多电机控制方法和系统
文献发布时间:2024-01-17 01:26:37
技术领域
本发明属于工程机械技术领域,具体涉及多电机控制方法和系统。
背景技术
工程机械领域的新能源旋挖钻机、强夯机等逐步开始推广使用,工程机械由于具有作业负载大、和作业强度高的特点,同时由于超大型高效电机的发展并不成熟,其主作业部件经常会采用多套小型化电机共同驱动,例如动力头采用两个或三个电机共同驱动、主卷扬采用两个电机共同驱动等。目前市场上的纯电动、混合动力旋挖钻机或强夯机等工程机械的主作业部件均采用此种多电机共同驱动的方案,此种方案存在以下缺点:①对于采用平均分配扭矩控制方案的多电机系统,多个电机同时工作并根据负载需求平均分配扭矩,在低负载、低扭矩需求时,每个电机的驱动或发电工作效率低,能耗差;②对于采用非平均分配扭矩控制方案的多电机系统,存在每个电机的负载不同,进而使不同电机寿命表现不同,不能够时整机系统寿命最大化,即经常大负载作业的电机以及连接的齿轮机构寿命短,而小负载的电机及其连接的齿轮机构寿命长。
发明内容
第一方面,本发明的目的在于提供一种多电机控制方法和一种动力系统,用以解决现有技术中电机工作效率低,能耗差的问题。
第二方面,本发明的目的在于提供一种非平均分配扭矩式多电机控制方法和一种多电机动力系统,用以解决现有技术中电机负载差别大,导致的电机寿命长短不一致的问题。
为解决上述技术问题,本发明所提供的技术方案以及技术方案对应的有益效果如下:
本发明的一种多电机控制方法,包括以下步骤:
1)与至少两个电机驱动连接的主作业部件工作时,确定主作业部件的功率落入的功率分段;
2)依据功率分段与电机数量对应关系,确定与依据落入的功率分段所对应的电机数量,依据确定的电机数量控制对应数量的电机执行驱动作业;
所述功率分段的总段数等于电机总数,且每个功率分段对应的电机数量均不同;对于每个功率分段均满足本分段的上限值小于等于本分段对应数量的所有电机功率之和。
上述技术方案的有益效果为:本发明依据电机总数划分对应数量的功率分段,每个分段使用的电机数量不同,从而根据主作业部件的功率需求,选择该需求对应的功率分段,确定该主作业部件使用的电机数量。本发明根据负载需求控制参与驱动电机的个数,尤其是在低负载、低扭矩需求时,通过降低参与电机的个数,使电机工作在高效区,降低整机能耗,提升可靠性,有效改善电机作业效率。
进一步地,每个电机额定功率均相等,第i个功率分段以及第i个功率分段对应使用的目标电机的数量m
(i-1)*P
其中,i为第i个功率分段,n≥i>0,n为电机总数,P
进一步地,步骤1)中所述主作业部件的功率为:主作业部件的实时功率或者主作业部件的设定周期内的平均功率。
进一步地,在主作业部件首次启动作业时,所有电机按照平均分配扭矩/功率的方式启动作业。
进一步地,步骤2)中需要从所有电机中选取对应数量的电机以使选取的电机执行驱动作业,选取方式包括使用固定电机对象方式和使用电机轮换交替方式。
本发明的一种动力系统,包括电机控制器、电能供给装置、多个电机和至少一个主作业部件,所述主作业部件与至少两个电机驱动连接;所述电能供给装置供电连接电机控制器,电机控制器与所有电机均连接;所述电机控制器用于执行计算机程序以依据本发明的一种多电机控制方法实现对所述主作业部件对应的所有电机的控制。
上述技术方案的有益效果为:本发明依据电机总数划分对应数量的功率分段,每个分段使用的电机数量不同,从而根据主作业部件的功率需求,选择该需求对应的功率分段,确定该主作业部件使用的电机数量。本发明根据负载需求控制参与驱动电机的个数,尤其是在低负载、低扭矩需求时,通过降低参与电机的个数,使电机工作在高效区,降低整机能耗,提升可靠性,有效改善电机作业效率。
本发明的一种非平均分配扭矩式多电机控制方法,包括以下步骤:
与至少两个电机驱动连接的主作业部件工作时,依据按照一定执行顺序设置的电机组合方式、以及由一种电机组合切换至下一种电机组合的切换条件,控制相应电机对主作业部件执行驱动作业;
所述执行顺序、电机组合方式和切换条件依据电机的工作时间等效或者寿命负载率等效规则设定。
上述技术方案的有益效果为:本发明根据电机负载作业时间,通过周期性的交替工作,避免个别电机过度使用,从而延长电机及传动系统的寿命,使整机系统寿命最大化,提高可靠性。
进一步地,所述寿命负载率依据电机扭矩负荷率与工作时间计算得到,或者参照等效疲劳寿命计算方法得到。
进一步地,所述切换条件为电机组合的作业时长达到切换阈值,所述切换阈值为执行驱动作业的电机组合的本循环周期的设定工作时长。
进一步地,当前执行作业的电机组合的工作时长通过实时与切换阈值对比的方式判断是否达到切换阈值;
或者当前执行作业的电机组合的工作时长通过依据固定周期与切换阈值对比的方式判断是否达到切换阈值。
进一步地,当满足切换条件由一种电机组合切换至下一种电机组合时采用立刻执行切换动作的方式切换,或者采用延迟设定周期后执行切换动作的方式切换。
本发明的一种多电机动力系统,其特征在于:包括电机控制器、电能供给装置、多个电机和至少一个主作业部件,所述主作业部件与至少两个电机驱动连接;所述电能供给装置供电连接电机控制器,电机控制器与所有电机均连接;所述电能供给装置用于为电机供电;所述电机控制器用于执行计算机程序以依据本发明的一种非平均分配扭矩式多电机控制方法实现对所述主作业部件对应的所有电机的控制。
上述技术方案的有益效果为:本发明根据电机负载作业时间,通过周期性的交替工作,避免个别电机过度使用,从而延长电机及传动系统的寿命,使整机系统寿命最大化,提高可靠性。
附图说明
图1是本发明的一种动力系统的系统结构示意图;
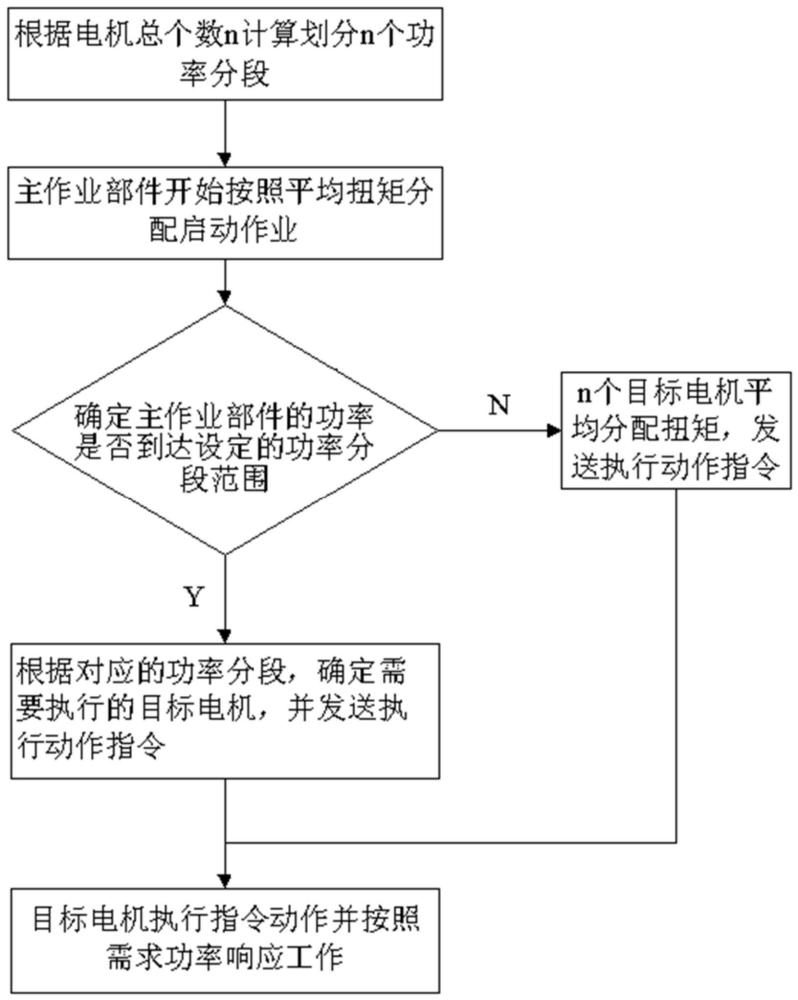
图2是本发明的多电机控制方法流程图;
图3是本发明的一种非平均分配扭矩式多电机控制方法流程图。
图中:1.第一主作业部件;2.第二主作业部件;1A.第一电机;1B.第二电机;2A.第三电机;2B.第四电机;2C.第五电机;3.电机控制器;4.电能供给装置。
具体实施方式
本发明的目的在于提供多电机控制方法和系统,用于解决目前的新能源工程机械多电机工作的能耗和可靠性问题。针对采用平均分配扭矩控制方案的多电机动力系统,采用作业功率需求大小的梯度识别,依据驱动电机的总个数对需求功率进行对应个数的功率梯度划分,进而根据不同功率梯度采用单电机、双电机或多电机共同驱动方案;针对采用非平均分配扭矩控制方案的多电机动力系统,采用时间周期或累计作业计时进行划分,到达设定时间或累计作业计时满周期后,进行主副作业电机的交换控制。该多电机优化控制方案可有效改善电机作业效率,提升能耗,同时提升系统寿命及可靠性。
为了使本发明的目的、技术方案及优点更加清楚明了,以下结合附图及实施例,对本发明进行进一步详细说明。
一种动力系统实施例:
本发明一种动力系统的实施例,如图1所示,包括第一主作业部件1,第二主作业部件2,驱动第一主作业部件1的第一电机1A和第二电机1B,驱动第一主作业部件2的第三电机2A、第四电机2B、第五电机2C,电机控制器3,电能供给装置4。
第一主作业部件1、第二主作业部件2可以根据工程机械的不同机型进行区分,均对应用于作业的部件(例如动力头、主卷扬),可以是一个也可以是多个;每一个主作业部件至少是由两个及两个以上的电机共同驱动,例如图1中的第一电机1A和第二电机1B驱动第一主作业部件1,第三电机2A、第四电机2B、第五电机2C驱动第二主作业部件2;电能供给装置4可以是动力电池、电容等能量存储装置,也可以是増程发电机组、外接电网供电装置。电机控制器,与所有电机、电能供给装置连接,电能供给装置用于为电机供电。电机控制器3可以是集成式多电机控制器,也可以是由多个单电机控制器组成。集成式多电机控制器包括为1个控制器连接多个电机,该控制器用于控制该多个电机,由该集成式电机控制器向各个电机发送控制命令。多个单电机控制器控制可以为一个控制器控制一个电机,多个控制器之间相互通信。电机控制器用于执行计算机程序以依据本发明的一种多电机控制方法实现对主作业部件对应的所有电机的控制。本实施例中,电机控制器用于执行计算机程序以依据本发明的一种多电机控制方法实现对第一主作业部件1对应的第一电机1A和电机第二1B的控制,或者实现对第二主作业部件2对应的第三电机2A、第四电机2B、和第五电机2C的控制。
下面对本发明的一种多电机控制方法进行详细介绍,具体步骤如图2所示。
对于平均分配扭矩控制方案的一种多电机控制方法,对作业的功率需求进行识别,根据电机个数及单个电机的能力划分需求功率段,然后根据当前需求功率,进行相应的电机适配,进而根据不同功率梯度采用单电机、双电机或多电机共同驱动方案。
采用平均分配扭矩控制方案的一种多电机控制方法步骤如下:
步骤110,根据电机总个数n计算划分n个功率分段。
具体的,按照驱动主作业部件的电机个数,依据每个电机的扭矩或功率能力,进行功率切片分段,分段个数与电机个数一致,但不限定分段的功率必须完全与电机功率等同,小于电机功率也是可行的。
步骤120,主作业部件开始按照平均扭矩分配启动作业。
具体的,在主作业部件首次启动作业时,按照平均分配扭矩的方式启动全部电机作业。此首次启动作业的判定可以是系统首次上电,也可以是按照设定策略的识别进行判定。
步骤130,确定主作业部件的功率是否到达设定的功率分段范围。此功率可以是对电机的实际功率进行判断,也可以是对目标指令需求功率的判断。
具体的,判定主作业部件的功率是否达到设定的功率分段范围,此判断可以是对电机的实际功率进行判断,也可以是对目标指令需求功率的判断。若选择实际功率进行判断,则此判断可以是主作业部件的实时功率判断也可以是设定周期累计平均功率判断。
步骤140,n个目标电机平均分配扭矩,发送执行动作指令:
具体的,根据需求平均分配电机扭矩,并向各电机发送扭矩或功率指令。
步骤150,根据对应的功率分段,确定需要执行的目标电机,并发送执行动作指令:
具体的,电机功率均相等且分段长度等于单个电机的功率大小,功率的划分及判断执行作业的数量可以按如下操作执行:
0≤主作业部件功率≤最大功率/n时,1个电机驱动;
最大功率/n<主作业部件功率≤2*最大功率/n时,2个电机驱动;
…
(n-2)*最大功率/n<主作业部件功率≤(n-1)最大功率/n时,n-1个电机驱动。
在上述需要执行的电机中,对于指派执行动作的某个电机或某几个电机,其指派规则可以是固定电机对象,也可以是轮换交替的。其中,固定电机对象的指派规则包括:为每个分段设定固定的电机,比如,有A、B、C三个电机,若需要1个电机执行作业时固定使用A电机,若需要2个电机执行作业时固定使用电机B和电机C,若需要3个电机执行作业时固定使用A电机、B电机和C电机。轮换交替的指派规则包括:按照时间或者其他标准轮换交替使用电机,比如,在X时段,使用A电机和B电机,在Y时段,使用B电机和C电机。
若电机的功率P均相等且分段长度L小于单个电机的功率大小,功率的划分及判断执行作业的数量可以按如下操作执行,n为电机总数量:
0≤主作业部件功率≤L时,1个电机驱动;
L<主作业部件功率≤2*L时,2个电机驱动;
…
(n-2)*L<主作业部件功率≤(n-1)L时,n-1个电机驱动。
步骤160,目标电机执行指令动作并按照需求功率响应工作:
具体的,被指派执行动作的目标电机,按照整机的扭矩或功率指令工作。
本发明依据电机总数划分对应数量的功率分段,每个分段使用的电机数量不同,从而根据主作业部件的功率需求,选择该需求对应的功率分段,确定该主作业部件使用的电机数量。本发明根据负载需求控制参与驱动电机的个数,尤其是在低负载、低扭矩需求时,通过降低参与电机的个数,使电机工作在高效区,降低整机能耗,提升可靠性,有效改善电机作业效率。
一种多电机控制方法实施例:
本发明的一种多电机控制方法的实施例,包括以下步骤:
1)使用至少两个电机驱动主作业部件时,确定主作业部件的功率落入的功率分段;
2)依据落入的功率分段在功率分段与目标电机数量对应关系中确定该功率分段的目标电机数量,并向对应数量的目标电机发送控制指令,以供对应数量的目标电机依据控制指令执行驱动作业;
所述功率分段依据电机总数确定,功率分段的总段数等于电机总数,每个功率分段均对应不同数量的电机;所述功率分段与目标电机数量对应关系为:对于每个功率分段,本分段的上限值小于等于本分段对应的所有电机功率之和。由此,本发明提供了一种节能、提升可靠性的多电机控制方法。该方法在本发明的一种动力系统实施例中已经详细介绍,此处不在赘述。
一种多电机动力系统实施例:
本发明一种多电机动力系统的实施例,如图1所示,包括第一主作业部件1,第二主作业部件2,驱动第一主作业部件1的第一电机1A和第二电机1B,驱动第二主作业部件2的第三电机2A、第四电机2B、和第五电机2C,电机控制器3,电能供给装置4。本系统结构在一种动力系统实施例中已经详细介绍,此处不在赘述。其中电机控制器用于执行计算机程序以依据本发明的一种非平均分配扭矩式多电机控制方法实现对主作业部件对应的所有电机的控制。
对于采用非平均分配扭矩控制方案的多电机动力系统,统计非全部电机或单电机的累计工作时间或工作时间周期,到达设定时间或累计作业计时满周期后,进行作业电机的交换控制,此过程中电机可以采用排列组合的方式进行设定周期的交替控制,可以对单电机采用排列组合方式,也可以对双电机进行排列组合方式,例如有A、B、C三个电机共同驱动,A电机单独工作到达设定周期后,依次按照B、C的顺序排布控制,另一方面A+B工作的时间到达设定周期后,可以结合单电机的排布同步进行B+C、C+A的顺序控制,不管单电机或双电机的交替排布按照何种规则,或者进行相似的规则改进和变形,均可以理解为采用本方案的范畴。
采用非平均分配扭矩控制方案的一种多电机系统优化控制方法步骤如下,如图3所示:
步骤210,设定单个电机或组合电机的工作时间切换阈值,以及电机切换执行的顺序规则:
具体的,根据工程机械整机寿命、电机寿命以及作业特点,设定相适应的单个电机或组合电机工作时间切换阈值,此阈值可以在一个或几个作业循环的时间设置,也可以是按照工作天数、月度、年度的周期设定,即不管是多长周期的设定,只要是按照时间规则的设定均属于此方案保护的范畴。电机切换执行的顺序规则设定基于可靠性等效的原则实施,可以是各电机的工作时间等效,也可以是个电机的寿命负载率等效,寿命负载率的计算可以是电机扭矩负荷率与工作时间的折算得来,也可以是其他寿命折算方式得来。比如,可以参照机械设计的等效疲劳寿命计算方法,例如100%负荷工作1个小时,与10%负荷工作10个小时的等效寿命是一致的,也可以是零部件厂家提供的寿命作为参照直接计算使用,厂家提供的寿命是10000小时,则直接按照工作时间距离最终寿命的时间计算即可。
工作时间等效是指一个循环周期内所有电机的总的工作时长相等,比如A、B、C三个电机,AB组合、AC组合、BC组合,AB组合工作L
电机切换的规则有多种方法,比如,第1种,设定一定工作时间间隔,比如1个月切换1次,或100小时切换1次,也就是说按照固定的“时间间隔”作为切换标准。第2种,按照剩余寿命的长短作为标准,比如3个电机的寿命都是10000小时,A、B、C分别已工作1000、3000、6000小时,则剩余寿命分别是9000、7000、4000,此时优先切换A为主要作业电机,至于按照是按照如何的剩余寿命比较方式,可以灵活自由设定。第3种,将前面两种方法组合起来,设置不同的触发优先级,在两个方案中灵活切换使用。
步骤220,对单电机或组合电机的工作时间进行计时:
具体的,统计单电机、组合电机的作业时间,此统计可以是基于整机的计时器数据,也可以是基于整机策略设定的计时逻辑执行。
步骤230,确定单电机或组合电机的工作时间是否到达设定的切换阈值:
具体的,判定单电机或组合电机的工作时间是否达到设定的切换阈值,此判断可以是实时判断也可以是设定周期频次的触发判断。
步骤240,按照当前目标电机工作状态发送执行动作指令:
具体的,在电机工作时间未达到设定阈值时,电机动作按照当前默认状态执行,即正常响应整机对目标电机的动作指令。
步骤250,按照切换顺序规则,切换为需要执行的目标电机,并发送执行动作指令:
目标电机按照切换顺序规则响应执行指令,此切换动作可以是实时执行,也可以是按照整机控制规则在一定周期内的延后执行。
步骤260,目标电机执行指令动作并按照需求功率响应工作:
具体的,被指派执行动作的目标电机,按照整机的扭矩或功率指令工作。
本发明根据电机负载作业时间,通过周期性的交替工作,避免个别电机过度使用,从而延长电机及传动系统的寿命,使整机系统寿命最大化,提高可靠性。
一种非平均分配扭矩式多电机控制方法实施例:
本发明的一种非平均分配扭矩式多电机控制方法的实施例,包括以下步骤:
1)使用至少两个电机驱动主作业部件时,依据电机执行顺序和切换阈值控制电机实现对所述主作业部件的驱动作业;
2)当前执行作业的电机的工作时长达到切换阈值时,则依据执行顺序切换到下一组合目标电机,由下一组合目标电机执行驱动作业;
所述执行顺序和切换阈值依据电机工作的可靠性等效的原则设置。该方法在本发明的一种多电机动力系统实施例中已经详细介绍,此处不在赘述。
由此,本发明具有以下有益效果:
(1)根据负载需求控制参与驱动电机的个数,尤其是在低负载、低扭矩需求时,通过降低参与电机的个数,使电机工作在高效区,降低整机能耗,由此,本发明提供了一种节能、提升可靠性的多电机控制方法。
(2)根据电机负载作业时间,通过周期性的交替工作,避免个别电机过度使用,从而延长电机及传动系统的寿命,使整机系统寿命最大化。
总之,本发明可有效改善电机作业效率,提升能耗,同时提升系统寿命及可靠性。
- 电机控制模块、电机控制装置、电机控制系统和电机控制方法
- 电机控制装置、电机控制方法及电机控制系统