海尔贝克阵列
文献发布时间:2023-06-19 09:33:52
本申请要求2016年6月1日提交的U.S.S.N 15/170,864的优先权并要求其权益,其通过引用并入本文。
根据美国能源部与劳伦斯利弗莫尔国家安全有限责任公司(Lawrence LivermoreNational Security,LLC)之间的针对劳伦斯利弗莫尔国家实验室的运作的合同号DE-AC52-07NA27344,美国政府拥有本发明中的权利。
【技术领域】
本技术涉及无源磁轴承,并且更具体地,其涉及用于这种轴承的径向稳定的部件。更详细地,本技术是用于无源磁轴承的海尔贝克阵列(Halbach-Array)径向稳定器。
【背景技术】
需要一种改进的径向稳定器,用于稳定悬浮无源轴承元件以防止横向移位。克服旋转型不稳定性的部件将尤其有益。还想要的是,稳定器设计包括用于通过发信号通知在任何重大故障之前预期的平衡变化的开始来连续地监控转子的健康状态的部件。
【发明内容】
本文的技术涉及用于无源磁轴承的径向稳定器。在本发明人的美国专利No.5,847,480“Passive Magnetic Bearing Element with Minimal Power Losses”中描述了示例性径向稳定器。本发明涉及将稳定器的定子绕组细分为四个象限绕组。这些象限绕组的几何上相对的对然后以相反的串联连接,使得当绕组的轴和海尔贝克阵列重合时,在该电路的末端处测量的感应电压在该“零”位置处接近零,但是随着轴线的移位而呈指数地增加。为了完成电路并实现本发明的一个目的,连接电感以完成每个象限对的电路。通过在这两个电感中使用不相似的值,使稳定器的径向刚度成为各向异性的。径向刚度上的各向异性强烈地稳定而防止转子/轴承系统的所谓“旋转”不稳定性,这种不稳定性可能由机械滞后或移位相关的阻力(drag force)引起。本技术的另一个新方面是通过电子监控每个象限绕组对的电压输出来实现的。任何观察到的这两个电压的比率上或其波形上的变化都将以信号表明转子/轴承系统平衡的变化,诸如,将作为例如这些部件中的结构变化以及复合转子中的纤维的内部破裂的结果而发生的。这样的信号将代表转子系统可能发生重大故障的早期警告。然后,可以使用该信息在发生此类故障之前触发系统的关闭。
【附图说明】
结合到本公开中并形成本公开的一部分的随附的附图图示了本发明的实施例,并且与说明书一起用于解释本发明的原理。
图1是本发明的径向稳定器的示意图,并且包括海尔贝克阵列和象限绕组支撑件的视图。
图2是一个象限绕组和稳定器绕组支撑件的几何形状的示意图。
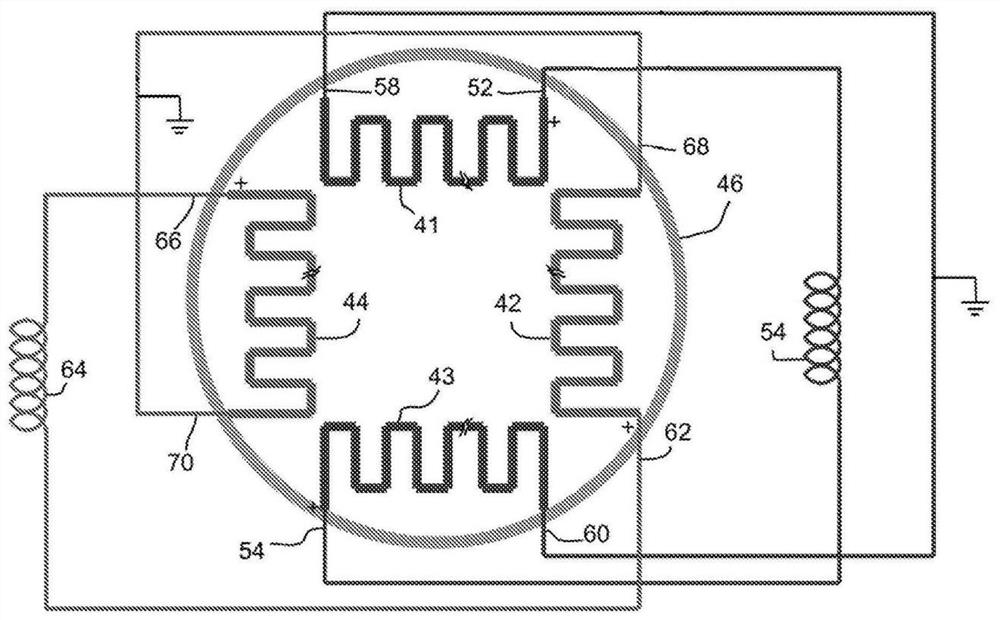
图3示出了用于本发明的径向稳定器绕组的电连接示意图。
图4示出了各向异性刚度径向稳定器的示意图。
【具体实施方式】
海尔贝克阵列稳定器和无源磁轴承系统在美国专利No.5,847,480“PassiveMagnetic Bearing Element with Minimal Power Losses”中有所描述。本发明包括径向稳定器的实施例,该径向稳定器具有优于上面专利中公开的径向稳定器的优点,并且特别适用于用于飞轮储能系统中的无源磁轴承。本发明的一个方面是通过经稳定器绕组系统的电路修改而引入各向异性刚度来抑制转子动态不稳定性。本发明的另一个方面是它采用来自经修改的绕组的电信号来感测飞轮转子的初始故障模式,这导致转子平衡上的变化。因此,除了在稳定无源轴承系统防止横向移位的作用外,新的稳定器可以帮助稳定转子的所谓“旋转”不稳定性,并且同时检测转子平衡上的变化,这可以用信号表明转子和/或附接在其上的元件的初始机械故障。
在图1中示意性地示出了该概念的几何形状。在顶部(或端部)视图中,示出了最外面的圆柱形物体,海尔贝克阵列10,其典型地安装在转子的内表面上(未示出)。来自海尔贝克阵列的磁场集中在阵列的内表面附近,在这里它可以与位于稳定器的支撑件12上的特殊绕组强烈地相互作用。支撑件12在附图中被示出为圆柱形元件,其半径略小于海尔贝克阵列的内表面的半径。因此,在支撑件12与海尔贝克阵列10之间存在间隙16。海尔贝克阵列在本领域中是已知的,并且在本领域的技术范围内的是,将海尔贝克阵列的永磁体布置成将磁场集中在阵列的内表面附近。在图中仅示出了这种阵列的一个永磁体14。如在附图中可以看到的,稳定器被分成四个象限区域(1、2、3、4),如下描述的那样,分区被用于产生稳定器的上述各向异性径向刚度。在替代的实施例中,海尔贝克阵列贴附在内支撑件上,并且其磁场向外指向。在该替代的实施例中,绕组在它们各自的象限中位于转子的内表面上,该内转子被配置成围绕相对静止的海尔贝克阵列旋转。
图2是上述象限绕组中的一个象限绕组的示意图。如侧视图中示出的,绕组20具有锯齿形状,其中每个侧边之间的间隔与海尔贝克阵列的半波长一致。每个象限绕组的端部连接到导体,该导体通过绝缘套管离开真空室,用于连接到待描述的外部电路元件。
每个象限绕组将产生AC输出电压,随着海尔贝克阵列相对于支撑绕组的静止的圆柱形元件的径向移位,该AC输出电压将在幅度上呈指数地增长。在支撑件结构12的一侧上,这种径向移位将使该象限的绕组与海尔贝克阵列之间的间隙变窄。在相对的象限与海尔贝克阵列之间间隙将对应地增加。在海尔贝克阵列的中心位置(相对于该圆柱体的轴线)中,除了相位之外,彼此成180°定位的象限的输出电压将是相同的。因此,如果这些相对的象限绕组然后以相对的串联而连接,则当海尔贝克阵列相对于绕组支撑圆柱体而居中时,它们的输出将接近零。然后,该输出也将随着海尔贝克阵列在这两个相对的象限中的任一个的方向上的横向移位而从零开始呈指数地增长。
为了控制在电连接的象限绕组对中流动的电流,电感与来自每对绕组的引线串联连接。这两个电感在设计中起着重要作用。首先,它们控制稳定器的净刚度,与此同时它们控制在横向移位时发生的绕组中的欧姆损耗。其次,通过为两个电感选择不同的值,稳定器的刚度成为各向异性的。各向异性的刚度作为防止所谓的“旋转不稳定性”的强稳定器,该“旋转不稳定性”可能作为旋转元件内的机械滞后或由取决于移位的阻力产生的机械力矩的结果而在轴承支撑的旋转系统中发生。
图3是用于本发明的电连接示意图。虽然象限绕组被示出为共同形成正方形,但是本发明中的绕组形成在支撑件结构的圆形外壁上,并且因此围绕圆形外壁弯曲。绕组被标记为41至44。所有绕组都位于真空容器46内。绕组41具有连接到电感器54的正极引线52,电感器54连接到绕组43的正极引线54。绕组41和43的负极引线58和60分别连接在一起,并且可选地可以连接到地。绕组42具有连接到电感器64的正极引线62,电感器64连接到正极引线66,该正极引线66连接到绕组44。绕组42和44的负极引线68和70分别连接在一起,并且可选地可以连接到地。为了实现各向异性,电感器54和64的值是不相似的。注意,绕组段的长度可以设定为适应任何尺寸的定子。因此,定子越大,则其象限中的每个象限以及每个象限上的绕组的长度则越大。
独立于象限绕组在提供正径向刚度以克服悬浮轴承的负刚度上的稳定作用,它们可以执行另外的非常不同且非常重要的作用。这个作用是提供用于连续地监控转子的平衡状态的手段,并且从而能够及时感测与转子初始灾难性故障关联的平衡上的任何突然变化(或系统转子动力学上的使其更接近不稳定性阈值的任何变化),以便在发生重大故障之前关闭系统。该感测动作将通过将象限绕组的输出引线连接到电子电路来实现,该电子电路能够发信号表明一个或多个绕组的输出的幅度上的任何突然变化,诸如将作为由于小的内部故障所致的转子中的任何结构变化的结果而发生的。因此,这样的信号可以对初始的重大故障提供早期的警告。
本文中提供了另一种技术,用于稳定横向类型的旋转不稳定性和更为深奥形式的旋转不稳定性“倾斜不稳定性”,其可以作为陀螺章动效应的结果而出现。对横向导向的旋转运动的稳定作用由以下原因而引起:对以上描述的稳定器进行修改以产生具有各向异性刚度的稳定器,即,造成稳定器的正刚度(负力导数)对于比如“x”方向上的移位而言将比其在“y”方向(即垂直于前者)上的移位更大,。对于纯粹横向的移位(即,没有倾斜运动)而言,描述旋转物体的重心上的力的等式(在没有阻尼力的情况下)是如下给出的:
这里K
对上述等式的解的理论分析产生稳定性标准,该稳定性标准指定足以确保抵抗横向旋转的稳定性的刚度各向异性的程度(K
或者,
如果阻力系数与刚度系数相比较小(即,a< 为了实现本发明的第一目的,即,稳定而防止横向旋转,建议在方位角上调整感应电路之间的间隔,即,使得绕组之间的间隔在一个轴(比如说在x轴)的方向上最小,增加到针对接近y轴的正或负方位角变化的更宽的间距。针对其中海尔贝克阵列围绕固定绕组旋转的情况,在随附的附图上示出了这种效果(以夸大的形式)。图4示出了固定电路阵列80,其周围定位有可旋转的海尔贝克阵列82。注意在位置84处的电路之间的与在位置86处的更宽间隔相比的更窄的间隔。 替代实施例(未示出)是其中海尔贝克阵列静止并且位于(旋转的)绕组内部的实施例。在这种情况下,绕组的方位角间隔将是均匀的,但海尔贝克阵列的场的方位角波长和/或强度将通过随方位角逐渐改变磁棒的厚度来调整。径向方向上的厚度的变化将调整场的强度;方位角方向上的厚度调整将改变波长。在任一情况下,参数的调整都要在固定的元件上执行。 上述方法将实现本发明的一个目的,即,横向旋转运动的稳定。本发明的第二个目的是通过选择几何形状来实现倾斜旋转运动的稳定。理论示出(由T.K.Fowler,R.F.Post和D.D.Ryutov的分析)如果在旋转元件上产生的阻力是由静止的物体产生的,在该静止物体外面存在产生阻力的旋转元件(在此残余阻力由第一种情况下的旋转海尔贝克阵列产生,或第二种情况下的绕组产生),然后通过适当调节参数,可以稳定横向和倾斜型旋转。 已经出于说明和描述的目的而呈现了本发明的前述描述,并且不旨在穷举或将本发明限制于所公开的精确形式。更具上述教导,许多修改和变化都是可能的。所公开的实施例仅意欲解释本发明的原理及其实际应用,从而使得本领域的其他技术人员能够在各种实施例中以及适合于预期的特定用途的各种修改中最好地使用本发明。本发明的范围由以下权利要求限定。 优选地包括本文所述的所有元件、部件和步骤。要理解的是,这些元件、部件和步骤中的任何一个可以由其他元件、部件和步骤代替,或者完全删除,这对于本领域技术人员来说是显而易见的。 概括地说,该文献至少公开了以下内容:提供了径向稳定器,用于稳定悬浮无源轴承元件以防止横向移位。稳定器提供了用以在稳定器的径向刚度上引入各向异性的部件。各向异性刚度的存在对旋转类型转子-动态不稳定性具有强烈的稳定作用。稳定器设计还提供了用于通过发信号表明在任何重大故障之前预期的平衡变化的开始来连续监控转子的健康状态的部件。
本文还至少提出了以下概念: 1、一种装置,包括: 具有外壁的圆柱体,其被表征为具有四个象限并且进一步具有中心纵向轴线; 位于每个象限上的单独绕组,其中位于几何上相对的象限上的绕组的正输出连接在一起; 转子,其被配置成围绕所述圆柱体旋转;以及 海尔贝克阵列,其附接到所述转子的内壁并且被配置成将其磁场集中在阵列的内表面附近。 2.根据概念1所述的装置,进一步包括:第一电感器和第二电感器,第一电感器连接在位于几何上相对的象限上的第一组绕组的正输出之间,第二电感器连接在位于几何上相对的象限上的第二组绕组的正输出之间。 3.根据概念1或2所述的装置,其中所述海尔贝克阵列被配置成将其磁场集中在内部附近,其中当转子旋转并且所述转子的旋转中心与所述中心纵向轴线重合时,经连接的绕组之间的感应电压接近于零,并且其中当转子旋转并且所述转子的旋转中心与所述中心纵向轴线不重合时,经连接的绕组之间的感应电压随着轴线的移位呈指数地增长。 4.根据概念2所述的装置,其中所述海尔贝克阵列被配置成将其磁场集中在内部附近,其中当转子旋转并且所述转子的旋转中心与所述中心纵向轴线重合时,经连接的绕组之间的感应电压接近于零,并且其中当转子旋转并且所述转子的旋转中心与所述中心纵向轴线不重合时,经连接的绕组之间的感应电压随着轴线的移位呈指数地增长。 5.根据概念2所述的装置,其中第一电感器的电感不同于第二电感器的电感。 6.根据前述概念中任一项所述的装置,其中每个所述单独绕组包括锯齿形的图案。 7.根据概念6所述的装置,其中所述锯齿形的图案包括方波图案或矩形波图案。 8.根据概念7所述的装置,其中所述图案的每个侧边之间的间隔与所述海尔贝克阵列的半波长一致。 9.根据前述概念中任一项所述的装置,进一步包括用于电子地监控绕每个象限绕组对的电压输出的部件。 10.一种装置,包括: 具有外壁和中心纵向轴线的圆柱体,其中所述外壁可以被表征为具有四个象限,所述四个象限完全跨越所述外壁的圆周,使得第一象限与第二象限相邻,第二象限与第三象限相邻,第三象限与第四象限相邻,第四象限与所述第一象限相邻,其中所述第一象限在关于所述轴线的与所述第三象限的相对侧,并且其中所述第二象限在关于所述轴线的与所述第四象限的相对侧; 第一绕组位于所述第一象限上而不是其它象限上,所述第一绕组具有第一负极引线和第一正极引线,其中所述第一负极引线接地; 第二绕组位于所述第二象限上而不是其它象限上,所述第二绕组具有第二负极引线和第二正极引线,其中所述第二负极引线接地; 第三绕组位于所述第三象限上而不是其它象限上,所述第三绕组具有第三负极引线和第三正极引线,其中所述第三负极引线接地,其中所述第一正极引线与所述第三正极引线连接在一起; 第四绕组位于所述第四象限上而不是其它象限上,所述第四绕组具有第四负极引线和第四正极引线,其中所述第四负极引线接地,其中所述第二正极引线与所述第四正极引线连接在一起; 转子,其被配置成围绕所述圆柱体旋转;以及 海尔贝克阵列,其附接到所述转子的内壁并且被配置成将其磁场集中在阵列的内表面附近。 11.根据概念10的装置,进一步包括: 第一电感器,其具有第一电感器引线和第二电感器引线;以及 第二电感器,其具有第三电感器引线和第四电感器引线,其中所述第一正极引线连接到所述第一电感器引线,其中所述第二电感器引线连接到所述第三正极引线,其中所述第二正极引线连接到所述第三电感器引线,并且其中所述第四电感器引线连接到所述第四正极引线。 12.根据概念10所述的装置,其中所述海尔贝克阵列被配置成将其磁场集中在阵列的内表面附近,使得所述磁场可以与所述第一绕组、所述第二绕组、所述第三绕组和所述第四绕组相互作用,其中当转子旋转并且所述转子的旋转中心与所述中心纵向轴线重合时,(i)所述第一正极引线与所述第三正极引线之间的感应电压接近于零,并且(ii)所述第二正极引线与所述第四正极引线之间的感应电压接近于零,并且其中当转子旋转时并且所述转子的旋转中心与所述中心纵向轴线不重合时,(i)所述第一正极引线与所述第三正极引线之间的感应电压随着轴线的移位而呈指数地增长,并且(ii)所述第二正极引线与所述第四正极引线之间的感应电压随着轴线的移位而呈指数地增长。 13.根据概念11所述的装置,其中所述海尔贝克阵列被配置成将其磁场集中在阵列的内表面附近,使得所述磁场可以与所述第一绕组、所述第二绕组、所述第三绕组和所述第四绕组相互作用,其中当转子旋转并且所述转子的旋转中心与所述中心纵向轴线重合时,(i)所述第一正极引线与所述第三正极引线之间的所述感应电压接近于零,以及(ii)所述第二正极引线与所述第四正极引线之间的感应电压接近于零,并且其中当转子旋转并且所述转子的旋转中心与所述中心纵向轴线不重合时,(i)所述第一正极引线与所述第三正极引线之间的感应电压随着轴线的移位而呈指数地增长,并且(ii)所述第二正极引线与所述第四正极引线之间的感应电压随着轴线的移位而呈指数地增长。 14.根据概念11至13中任一项所述的装置,其中所述第一电感器的电感不同于所述第二电感器的电感。 15.根据概念10至14中任一项所述的装置,其中所述第一绕组、所述第二绕组、所述第三绕组和所述第四绕组中的每个包括锯齿形的图案。 16.根据概念15所述的装置,其中锯齿形的图案包括方波图案或矩形波图案。 17.根据概念16所述的装置,其中每个侧边之间的间隔与所述海尔贝克阵列的半波长一致。 18.根据概念10至17中任一项所述的装置,其中从每个绕组的负极引线到正极引线的方向在所述外壁周围是相同的。 19.根据概念10至18中任一项所述的装置,其中所述第一正极引线与所述第二负极引线相邻,其中所述第二正极引线与所述第三负极引线相邻,其中所述第三正极引线与所述第四负极引线相邻,其中所述第四正极引线与所述第一负极引线相邻。 20.根据概念10至19中任一项所述的装置,进一步包括用于电子地监控每个象限绕组对的电压输出的部件。
- 一种海尔贝克磁体的制备方法、海尔贝克磁体及电子设备
- 海尔贝克阵列式磁悬浮密度测量的方法及装置