较结果得到对应的左侧线激光管号计数状态与右侧线激光管号计数状态具体包括:
在所述左侧线激光中点或右侧线激光中点大于预设阈值的情况下,则左侧线激光管号计数状态或右侧线激光管号计数状态为1;
在所述左侧线激光中点或右侧线激光中点小于预设阈值的情况下,则左侧线激光管号计数状态或右侧线激光管号计数状态为0。
可选的,在所述左侧线激光中点或右侧线激光中点小于预设阈值的情况下,还包括:获取左侧线激光或右侧线激光照射到的鳍片中轴所对应的数值,记为
可选的,所述对激光点云数据进行预处理,得到有效激光点云数据具体包括:
根据左侧线激光或右侧线激光所照射的点,以两端边界为起始点,分别找出最左侧和最右侧有效值所对应的数值,并构成有效值区间;
从所述有效值区间中找出无效值区间;
在所述无效值区间所对应的长度小于预设的最小长度的情况下,则将无效值区间两端的有效值用线段连接,以作为激光点云数据;
在所述无效值区间所对应的长度大于预设的最大长度的情况下,则这一帧激光点云数据无法作为有效输入。
可选的,根据所述左侧初始管号P0
根据所述左侧初始管号P0
在所述左侧线激光管号计数状态或右侧线激光管号计数状态为1,且第二左侧线激光中值或第二右侧线激光中值小于预设阈值的情况下,所述左侧线激光管号计数状态或右侧线激光管号计数状态迁移至0,并得到左侧线激光第一数值与左侧线激光第二数值或右侧线激光第一数值与右侧线激光第二数值;
在所述左侧线激光第一数值或右侧线激光第一数值大于预设阈值且左侧线激光第二数值或右侧线激光第二数值小于预设阈值的情况下,则左侧管号P0
在所述左侧线激光第一数值或右侧线激光第一数值小于预设阈值且左侧线激光第二数值或右侧线激光第二数值大于第二数值的情况下,则则左侧管号P0
或,
在所述左侧线激光管号计数状态或右侧线激光管号计数状态为0,且第二左侧线激光中值或第二右侧线激光中值大于预设阈值的情况下,所述左侧线激光管号计数状态或右侧线激光管号计数状态迁移至1,并得到左侧线激光第一数值与左侧线激光第二数值或右侧线激光第一数值与右侧线激光第二数值;
在所述左侧线激光第一数值或右侧线激光第一数值大于预设阈值且左侧线激光第二数值或右侧线激光第二数值小于预设阈值的情况下,则左侧管号P0
在所述左侧线激光第一数值或右侧线激光第一数值小于预设阈值且左侧线激光第二数值或右侧线激光第二数值大于第二数值的情况下,则则左侧管号P0
可选的,所述根据当前帧激光点云数据,得到左侧线激光和右侧线激光照射到的管的中轴线及鳍片中轴线位置具体包括:
根据当前帧激光点云数据,获取有效高度值;
根据所述有效高度值,得到对应管中轴样本点或鳍片中轴样本点;
对所述有效高度值下的所有管中轴样本点取均值,得到管中轴数据值;或,对所述有效高度值下的所有鳍片中轴样本点取均值,得到鳍片中轴数据值;
在所述鳍片中轴数据值存在的情况下,若所述左侧线激光管号计数状态或所述右侧线激光管号计数状态为0,则线激光照射到鳍片所对应的鳍片号为P1;
在所述鳍片中轴数据值存在的情况下,若所述左侧线激光管号计数状态或所述右侧线激光管号计数状态为1,则判断鳍片中轴数据值是否大于预设中值,如果是,则线激光照射到鳍片所对应的鳍片号为P1+x;如果否,则线激光照射到鳍片所对应的鳍片号为P1-x;
在所述管中轴数据值存在的情况下,若所述左侧线激光管号计数状态或所述右侧线激光管号计数状态为1,则线激光照射到管所对应的管号为P1;
在所述管中轴数据值存在的情况下,若所述左侧线激光管号计数状态或所述右侧线激光管号计数状态为0,则判断管中轴数据值是否大于预设中值,如果是,则线激光照射到管所对应的管号为P1+x;如果否,则线激光照射到管所对应的管号为P1-x。
可选的,所述根据当前帧激光点云数据获取有效高度值具体包括:
根据当前帧激光点云数据,在预设高度值下找出最接近对应高度值的激光点,作为预设高度值下的等高点;
获取具有两个以上所述等高点的预设高度值,作为有效高度值。
可选的,所述根据所述有效高度值,得到对应管中轴样本点或鳍片中轴样本点具体包括:
将所述有效高度值下的第i个左侧激光点对应的数值,确定为xl(h)[i];第j个右侧激光点对应的数值,确定为xr(h)[j];
将所述有效高度值下的第i个左侧激光点对应的数值与第i+1个左侧激光点对应的数值取均值,得到左侧激光点数据值;
判断所述左侧激光点数据值是否大于预设峰值,如果是,则确定为管中轴样本点;
或,
判断所述左侧激光点数据值是否小于预设谷值,如果是,则确定为鳍片中轴样本点。
综上所述,本申请包括以下至少一种有益技术效果:
在爬壁机器人爬壁机器人进行水冷壁磨损检测的过程中,利用激光器对磨损的水冷壁进行横向定位,在提高检测准性的同时,有效减少检测周期。
附图说明
图1是本申请其中一实施例示出的水冷壁爬壁机器人定位系统的结构示意图。
图2是本申请其中一实施例示出的水冷壁爬壁机器人定位系统的另一结构示意图。
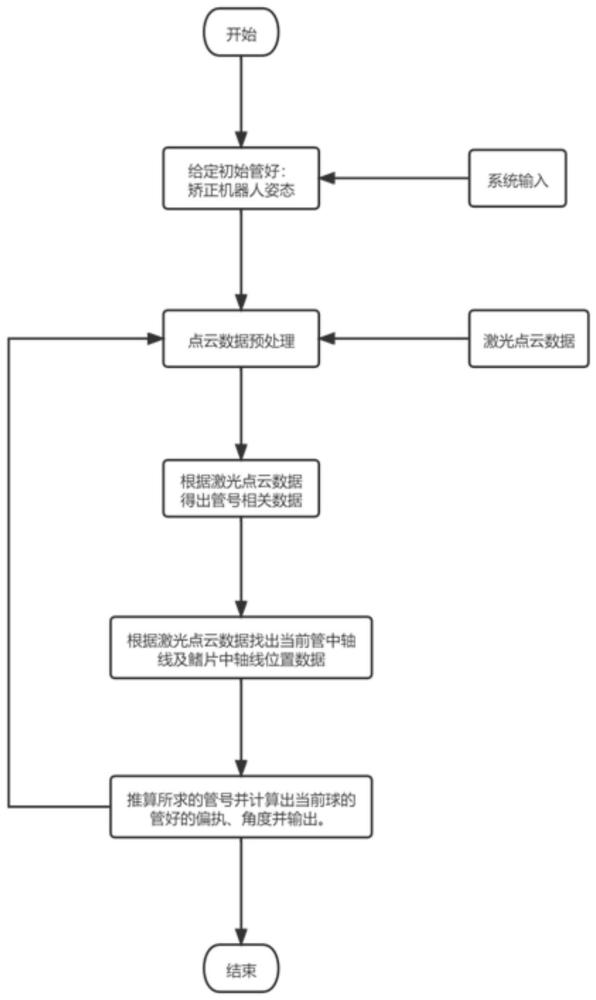
图3是本申请其中一实施例示出的水冷壁爬壁机器人定位方法的流程图。
图4是本申请其中一实施例示出的水冷壁爬壁机器人定位方法的另一流程图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下通过附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本申请,并不用于限定本申请。
需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向。
在爬壁机器人进行水冷壁磨损检测时,即利用爬壁机器人上设置的超声波测厚仪对水冷壁管进行厚度检测的过程中;当超声波测厚仪测得厚度不符合标准时,测距仪测量爬壁机器人攀爬的实际高度,对磨损点的高度进行定位。但是确定磨损点的高度后,仍需工作人员对所有水冷壁管进行二次检测,以确定磨损点的横向位置。
为了减少检测周期,提高检测精度,本申请实施例公开一种水冷壁爬壁机器人定位系统。
作为水冷壁爬壁机器人定位系统的一种实施方式,在爬壁机器人上设置两个以上的激光器;当超声波测厚仪测得厚度不符合标准时,测距仪测量爬壁机器人攀爬的实际高度,同时利用激光器精确定位爬壁机器人在水冷壁上的横向位置,从而有助于对磨损点的位置进行精确定位,无需工作人员进行二次检测。
具体的,本实施例采用两个激光器作为数据源,两个激光器共线排布,且两个激光器相邻边界具有间距,有助于提高检测精度。
基于上述水冷壁爬壁机器人定位系统,本申请实施例还公开了一种水冷壁爬壁机器人定位方法。
如图1和图2所示,由于膜式水冷壁是指由管子和鳍片拼排焊成的气密管屏所组成的水冷壁。为了确定磨损点的横向位置,以鳍片中轴为界,规定水冷壁上各根管的管号。在本实施例中,按照从左向右的顺序,依次对水冷壁上各根管进行标号;若在2号管和3号管之间的鳍片,则该鳍片的中轴左侧部分属于2号管,中轴右侧部分属于3号管。为了算法运算便利,以鳍片本身为界,规定水冷壁上各鳍片的鳍片号。
作为定位方法的一种实施方式,如图3和图4所示,包括以下步骤:100,获取激光点云数据、左侧初始管号P0
具体的,由激光器作为发射光源,对水冷壁进行密集采样,以产生高精度的x,y,z测量值,能生成可通过ArcGIS进行管理、显示、分析以及共享的离散多点云数据集,即激光点云数据。
200,根据第一帧激光点云数据、左侧初始管号P0
具体的,左侧线激光中点和右侧线激光中点根据激光器的点数确定。例如激光器的单条线激光为1600个点,则左侧线激光中点和右侧线激光中点均为800;其中左侧线激光中值为l[800],右侧线激光中值为r[800]。根据第一帧激光点云数据、左侧初始管号P0
300,将左侧线激光中值或右侧线激光中值分别与预设阈值进行比较,并根据比较结果得到对应的左侧线激光管号计数状态与右侧线激光管号计数状态;其中,预设阈值根据膜式水冷壁上管子的规格设置。
400,根据左侧初始管号P0
500,根据当前帧激光点云数据、所述左侧线激光中点在管壁上投影所对应的管号P1以及右侧线激光中点在管壁上投影所对应的管号P2,得到左侧线激光和右侧线激光分别照射到的管的中轴位置与管对应的管号,或,鳍片的中轴位置与鳍片对应的鳍片号。
600,根据所述管的中轴位置与管对应的管号,或,鳍片的中轴位置与鳍片对应的鳍片号,计算左侧线激光和右侧线激光所照射到的管对应的管号与偏置量。
其中,步骤300中根据比较结果得到对应的左侧线激光管号计数状态与右侧线激光管号计数状态,如图2所示,具体包括:
301,在左侧线激光中点或右侧线激光中点大于预设阈值的情况下,则左侧线激光管号计数状态或右侧线激光管号计数状态为1;左侧初始管号P0
302,在左侧线激光中点或右侧线激光中点小于预设阈值的情况下,则左侧线激光管号计数状态或右侧线激光管号计数状态为0;并获取左侧线激光或右侧线激光照射到的鳍片中轴所对应的数值,记为
另外,当激光点由于某种原因无法完成测距时,该激光点的输出为无效值。由于线激光数据会出现无效值区间,若置之不理,则会显著影响运算结果。故在每一帧激光点云数据作为输入的算法运算前,对激光点云数据进行预处理。
作为定位方法的一种实施方式,还包括:对激光点云数据进行预处理,得到有效激光点云数据。
其中,对激光点云数据进行预处理得到有效激光点云数据,具体包括:
根据左侧线激光或右侧线激光所照射的点,以两端边界为起始点,分别找出最左侧和最右侧有效值所对应的数值,并构成有效值区间;
从所述有效值区间中找出无效值区间;
在所述无效值区间所对应的长度小于预设的最小长度的情况下,则将无效值区间两端的有效值用线段连接,以作为激光点云数据;
在所述无效值区间所对应的长度大于预设的最大长度的情况下,则这一帧激光点云数据无法作为有效输入。
具体的,在有效值区间中找出所有无效值区间,若无效值区间较小,则将无效值区间两端的有效值用线段连接,以当做真实激光点云数据;若无效值区间过大,则说明这一帧激光点云数据由于某种原因数据一场,无法作为算法有效输入。
另外,步骤400中根据左侧初始管号P0
402,在所述左侧线激光管号计数状态或右侧线激光管号计数状态为1,且第二左侧线激光中值或第二右侧线激光中值小于预设阈值的情况下,所述左侧线激光管号计数状态或右侧线激光管号计数状态迁移至0,并得到左侧线激光第一数值与左侧线激光第二数值或右侧线激光第一数值与右侧线激光第二数值。
403,在所述左侧线激光第一数值或右侧线激光第一数值大于预设阈值且左侧线激光第二数值或右侧线激光第二数值小于预设阈值的情况下,则左侧管号P0
在所述左侧线激光第一数值或右侧线激光第一数值小于预设阈值且左侧线激光第二数值或右侧线激光第二数值大于第二数值的情况下,则则左侧管号P0
或,
404,在所述左侧线激光管号计数状态或右侧线激光管号计数状态为0,且第二左侧线激光中值或第二右侧线激光中值大于预设阈值的情况下,所述左侧线激光管号计数状态或右侧线激光管号计数状态迁移至1,并得到左侧线激光第一数值与左侧线激光第二数值或右侧线激光第一数值与右侧线激光第二数值。
405,在所述左侧线激光第一数值或右侧线激光第一数值大于预设阈值且左侧线激光第二数值或右侧线激光第二数值小于预设阈值的情况下,则左侧管号P0
在所述左侧线激光第一数值或右侧线激光第一数值小于预设阈值且左侧线激光第二数值或右侧线激光第二数值大于第二数值的情况下,则则左侧管号P0
步骤500中根据当前帧激光点云数据,得到左侧线激光和右侧线激光照射到的管的中轴线及鳍片中轴线位置,具体包括:
1.根据当前帧激光点云数据,获取有效高度值。
其中,步骤501具体包括:
根据当前帧激光点云数据,在预设高度值下找出最接近对应高度值的激光点,作为预设高度值下的等高点;
获取具有两个以上所述等高点的预设高度值,作为有效高度值。
502,根据所述有效高度值,得到对应管中轴样本点或鳍片中轴样本点。
其中,步骤502具体包括:
将所述有效高度值下的第i个左侧激光点对应的数值,确定为xl(h)[i];第j个右侧激光点对应的数值,确定为xr(h)[j];
将所述有效高度值下的第i个左侧激光点对应的数值与第i+1个左侧激光点对应的数值取均值,得到左侧激光点数据值;
判断所述左侧激光点数据值是否大于预设峰值,如果是,则确定为管中轴样本点;
或,
判断所述左侧激光点数据值是否小于预设谷值,如果是,则确定为鳍片中轴样本点。
503,对所述有效高度值下的所有管中轴样本点取均值,得到管中轴数据值;或,对所述有效高度值下的所有鳍片中轴样本点取均值,得到鳍片中轴数据值;
504,在所述鳍片中轴数据值存在的情况下,若所述左侧线激光管号计数状态或所述右侧线激光管号计数状态为0,则线激光照射到鳍片所对应的鳍片号为P1;
505,在所述鳍片中轴数据值存在的情况下,若所述左侧线激光管号计数状态或所述右侧线激光管号计数状态为1,则判断鳍片中轴数据值是否大于预设中值,如果是,则线激光照射到鳍片所对应的鳍片号为P1+x;如果否,则线激光照射到鳍片所对应的鳍片号为P1-x;506,在所述管中轴数据值存在的情况下,若所述左侧线激光管号计数状态或所述右侧线激光管号计数状态为1,则线激光照射到管所对应的管号为P1;
507,在所述管中轴数据值存在的情况下,若所述左侧线激光管号计数状态或所述右侧线激光管号计数状态为0,则判断管中轴数据值是否大于预设中值,如果是,则线激光照射到管所对应的管号为P1+x;如果否,则线激光照射到管所对应的管号为P1-x。
若
若
若
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 电磁驱动爬壁机器人模块、爬壁机器人及其运动方法
- 一种基于图像信息的水冷壁爬壁机器人定位方法
- 利用超声波测距仪定位的水冷壁爬壁机器人