一种笔芯式胰岛素螺杆注射泵智能控制方法
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及胰岛素注射技术领域,具体的说,涉及一种笔芯式胰岛素螺杆注射泵智能控制方法。
背景技术
胰岛素泵是由注射泵、小注射器和与之相连的输液管组成,它的基本用途是按照需要的剂量进行胰岛素注射。但是每次胰岛素的注射量都非常小,如何高精度控制胰岛素的注射量,并同时要求注射泵的体积小巧,这是一个急需要解决的难题。
经查询,现有专利文献中有一些相关专利文献的报道,主要有以下这些:
1、授权公告号CN108159530 A名称为“一种用于胰岛素泵的驱动杆与电机一体化装配结构”的发明专利,属于医疗器械装置技术领域。该专利胰岛素泵的驱动杆与电机一体化装配结构,采用一体化装配结构,两者共同固定于同一固定座上形成一个整体,保证了驱动杆和电机的同心度,使驱动杆在电机的驱动下,平稳的伸缩,最大化保证导向一直,减少阻力,延长了驱动机构的使用寿命。
2、授权公告号CN109529154 A名称为“一种新型多段沉筒式胰岛素泵推进机构”的发明专利,属于医疗器械装置技术领域。该专利采用多段沉筒式胰岛素泵的推进机构,通过设置主导轨、副导轨、主副导向杆,能够代替传统的方形导槽导向对设备加工精度要求较高的现象,能够避免加工时的精度较低时,则在推进返回过程中易出现卡死现象,造成胰岛泵故障,输注胰岛素失败。
上述两项专利只是解决了驱动机构的有效性和结构寿命问题,对于提升注射精度并兼顾注射泵本体的微型化没有涉及,而这正是未来精准医疗急需解决的难题。高精度给药并有良好用户使用体验的医疗器械,是胰岛素注射泵未来发展的主流方向。
发明内容
本发明的目的是提供一种笔芯式胰岛素螺杆注射泵智能控制方法,本发明能精确控制胰岛素药液的注射量,实现高精度给药,显著减小整体尺寸,智能控制动力马达的转动力矩和速度,减少冲击力度,减少电能的能耗,还具有防锁死功能。
为实现上述目的,本发明采用如下技术方案:
一种笔芯式胰岛素螺杆注射泵智能控制方法,该笔芯式胰岛素螺杆注射泵包括壳体、笔芯注射机构、一级螺杆伸缩机构、二级螺杆伸缩机构、动力装置、电源模块和智能控制模块,笔芯注射机构、一级螺杆伸缩机构和二级螺杆伸缩机构同轴竖向设置在壳体内左侧部,动力装置、电源模块和智能控制模块均设置在壳体内右侧部,动力装置与一级螺杆伸缩机构传动连接,动力装置驱动一级螺杆伸缩机构伸缩,二级螺杆伸缩机构安装在一级螺杆伸缩机构内部并与一级螺杆伸缩机构传动连接,一级螺杆伸缩机构驱动二级螺杆伸缩机构伸缩,笔芯注射机构设置在二级螺杆伸缩机构的上部并与二级螺杆伸缩机构的伸缩端连接,壳体上设有按键操作模块,一级螺杆伸缩机构上设置有传感器组件,电源模块分别提供电源给动力装置和智能控制模块,智能控制模块分别与动力装置、按键操作模块和传感器组件信号连接;
所述的智能控制方法具体包括以下步骤:
(一)、启动该笔芯式胰岛素螺杆注射泵,操作按键操作模块,智能控制模块控制动力装置工作,动力装置驱动一级螺杆伸缩机构和二级螺杆伸缩机构收缩,将预制式针剂的胰岛素药液装填入笔芯注射机构中;
(二)、操作按键操作模块,智能控制模块控制动力装置工作,动力装置驱动一级螺杆伸缩机构先伸长,一级螺杆伸缩机构伸长至极限时,传感器组件将信号传输给智能控制模块,智能控制模块控制动力装置转速降低,以减少一级螺杆伸缩机构的冲击力度,接着二级螺杆伸缩机构开始伸长,直至二级螺杆伸缩机构伸长至最大极限位置时,智能控制模块控制动力装置停止;在一级螺杆伸缩机构和二级螺杆伸缩机构伸长过程中,笔芯注射机构进行胰岛素药液注射;
(三)、胰岛素药液注射完成后,重复步骤(一),重新装填胰岛素药液,准备下一次注射。
壳体的底部敞口并固定连接有底盖,壳体内部左侧沿竖向一体成型设有类似笔筒结构的注射筒,注射筒的上端向上穿出壳体的顶部,注射筒的下端向下延伸至壳体内左下部,壳体内右下部设有电气内腔,电源模块和智能控制模块设置在电气内腔中,动力装置设置在壳体内右上部。
笔芯注射机构包括笔芯和芯活塞,笔芯同轴固定嵌设在注射筒中,笔芯的外圆与注射筒的内圆紧密贴合接触,笔芯的下端敞口,笔芯的下端位于注射筒内且靠近注射筒的下端,笔芯的上端一体成型有上大下小的T型中空圆柱头,T型中空圆柱头的最大圆周直径小于笔芯的直径,T型中空圆柱头的下端与笔芯的上端通过上细下粗的圆台筒连接,注射筒的上端同轴螺纹连接有针头帽盖,T型中空圆柱头嵌设在针头帽盖中,针头帽盖的顶部中心同轴一体成型有圆柱凸起,圆柱凸起的中心沿竖向开设有第一中心孔,第一中心孔内同轴固定嵌设有注射软管,注射软管的上端伸出圆柱凸起的上端并连接有注射针头,针头帽盖的中心开设有与第一中心孔同轴的第二中心孔,第二中心孔的内径小于第一中心孔的内径,第二中心孔的上端与第一中心孔的下端连接,第二中心孔内同轴固定嵌设有针管,针管同轴贯穿T型中空圆柱头并伸入到T型中空圆柱头内,针管的下端与笔芯内部连通,芯活塞同轴密封滑动设置在笔芯中。
一级螺杆伸缩机构包括一级固定杆、一级管式螺杆和驱动筒,固定座的上表面外边沿一体成型有圆环凸边,固定座的中心开设有第三中心孔,一级固定杆同轴设置在注射筒的下方,一级固定杆的上端位于注射筒的下端中心处,一级固定杆的下端固定连接在第三中心孔中,一级管式螺杆同轴套在一级固定杆的外部,驱动筒同轴套在一级管式螺杆的外部且设置在注射筒和固定座之间,驱动筒的上端转动连接在注射筒的下端,驱动筒的下端转动连接在圆环凸边上,驱动筒的内径小于笔芯的内径,驱动筒的上端部内圆设有第一内螺纹,一级管式螺杆的外圆沿轴向设有与第一内螺纹螺纹配合的第一外螺纹,一级管式螺杆的上端部内圆设有第二内螺纹,一级管式螺杆的下端和驱动筒的下端齐平且高于固定座的上表面,一级管式螺杆的上端高于驱动筒的上端,一级管式螺杆的上端部外圆固定套装有位于驱动筒上端上方的限位环,驱动筒的上端面设有一块向上凸的第一楔形扣,限位环的下端面设有一块向下凸的第二楔形扣,当一级管式螺杆向下收缩到驱动筒中并下移至下极限位置时,第二楔形扣与第一楔形扣啮合,限位环的上端面设有一块向上凸的第三楔形扣,驱动筒的上端部外圆周固定套装有驱动齿轮;
二级螺杆伸缩机构包括二级固定管套和二级管式螺杆,二级固定管套同轴滑动套装在一级固定杆上,二级管式螺杆同轴滑动套装在二级固定管套上且位于一级管式螺杆中,二级管式螺杆的外圆沿轴向设有与第二内螺纹螺纹配合的第二外螺纹,二级固定管套的上端与一级固定杆的上端齐平,二级固定管套的下端与一级管式螺杆的下端齐平,二级管式螺杆的上端高于一级管式螺杆的上端并固定连接有位于限位环上方的限位螺杆塞,限位螺杆塞的直径小于笔芯的内径,限位螺杆塞的顶部伸入到笔芯中并与芯活塞的底部固定连接,限位螺杆塞的底部外边缘设有一块向下凸的第四楔形扣,当二级管式螺杆向下收缩到一级管式螺杆中并下移至下极限位置时,第四楔形扣与第三楔形扣啮合,二级管式螺杆的下端高于二级固定管套的下端,一级固定杆的外侧壁沿轴向开设有下侧和外侧敞口的第一限位卡槽,二级固定管套的下端部内壁一体成型有对应滑动卡设在第一限位卡槽中的第一限位卡块,二级固定管套的外侧壁沿轴向开设有下侧和外侧敞口的第二限位卡槽,二级管式螺杆的下端部内壁一体成型有对应滑动卡设在第二限位卡槽中的第二限位卡块;
第一内螺纹、第一外螺纹、第二内螺纹和第二外螺纹均为螺距相同的梯形螺纹。
动力装置包括动力马达,动力马达固定安装在壳体内右上部,动力马达的输出轴竖向设置在动力马达的下侧,动力马达的输出轴下端同轴固定安装有马达齿轮,马达齿轮位于驱动齿轮右侧并与驱动齿轮啮合传动连接,电源模块与动力马达电性连接,智能控制模块与动力马达信号连接;
传感器组件包括位置传感器,位置传感器设置在第一内螺纹的下端尾部梯形螺纹的下侧面,驱动筒的筒体上对应位置传感器沿轴向开设有线束通道,线束通道的下端同轴设有直径大于线束通道的安装孔,安装孔的下端口开设在驱动筒的下端面上,安装孔内上部固定设有弹性导电体,线束通道内穿设有一根第一信号导线,第一信号导线的上端与位置传感器连接,第一信号导线的下端与弹性导电体连接,弹性导电体的下端固定连接有位于安装孔内下部的导电滚珠,导电滚珠的下侧部向下凸出安装孔的下端口,固定座的上表面固定设有导电片,导电片与导电滚珠上下对应滚压接触,导电片通过一根穿过固定座下表面并引入到电气内腔中的第二信号导线与智能控制模块信号连接;
笔芯由透明材料制成,笔芯的外壁中间位置设置有嵌设在注射筒内壁上且自带灯光的摄像头,电源模块与摄像头电性连接,智能控制模块与摄像头信号连接;
智能控制模块为具有嵌入式处理器的微型计算机,智能控制模块还内置有二级螺杆伸缩机构的软限位,其软限位参数由一级管式螺杆和二级管式螺杆的几何参数:螺距、总长度和工作长度确定,因而,在二级管式螺杆下端部内壁上的第二限位卡块向上滑动到第二限位卡槽的上端处并被拉住及二级管式螺杆向下收缩到一级管式螺杆中并下移至下极限位置时,智能控制模块立刻控制动力马达停止转动。
步骤(一)具体为:打开电源模块,智能控制模块初始化,将注射针头插入胰岛素针剂瓶中,操作按键操作模块,智能控制模块控制动力马达反转,动力马达的输出轴通过马达齿轮和驱动齿轮带动驱动筒反转,驱动筒通过第一内螺纹和第一外螺纹驱使一级管式螺杆向下收缩到驱动筒中,一级管式螺杆便带动二级固定管套和二级管式螺杆相对一级固定杆向下移动,二级管式螺杆带动限位螺杆塞和芯活塞向下移动,从而芯活塞便可将胰岛素针剂瓶中的胰岛素药液通过注射针头、注射软管和针管抽入到笔芯中,当一级管式螺杆向下收缩到驱动筒中并下移至下极限位置时,第二楔形扣与第一楔形扣啮合,一级管式螺杆无法继续向下移动,驱动筒便通过第一楔形扣和第二楔形扣带动一级管式螺杆一起反向转动,一级管式螺杆与二级管式螺杆相对转动,一级管式螺杆通过第二内螺纹和第二外螺纹驱使二级管式螺杆向下收缩到一级管式螺杆中,二级管式螺杆继续带动限位螺杆塞和芯活塞向下移动,芯活塞继续将胰岛素针剂瓶中的胰岛素药液通过注射针头、注射软管和针管抽入到笔芯中,当二级管式螺杆向下收缩到一级管式螺杆中并下移至下极限位置时,第四楔形扣与第三楔形扣啮合,二级管式螺杆无法继续向下移动,智能控制模块立刻控制动力马达停止转动,笔芯中充满胰岛素药液,完成胰岛素药液装填作业,更换新的注射针头,准备注射。
步骤(二)具体为:操作按键操作模块,智能控制模块控制动力马达正转,动力马达的输出轴带动马达齿轮转动,马达齿轮啮合传动驱动齿轮,驱动齿轮便带动驱动筒正转,驱动筒与一级管式螺杆相对转动,驱动筒通过第一内螺纹和第一外螺纹驱使一级管式螺杆向上伸出驱动筒,一级管式螺杆便带动二级固定管套和二级管式螺杆相对一级固定杆向上移动,二级固定管套下端部内壁上的第一限位卡块沿着一级固定杆外侧壁上的第一限位卡槽向上滑动,二级管式螺杆推动限位螺杆塞和芯活塞向上移动,从而芯活塞将笔芯中的胰岛素药液推出并通过针管、注射软管和注射针头进行注射,其中,由于第一内螺纹、第一外螺纹、第二内螺纹和第二外螺纹均为螺距相同的梯形螺纹,那么驱动筒旋转一圈即可实现一级管式螺杆向上移动一个螺距的长度,并且导电滚珠与导电片滚压接触一次,则位置传感器将信号传给智能控制模块一次,智能控制模块通过采集位置传感器的信号得到驱动筒的旋转圈数信息,智能控制模块根据驱动筒的旋转圈数获得一级管式螺杆向上移动的距离,同时智能控制模块采用金字塔式YOLO7算法对摄像头采集的图像进行处理,识别芯活塞的位置,进而测量笔芯内胰岛素药液的已注射量,智能控制模块控制动力马达改变转动力矩和速度,减轻一级管式螺杆和驱动筒之间的冲击力度,直至一级管式螺杆向上移动到上极限位置时,即一级管式螺杆与驱动筒无法继续相对旋转运动,同时第一限位卡块向上滑动到第一限位卡槽的上端处并被拉住时,一级管式螺杆与驱动筒传动连接为一体,一级管式螺杆的运动形式从竖直方向上下移动变为随驱动筒一起转动,则一级管式螺杆便与二级管式螺杆相对转动,一级管式螺杆通过第二内螺纹和第二外螺纹驱使二级管式螺杆向上伸出一级管式螺杆,二级管式螺杆相对二级固定管套向上移动,二级管式螺杆继续推动限位螺杆塞和芯活塞向上移动,芯活塞继续将笔芯中的胰岛素药液推出并通过针管、注射软管和注射针头进行注射,当二级管式螺杆下端部内壁上的第二限位卡块向上滑动到第二限位卡槽的上端处并被拉住时,二级管式螺杆向上移动到其上极限位置,一级管式螺杆与二级管式螺杆无法继续相对转动,智能控制模块控制动力马达停止转动,整个胰岛素药液的注射过程便完成。
智能控制模块控制动力马达改变转动力矩和速度动作流程如下:
A)、当智能控制模块采集到位置传感器信号次数达到第一设定次数时,驱动筒的旋转圈数达到第一设定圈数,一级管式螺杆向上移动开始接近其上极限位置状态,同时智能控制模块通过摄像头测量到笔芯内胰岛素药液的已注射量大于三分之一并开始接近二分之一,智能控制模块控制动力马达的驱动电流提升到标准状态(50mA)的125%,提升动力马达的转动力矩,并通过PWM调速,将动力马达的速度降低到标准状态(200rpm/Sec)的80%;
B)、驱动筒继续正向转动,智能控制模块采集到位置传感器信号次数达到第二设定次数时,驱动筒的旋转圈数达到第二设定圈数,一级管式螺杆向上移动进一步接近其上极限位置状态,同时智能控制模块通过摄像头识别到芯活塞进一步上移,测量到笔芯内胰岛素药液的已注射量进一步接近二分之一,智能控制模块控制动力马达的驱动电流提升到标准状态(50mA)的150%,提升动力马达的转动力矩,并通过PWM调速,将动力马达的速度降低到标准状态(200rpm/Sec)的60%;
C)、驱动筒继续正向转动,智能控制模块采集到位置传感器信号次数达到第三设定次数时,驱动筒的旋转圈数达到第三设定圈数,一级管式螺杆向上移动快要接近其上极限位置状态,同时智能控制模块通过摄像头识别到芯活塞进一步上移,测量到笔芯内胰岛素药液的已注射量快要接近二分之一,智能控制模块控制动力马达的驱动电流提升到标准状态(50mA)的200%,提升动力马达的转动力矩,并通过PWM调速,将动力马达的速度降低到标准状态(200rpm/Sec)的20%,减少一级管式螺杆和驱动筒的冲击力度;
D)、驱动筒继续正向转动,智能控制模块采集到位置传感器信号次数达到第四设定次数时,驱动筒的旋转圈数达到第四设定圈数,一级管式螺杆向上移动到其上极限位置状态,同时智能控制模块通过摄像头识别到芯活塞进一步上移,测量到笔芯内胰岛素药液的已注射量进一步达到二分之一,智能控制模块控制动力马达的驱动电流提升到标准状态(50mA)的300%,提升动力马达的转动力矩,并通过PWM调速,将动力马达的速度降低到标准状态(200rpm/Sec)的5%,进一步减少一级管式螺杆和驱动筒的冲击力度。
金字塔式YOLO7算法输入图像为摄像头采集的图像,摄像头实时监控画面图像的分辨率为w×h像素,w取值为1280像素,h取值为720像素,金字塔式YOLO7算法对原始输入图像的w×h像素关键帧进行矩形窗口裁剪,矩形窗口裁剪的起点和终点分别标记为A(x
(1)、对历史检测的数据进行分析,获取最近7天的自适应权重的金字塔式YOLO7算法标记出的目标对象热点最大外接矩形区域的坐标,分别标记为S
(2)、将x
上式1)中,[n/2]为n/2向下取整;同理,将y
判断计算x
(3)、将x
同理将y
判断计算x
(4)、如果历史数据的时间累计天数小于7天,起点A的坐标设置为(1,1),终点B的坐标设置为(1280,720),也即是x
金字塔式YOLO7算法进行图像处理的流程如下:
(Ⅰ)、该笔芯式胰岛素螺杆注射泵该笔芯式胰岛素螺杆注射泵进行胰岛素药液注射工作时,智能控制模块每间隔10ms获取一次摄像头采集到的图像,金字塔式YOLO7算法判断图像阈值是否大于5ml/hour,如果大于5ml/hour,转入下一步骤(Ⅱ),否则继续执行当前步骤(Ⅰ);
(Ⅱ)、如果当前注射的量不足笔芯容量的二分之一,获取摄像头当前时刻的关键帧通过矩形窗口裁剪后的图像,记作图像A;以当前时刻为起点,获取前500ms和前2秒的关键帧通过矩形窗口裁剪后的图像,分别记作图像B和C,转入下一步骤(Ⅲ);
(Ⅲ)、首先,金字塔式YOLO7算法对图像A进行YOLO7的目标对象检测,计算当前图像中存在注射量为小于等于0、大于0小于1/2和1的最大概率,标记为P{a, b, c},YOLO7算法提前离线针对上述三种目标进行过训练;进一步,对图像A按长度和宽度方向进行2等分,分割成A
其中,w1…w9为权重,其值随YOLO7的检测结果动态变权,其计算如下式6)~8):
(Ⅳ)、接着,参照对图像A进行自适应权重的金字塔式YOLO7方法,对图像B和C进行处理,获取图像B和C最终的目标检测概率,记作P
(Ⅴ)、取出所述三幅图像A、B和C所对应的最终的目标检测概率P
(Ⅵ)、检测完毕后,重新进入下一轮的检测,转入步骤(Ⅰ)进行处理。
本发明相对现有技术具有突出的实质性特点和显著的进步,具体地说,本发明的驱动筒的上端部内圆设有第一内螺纹,一级管式螺杆的外圆沿轴向设有与第一内螺纹螺纹配合的第一外螺纹,一级管式螺杆的上端部内圆设有第二内螺纹,二级管式螺杆的外圆沿轴向设有与第二内螺纹螺纹配合的第二外螺纹,第一内螺纹、第一外螺纹、第二内螺纹和第二外螺纹均为螺距相同的梯形螺纹,那么驱动筒旋转一圈即可实现一级管式螺杆或二级管式螺杆伸出或收缩一个螺距的长度,能精确控制胰岛素药液的注射量,实现高精度给药,显著减小整体尺寸,那么在整个胰岛素药液注射过程中,智能控制模块通过采集位置传感器的信号即可计算驱动筒的旋转圈数,智能控制模块根据驱动筒的旋转圈数获得一级管式螺杆向上移动的距离,同时智能控制模块采用金字塔式YOLO7算法对摄像头采集的图像进行处理,识别芯活塞的位置,进而测量笔芯内胰岛素药液的已注射量,智能控制模块控制动力马达改变转动力矩和速度,减轻一级管式螺杆和驱动筒之间的冲击力度,减少电能的能耗;智能控制模块还内置有二级螺杆伸缩机构的软限位,其软限位参数由一级管式螺杆和二级管式螺杆的几何参数:螺距、总长度和工作长度确定,并在二级管式螺杆下端部内壁上的第二限位卡块向上滑动到第二限位卡槽的上端处并被拉住及二级管式螺杆向下收缩到一级管式螺杆中并下移至下极限位置时,智能控制模块立刻控制动力马达停止转动,避免二级管式螺杆被拉紧或二级管式螺杆进入一级管式螺杆内过紧而导致锁死,同时也避免动力马达出现过载而导致其输出轴扭矩过大受损情况的发生,起到保护动力马达、一级管式螺杆和二级管式螺杆的作用。
本发明装填胰岛素药液时,动力马达通过马达齿轮和驱动齿轮带动驱动筒反转,使一级管式螺杆向下收缩到驱动筒中,由于一级管式螺杆的上端部外圆固定套装有位于驱动筒上端上方的限位环,驱动筒的上端面设有一块向上凸的第一楔形扣,限位环的下端面设有一块向下凸的第二楔形扣,限位环的上端面设有一块向上凸的第三楔形扣,限位螺杆塞的底部外边缘设有一块向下凸的第四楔形扣,当一级管式螺杆向下收缩到驱动筒中并下移至下极限位置时,第二楔形扣与第一楔形扣啮合,此时,一级管式螺杆便随驱动筒一起反向转动,避免一级管式螺杆进入驱动筒内过深或过紧而导致锁死,一级管式螺杆与二级管式螺杆相对转动,一级管式螺杆通过第二内螺纹和第二外螺纹驱使二级管式螺杆向下收缩到一级管式螺杆中,同理当二级管式螺杆向下收缩到一级管式螺杆中并下移至下极限位置时,第四楔形扣与第三楔形扣啮合,此时,二级管式螺杆无法继续向下收缩到一级管式螺杆中,由于第二楔形扣与第一楔形扣啮合、第四楔形扣与第三楔形扣啮合,进而可以在结构上起到防锁死作用。
综上所述,本发明能精确控制胰岛素药液的注射量,实现高精度给药,显著减小整体尺寸,智能控制动力马达的转动力矩和速度,减少冲击力度,减少电能的能耗,还具有防锁死功能。
附图说明
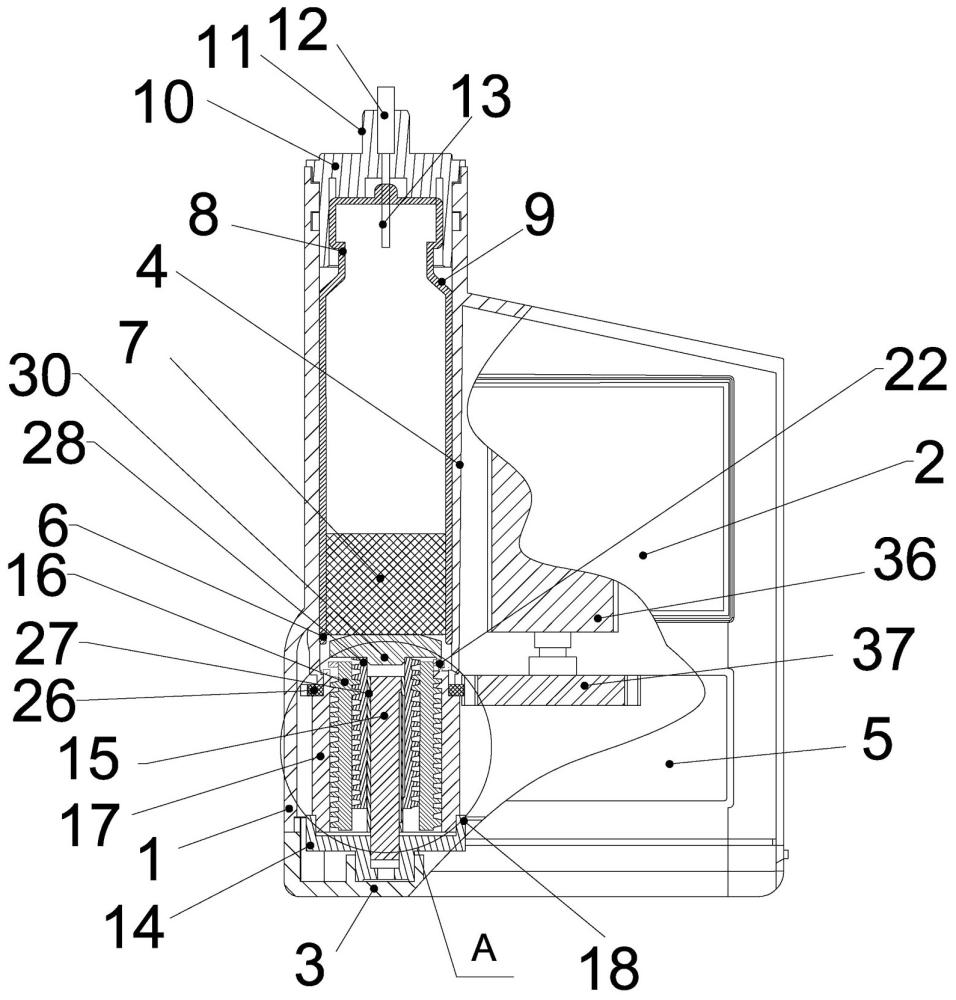
图1是本发明在装填满胰岛素药液准备注射的初始状态示意图。
图2是本发明注射胰岛素药液过程中的一个中间状态示意图(一级管式螺杆向上移动到上极限位置)。
图3是本发明在胰岛素药液注射完成后的示意图(二级管式螺杆向上移动到上极限位置)。
图4是本发明重新装填胰岛素药液过程中的一个中间状态示意图(一级管式螺杆向下移动到下极限位置)。
图5是本发明重新装填胰岛素药液完成后的示意图(二级管式螺杆向下移动到下极限位置)。
图6是本发明重新装填胰岛素药液完成后的一级管式螺杆和二级管式螺杆均回到初始状态时限位环的工作状态示意图
图7是本发明的位置传感器、弹性导电体、第一信号导线和导电滚珠在驱动筒上的立面示意图。
图8是本发明的金字塔式YOLO7算法对原始输入图像的w×h像素关键帧进行矩形窗口裁剪的示意图。
图9是本发明的金字塔式YOLO7算法对图像A进行YOLO7的目标对象检测的示意图图。
图10是图1中的A处局部放大图。
图11是图7中的B处局部放大图。
具体实施方式
以下结合附图进一步说明本发明的实施例。
如图1-11所示,一种笔芯式胰岛素螺杆注射泵智能控制方法,该笔芯式胰岛素螺杆注射泵包括壳体1、笔芯注射机构、一级螺杆伸缩机构、二级螺杆伸缩机构、动力装置、电源模块和智能控制模块,笔芯注射机构、一级螺杆伸缩机构和二级螺杆伸缩机构同轴竖向设置在壳体内左侧部,动力装置、电源模块和智能控制模块均设置在壳体1内右侧部,动力装置与一级螺杆伸缩机构传动连接,动力装置驱动一级螺杆伸缩机构伸缩,二级螺杆伸缩机构安装在一级螺杆伸缩机构内部并与一级螺杆伸缩机构传动连接,一级螺杆伸缩机构驱动二级螺杆伸缩机构伸缩,笔芯注射机构设置在二级螺杆伸缩机构的上部并与二级螺杆伸缩机构的伸缩端连接,壳体1上设有按键操作模块2,一级螺杆伸缩机构上设置有传感器组件,电源模块分别提供电源给动力装置和智能控制模块,智能控制模块分别与动力装置、按键操作模块2和传感器组件信号连接;
所述的智能控制方法具体包括以下步骤:
(一)、启动该笔芯式胰岛素螺杆注射泵,操作按键操作模块2,智能控制模块控制动力装置工作,动力装置驱动一级螺杆伸缩机构和二级螺杆伸缩机构收缩,将预制式针剂的胰岛素药液装填入笔芯注射机构中;
(二)、操作按键操作模块2,智能控制模块控制动力装置工作,动力装置驱动一级螺杆伸缩机构先伸长,一级螺杆伸缩机构伸长至极限时,传感器组件将信号传输给智能控制模块,智能控制模块控制动力装置转速降低,以减少一级螺杆伸缩机构的冲击力度,接着二级螺杆伸缩机构开始伸长,直至二级螺杆伸缩机构伸长至最大极限位置时,智能控制模块控制动力装置停止;在一级螺杆伸缩机构和二级螺杆伸缩机构伸长过程中,笔芯注射机构进行胰岛素药液注射;
(三)、胰岛素药液注射完成后,重新装填胰岛素药液,准备下一次注射。
壳体1的底部敞口并固定连接有底盖3,壳体1内部左侧沿竖向一体成型设有类似笔筒结构的注射筒4,注射筒4的上端向上穿出壳体1的顶部,注射筒4的下端向下延伸至壳体1内左下部,壳体1内右下部设有电气内腔5,电源模块和智能控制模块设置在电气内腔5中,动力装置设置在壳体1内右上部。
笔芯注射机构包括笔芯6和芯活塞7,笔芯6同轴固定嵌设在注射筒4中,笔芯6的外圆与注射筒4的内圆紧密贴合接触,笔芯6的下端敞口,笔芯6的下端位于注射筒4内且靠近注射筒4的下端,笔芯6的上端一体成型有上大下小的T型中空圆柱头8,T型中空圆柱头8的最大圆周直径小于笔芯6的直径,T型中空圆柱头8的下端与笔芯6的上端通过上细下粗的圆台筒9连接,注射筒4的上端同轴螺纹连接有针头帽盖10,T型中空圆柱头8嵌设在针头帽盖10中,针头帽盖10的顶部中心同轴一体成型有圆柱凸起11,圆柱凸起11的中心沿竖向开设有第一中心孔,第一中心孔内同轴固定嵌设有注射软管12,注射软管12的上端伸出圆柱凸起11的上端并连接有注射针头,针头帽盖10的中心开设有与第一中心孔同轴的第二中心孔,第二中心孔的内径小于第一中心孔的内径,第二中心孔的上端与第一中心孔的下端连接,第二中心孔内同轴固定嵌设有针管13,针管13同轴贯穿T型中空圆柱头8并伸入到T型中空圆柱头8内,针管13的下端与笔芯6内部连通,芯活塞7同轴密封滑动设置在笔芯6中。
一级螺杆伸缩机构包括一级固定杆15、一级管式螺杆16和驱动筒17,固定座14的上表面外边沿一体成型有圆环凸边18,固定座14的中心开设有第三中心孔,一级固定杆15同轴设置在注射筒4的下方,一级固定杆15的上端位于注射筒4的下端中心处,一级固定杆15的下端固定连接在第三中心孔中,一级管式螺杆16同轴套在一级固定杆15的外部,驱动筒17同轴套在一级管式螺杆16的外部且设置在注射筒4和固定座14之间,驱动筒17的上端转动连接在注射筒4的下端,驱动筒17的下端转动连接在圆环凸边18上,驱动筒17的内径小于笔芯6的内径,驱动筒17的上端部内圆设有第一内螺纹19,一级管式螺杆16的外圆沿轴向设有与第一内螺纹19螺纹配合的第一外螺纹20,一级管式螺杆16的上端部内圆设有第二内螺纹21,一级管式螺杆16的下端和驱动筒17的下端齐平且高于固定座14的上表面,一级管式螺杆16的上端高于驱动筒17的上端,一级管式螺杆16的上端部外圆固定套装有位于驱动筒17上端上方的限位环22,驱动筒17的上端面设有一块向上凸的第一楔形扣23,限位环22的下端面设有一块向下凸的第二楔形扣24,当一级管式螺杆16向下收缩到驱动筒17中并下移至下极限位置时,第二楔形扣24与第一楔形扣23啮合,限位环22的上端面设有一块向上凸的第三楔形扣25,驱动筒17的上端部外圆周固定套装有驱动齿轮26;
二级螺杆伸缩机构包括二级固定管套27和二级管式螺杆28,二级固定管套27同轴滑动套装在一级固定杆15上,二级管式螺杆28同轴滑动套装在二级固定管套27上且位于一级管式螺杆16中,二级管式螺杆28的外圆沿轴向设有与第二内螺纹21螺纹配合的第二外螺纹29,二级固定管套27的上端与一级固定杆15的上端齐平,二级固定管套27的下端与一级管式螺杆16的下端齐平,二级管式螺杆28的上端高于一级管式螺杆16的上端并固定连接有位于限位环22上方的限位螺杆塞30,限位螺杆塞30的直径小于笔芯6的内径,限位螺杆塞30的顶部伸入到笔芯6中并与芯活塞7的底部固定连接,限位螺杆塞30的底部外边缘设有一块向下凸的第四楔形扣31,当二级管式螺杆28向下收缩到一级管式螺杆16中并下移至下极限位置时,第四楔形扣31与第三楔形扣25啮合,二级管式螺杆28的下端高于二级固定管套27的下端,一级固定杆15的外侧壁沿轴向开设有下侧和外侧敞口的第一限位卡槽32,二级固定管套27的下端部内壁一体成型有对应滑动卡设在第一限位卡槽32中的第一限位卡块33,二级固定管套27的外侧壁沿轴向开设有下侧和外侧敞口的第二限位卡槽34,二级管式螺杆28的下端部内壁一体成型有对应滑动卡设在第二限位卡槽34中的第二限位卡块35;
第一内螺纹19、第一外螺纹20、第二内螺纹21和第二外螺纹29均为螺距相同的梯形螺纹。
动力装置包括动力马达36,动力马达36固定安装在壳体1内右上部,动力马达36的输出轴竖向设置在动力马达36的下侧,动力马达36的输出轴下端同轴固定安装有马达齿轮37,马达齿轮37位于驱动齿轮26右侧并与驱动齿轮26啮合传动连接,电源模块与动力马达36电性连接,智能控制模块与动力马达36信号连接。
传感器组件包括位置传感器38,位置传感器38设置在第一内螺纹19的下端尾部梯形螺纹的下侧面,驱动筒17的筒体上对应位置传感器38沿轴向开设有线束通道39,线束通道39的下端同轴设有直径大于线束通道39的安装孔40,安装孔40的下端口开设在驱动筒17的下端面上,安装孔40内上部固定设有弹性导电体41,线束通道39内穿设有一根第一信号导线42,第一信号导线42的上端与位置传感器38连接,第一信号导线42的下端与弹性导电体41连接,弹性导电体41的下端固定连接有位于安装孔40内下部的导电滚珠43,导电滚珠43的下侧部向下凸出安装孔40的下端口,固定座14的上表面固定设有导电片44,导电片44与导电滚珠43上下对应滚压接触,导电片44通过一根穿过固定座14下表面并引入到电气内腔5中的第二信号导线与智能控制模块信号连接。
笔芯6由透明材料制成,笔芯6的外壁中间位置设置有嵌设在注射筒4内壁上且自带灯光的摄像头,电源模块与摄像头电性连接,智能控制模块与摄像头信号连接。
智能控制模块为具有嵌入式处理器的微型计算机,智能控制模块还内置有二级螺杆伸缩机构的软限位,其软限位参数由一级管式螺杆16和二级管式螺杆28的几何参数:螺距、总长度和工作长度确定,因而,在二级管式螺杆28下端部内壁上的第二限位卡块向上滑动到第二限位卡槽的上端处并被拉住及二级管式螺杆28向下收缩到一级管式螺杆16中并下移至下极限位置时,智能控制模块立刻控制动力马达36停止转动。
步骤(一)具体为:打开电源模块,智能控制模块初始化,将注射针头插入胰岛素针剂瓶中,操作按键操作模2,智能控制模块控制动力马达36反转,动力马达36的输出轴通过马达齿轮37和驱动齿轮26带动驱动筒17反转,驱动筒17通过第一内螺纹19和第一外螺纹20驱使一级管式螺杆16向下收缩到驱动筒17中,一级管式螺杆16便带动二级固定管套27和二级管式螺杆28相对一级固定杆15向下移动,二级管式螺杆28带动限位螺杆塞30和芯活塞7向下移动,从而芯活塞7便可将胰岛素针剂瓶中的胰岛素药液通过注射针头、注射软管12和针管13抽入到笔芯6中,当一级管式螺杆16向下收缩到驱动筒17中并下移至下极限位置时,第二楔形扣24与第一楔形扣23啮合,一级管式螺杆16无法继续向下移动,驱动筒17便通过第一楔形扣23和第二楔形扣24带动一级管式螺杆16一起反向转动,一级管式螺杆16与二级管式螺杆28相对转动,一级管式螺杆16通过第二内螺纹21和第二外螺纹29驱使二级管式螺杆28向下收缩到一级管式螺杆16中,二级管式螺杆28继续带动限位螺杆塞30和芯活塞7向下移动,芯活塞7继续将胰岛素针剂瓶中的胰岛素药液通过注射针头、注射软管12和针管13抽入到笔芯6中,当二级管式螺杆28向下收缩到一级管式螺杆16中并下移至下极限位置时,第四楔形扣31与第三楔形扣25啮合,二级管式螺杆28无法继续向下移动,智能控制模块立刻控制动力马达36停止转动,笔芯6中充满胰岛素药液,完成胰岛素药液装填作业,更换新的注射针头,准备注射。
步骤(二)具体为:操作按键操作模块2,智能控制模块控制动力马达36正转,动力马达36的输出轴带动马达齿轮37转动,马达齿轮37啮合传动驱动齿轮26,驱动齿轮26便带动驱动筒17正转,驱动筒17与一级管式螺杆16相对转动,驱动筒17通过第一内螺纹19和第一外螺纹20驱使一级管式螺杆16向上伸出驱动筒17,一级管式螺杆16便带动二级固定管套27和二级管式螺杆28相对一级固定杆15向上移动,二级固定管套27下端部内壁上的第一限位卡块33沿着一级固定杆15外侧壁上的第一限位卡槽32向上滑动,二级管式螺杆28推动限位螺杆塞30和芯活塞7向上移动,从而芯活塞7将笔芯6中的胰岛素药液推出并通过针管13、注射软管12和注射针头进行注射,其中,由于第一内螺纹19、第一外螺纹20、第二内螺纹21和第二外螺纹29均为螺距相同的梯形螺纹,那么驱动筒17旋转一圈即可实现一级管式螺杆16向上移动一个螺距的长度,并且导电滚珠43与导电片44滚压接触一次,则位置传感器38将信号传给智能控制模块一次,智能控制模块通过采集位置传感器38的信号得到驱动筒17的旋转圈数信息,智能控制模块根据驱动筒17的旋转圈数获得一级管式螺杆16向上移动的距离,同时智能控制模块采用金字塔式YOLO7算法对摄像头采集的图像进行处理,识别芯活塞7的位置,进而测量笔芯6内胰岛素药液的已注射量,智能控制模块控制动力马达36改变转动力矩和速度,减轻一级管式螺杆16和驱动筒17之间的冲击力度,直至一级管式螺杆16向上移动到上极限位置时,即一级管式螺杆16与驱动筒17无法继续相对旋转运动,同时第一限位卡块33向上滑动到第一限位卡槽32的上端处并被拉住时,一级管式螺杆16与驱动筒17传动连接为一体,一级管式螺杆16的运动形式从竖直方向上下移动变为随驱动筒17一起转动,则一级管式螺杆16便与二级管式螺杆28相对转动,一级管式螺杆16通过第二内螺纹21和第二外螺纹29驱使二级管式螺杆28向上伸出一级管式螺杆16,二级管式螺杆28相对二级固定管套27向上移动,二级管式螺杆28继续推动限位螺杆塞30和芯活塞7向上移动,芯活塞7继续将笔芯6中的胰岛素药液推出并通过针管13、注射软管12和注射针头进行注射,当二级管式螺杆28下端部内壁上的第二限位卡块35向上滑动到第二限位卡槽34的上端处并被拉住时,二级管式螺杆28向上移动到其上极限位置,一级管式螺杆16与二级管式螺杆28无法继续相对转动,智能控制模块控制动力马达36停止转动,整个胰岛素药液的注射过程便完成。
智能控制模块控制动力马达36改变转动力矩和速度动作流程如下:
A)、当智能控制模块采集到位置传感器38信号次数达到第一设定次数时,驱动筒17的旋转圈数达到第一设定圈数,一级管式螺杆16向上移动开始接近其上极限位置状态,同时智能控制模块通过摄像头测量到笔芯6内胰岛素药液的已注射量大于三分之一并开始接近二分之一,智能控制模块控制动力马达36的驱动电流提升到标准状态(50mA)的125%,提升动力马达36的转动力矩,并通过PWM调速,将动力马达36的速度降低到标准状态(200rpm/Sec)的80%;
B)、驱动筒17继续正向转动,智能控制模块采集到位置传感器38信号次数达到第二设定次数时,驱动筒17的旋转圈数达到第二设定圈数,一级管式螺杆16向上移动进一步接近其上极限位置状态,同时智能控制模块通过摄像头识别到芯活塞7进一步上移,测量到笔芯6内胰岛素药液的已注射量进一步接近二分之一,智能控制模块控制动力马达36的驱动电流提升到标准状态(50mA)的150%,提升动力马达36的转动力矩,并通过PWM调速,将动力马达36的速度降低到标准状态(200rpm/Sec)的60%;
C)、驱动筒17继续正向转动,智能控制模块采集到位置传感器38信号次数达到第三设定次数时,驱动筒17的旋转圈数达到第三设定圈数,一级管式螺杆16向上移动快要接近其上极限位置状态,同时智能控制模块通过摄像头识别到芯活塞7进一步上移,测量到笔芯6内胰岛素药液的已注射量快要接近二分之一,智能控制模块控制动力马达36的驱动电流提升到标准状态(50mA)的200%,提升动力马达36的转动力矩,并通过PWM调速,将动力马达36的速度降低到标准状态(200rpm/Sec)的20%,减少一级管式螺杆16和驱动筒17的冲击力度;
D)、驱动筒17继续正向转动,智能控制模块采集到位置传感器信号次数达到第四设定次数时,驱动筒17的旋转圈数达到第四设定圈数,一级管式螺杆16向上移动到其上极限位置状态,同时智能控制模块通过摄像头识别到芯活塞7进一步上移,测量到笔芯6内胰岛素药液的已注射量进一步达到二分之一,智能控制模块控制动力马达36的驱动电流提升到标准状态(50mA)的300%,提升动力马达36的转动力矩,并通过PWM调速,将动力马达36的速度降低到标准状态(200rpm/Sec)的5%,进一步减少一级管式螺杆16和驱动筒17的冲击力度。
金字塔式YOLO7算法输入图像为摄像头采集的图像,摄像头实时监控画面图像的分辨率为w×h像素,w取值为1280像素,h取值为720像素,金字塔式YOLO7算法对原始输入图像的w×h像素关键帧进行矩形窗口裁剪,矩形窗口裁剪的起点和终点分别标记为A(x
(1)、对历史检测的数据进行分析,获取最近7天的自适应权重的金字塔式YOLO7算法标记出的目标对象热点最大外接矩形区域的坐标,分别标记为S
(2)、将x
上式1)中,[n/2]为n/2向下取整;同理,将y
判断计算x
(3)、将x
同理将y
判断计算x
(4)、如果历史数据的时间累计天数小于7天,起点A的坐标设置为(1,1),终点B的坐标设置为(1280,720),也即是x
金字塔式YOLO7算法进行图像处理的流程如下:
(Ⅰ)、该笔芯6螺杆泵进行胰岛素药液注射工作时,智能控制模块每间隔10ms获取一次摄像头采集到的图像,金字塔式YOLO7算法判断图像阈值是否大于5ml/hour,如果大于5ml/hour,转入下一步骤(Ⅱ),否则继续执行当前步骤(Ⅰ);
(Ⅱ)、如果当前注射的量不足笔芯6容量的二分之一,获取摄像头当前时刻的关键帧通过矩形窗口裁剪后的图像,记作图像A;以当前时刻为起点,获取前500ms和前2秒的关键帧通过矩形窗口裁剪后的图像,分别记作图像B和C,转入下一步骤(Ⅲ);
(Ⅲ)、首先,金字塔式YOLO7算法对图像A进行YOLO7的目标对象检测,计算当前图像中存在注射量为小于等于0、大于0小于1/2和1的最大概率,标记为P{a, b, c},YOLO7算法提前离线针对上述三种目标进行过训练;进一步,对图像A按长度和宽度方向进行2等分,分割成A
其中,w1…w9为权重,其值随YOLO7的检测结果动态变权,其计算如下式6)~8):
(Ⅳ)、接着,参照对图像A进行自适应权重的金字塔式YOLO7方法,对图像B和C进行处理,获取图像B和C最终的目标检测概率,记作P
(Ⅴ)、取出所述三幅图像A、B和C所对应的最终的目标检测概率P
(Ⅵ)、检测完毕后,重新进入下一轮的检测,转入步骤(Ⅰ)进行处理。
本发明的驱动筒17的上端部内圆设有第一内螺纹19,一级管式螺杆16的外圆沿轴向设有与第一内螺纹19螺纹配合的第一外螺纹20,一级管式螺杆16的上端部内圆设有第二内螺纹21,二级管式螺杆28的外圆沿轴向设有与第二内螺纹21螺纹配合的第二外螺纹29,第一内螺纹19、第一外螺纹20、第二内螺纹21和第二外螺纹29均为螺距相同的梯形螺纹,那么驱动筒17旋转一圈即可实现一级管式螺杆16或二级管式螺杆28伸出或收缩一个螺距的长度,能精确控制胰岛素药液的注射量,实现高精度给药,显著减小整体尺寸,那么在整个胰岛素药液注射过程中,智能控制模块通过采集位置传感器38的信号即可计算驱动筒17的旋转圈数,智能控制模块根据驱动筒17的旋转圈数获得一级管式螺杆16向上移动的距离,同时智能控制模块采用金字塔式YOLO7算法对摄像头采集的图像进行处理,识别芯活塞7的位置,进而测量笔芯6内胰岛素药液的已注射量,智能控制模块控制动力马达36改变转动力矩和速度,减轻一级管式螺杆16和驱动筒17之间的冲击力度;智能控制模块还内置有二级螺杆伸缩机构的软限位,其软限位参数由一级管式螺杆16和二级管式螺杆28的几何参数:螺距、总长度和工作长度确定,因而,在二级管式螺杆28下端部内壁上的第二限位卡块向上滑动到第二限位卡槽的上端处并被拉住及二级管式螺杆28向下收缩到一级管式螺杆16中并下移至下极限位置时,智能控制模块立刻控制动力马达36停止转动,避免二级管式螺杆28被拉紧或二级管式螺杆28进入一级管式螺杆16内过紧而导致锁死,同时也避免动力马达36出现过载而导致其输出轴扭矩过大受损情况的发生,起到保护动力马达36、一级管式螺杆16和二级管式螺杆28的作用。
本发明装填胰岛素药液时,动力马达36通过马达齿轮37和驱动齿轮26带动驱动筒17反转,使一级管式螺杆16向下收缩到驱动筒17中,由于一级管式螺杆16的上端部外圆固定套装有位于驱动筒17上端上方的限位环22,驱动筒17的上端面设有一块向上凸的第一楔形扣23,限位环22的下端面设有一块向下凸的第二楔形扣24,限位环22的上端面设有一块向上凸的第三楔形扣25,限位螺杆塞30的底部外边缘设有一块向下凸的第四楔形扣31,当一级管式螺杆16向下收缩到驱动筒17中并下移至下极限位置时,第二楔形扣24与第一楔形扣23啮合,此时,一级管式螺杆16便随驱动筒17一起反向转动,避免一级管式螺杆16进入驱动筒17内过深或过紧而导致锁死,一级管式螺杆16与二级管式螺杆28相对转动,一级管式螺杆16通过第二内螺纹21和第二外螺纹29驱使二级管式螺杆28向下收缩到一级管式螺杆16中,同理当二级管式螺杆28向下收缩到一级管式螺杆17中并下移至下极限位置时,第四楔形扣31与第三楔形扣25啮合,此时,二级管式螺杆28无法继续向下收缩到一级管式螺杆16中,由于第二楔形扣24与第一楔形扣23啮合、第四楔形扣31与第三楔形扣25啮合,进而可以在结构上起到防锁死作用。
电源模块、智能控制模块、注射针头和摄像头在图中均未示,电源模块、智能控制模块、按键操作模2、动力马达36、注射针头和摄像头均为常规技术,具体构造和工作原理不再赘述,本发明的智能控制模块内置的控制及计算方法为常规技术,不涉及新的计算机程序。
以上实施例仅用以说明而非限制本发明的技术方案,尽管参照上述实施例对本发明进行了详细说明,本领域的普通技术人员应当理解;依然可以对本发明进行修改或者等同替换,而不脱离本发明的精神和范围的任何修改或局部替换,其均应涵盖在本发明的权利要求范围当中。
- 一种用于笔式胰岛素注射器上的胰岛素笔芯
- 一种笔式胰岛素注射器常规胰岛素专用笔芯