一种飞行器不失速浮动升力翼面及其实现方法
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及飞行器技术领域,特别是一种飞行器不失速浮动升力翼面及其实现方法。
背景技术
固定翼飞行器机翼与机身固定连接,飞行过程中存在攻角过大的失速风险,有可能导致飞行器坠毁。在动力系统推力方向与机身平行的垂直起降固定翼飞行器上,其垂直模式与水平模式转换时,机翼存在失速过程,从而不能平稳完成模式转换;在载人固定翼飞行器上,成员仓与机翼固联,起降阶段机舱存在较大的俯仰角,影响乘坐舒适性。
发明内容
本发明的目的在于提供一种飞行器不失速浮动升力翼面及其实现方法,消除飞行器升力失速风险,使飞行器无论在何种飞行姿态下升力均不失速,为飞行器提供稳定升力。
实现本发明目的的技术解决方案为:一种飞行器不失速浮动升力翼面,包括浮动升力翼面、连接转轴、攻角调节舵面,其中:
所述浮动升力翼面为攻角独立浮动的升力翼面,用于产生飞行器所需的气动升力,且气动攻角与机身俯仰姿态角相互独立;
所述连接转轴用于连接浮动升力翼面与机身,浮动升力翼面和机身的俯仰角相互独立,浮动升力翼面能够绕连接转轴相对于机身俯仰自由转动;
所述攻角调节舵面用于调节浮动升力翼面的飞行攻角,实现浮动升力翼面稳定在设定攻角,保证飞行过程中翼面不失速。
进一步地,所述连接转轴与浮动升力翼面固定连接,连接转轴全轴穿过机身悬吊于机身上。
进一步地,所述连接转轴与浮动升力翼面固定连接,连接转轴半轴连接机身。
进一步地,所述连接转轴能够相对于机身在俯仰自由度上旋转,实现翼面升力的传递。
进一步地,所述攻角调节舵面为安装在浮动机翼上的调节舵面。
进一步地,所述攻角调节舵面为外延到机翼外的调节舵面。
一种飞行器不失速浮动升力翼面的实现方法,具体如下:
连接转轴与浮动升力翼面固定连接,浮动升力翼面通过连接转轴连接于机身,浮动升力翼面和机身的俯仰角相互独立,浮动升力翼面绕连接转轴相对于机身俯仰自由转动;
飞行器飞行时,浮动机翼的攻角只与飞行速度方向有关,与机身的姿态无关,通过调节攻角调节舵面实现飞行器所需升力大小的调节,并且浮动机翼攻角自适应平衡在攻角调节舵面所设定的攻角上。
进一步地,该浮动升力翼面应用在垂直起降飞行器时,起飞过程如下:
首先为垂直起飞初始状态,飞行器垂直向上飞行到设定高度;
其次为垂直转水平加速状态,飞行器垂直向上速度逐步降低,水平飞行速度逐步增大,浮动升力翼面攻角自适应飞行合速度矢量方向,攻角大小受控于攻角调节舵面,使飞行器在垂直转平飞过程中保持升力翼面的升力效率;
最后为平飞状态,完成垂直到平飞的转换,平飞状态浮动升力翼面的攻角大小仍通过攻角调节舵面控制,或者将浮动升力翼面与机身转动自由度锁止,转换为常规固定翼飞行器。
本发明与现有技术相比,其显著优点为:(1)浮动升力翼面与机身通过转轴连接,实现浮动升力翼面与机身攻角的相互独立,通过调节舵面控制翼面攻角,规避了飞行器(浮动升力翼面)机翼的失速问题,提升了飞行器的安全性;(2)对于垂直起降飞行器(VTOL),在垂直和平飞的模态转换中,避免了浮动升力翼面的失速问题,从而实现了平稳的模态转换;(3)应用在载人飞行器时,能够实现乘客舱的全程水平或其他所需姿态,提高了乘坐舒适性,具有较高的实用价值。
附图说明
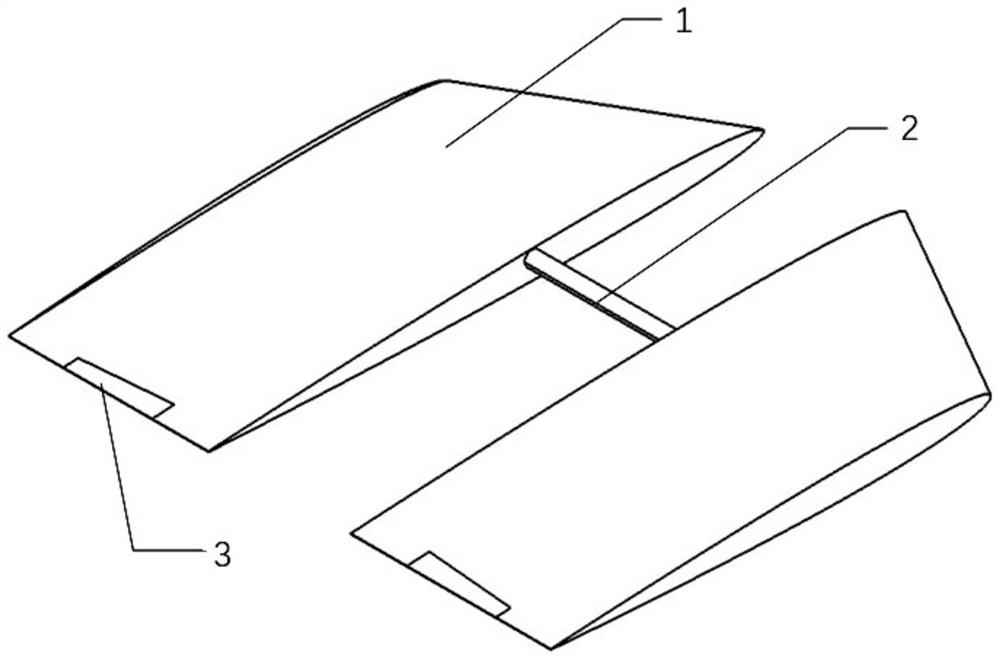
图1为本发明飞行器不失速浮动升力翼面的浮动机翼示意图。
图2为本发明飞行器不失速浮动升力翼面的浮动机翼安装到机身示意图。
图3为垂直起飞浮动机翼状态顺序图,其中(a)为垂直起飞初始状态图,(b)为垂直转水平加速1状态图,(c)为垂直转水平加速2状态图,(d)为完全平飞状态图。
具体实施方式
本发明涉及一种不失速飞行器翼面实现方法,通过将浮动升力翼面与机体俯仰自由度解除约束,达到翼面攻角与机体俯仰角相互独立,通过浮动升力翼面单独调节机构,调节浮动升力翼面气动攻角,并保持浮动升力翼面始终处于不失速的攻角范围内。
一般飞行器浮动升力翼面与机体均为固定连接,通过将浮动升力翼面与机体俯仰自由度解除约束,达到翼面攻角与机体俯仰角相互独立。可以将主浮动升力翼面与机体采用转轴连接,实现浮动升力翼面只传递升力,而不再传递俯仰力矩,实现机体与机翼俯仰自由度的相互独立。
在浮动升力翼面浮动的前提下,通过机构调节浮动升力翼面的配平攻角,实现浮动升力翼面的定攻角飞行,从而避免失速问题。调节浮动升力翼面的配平攻角主要通过气动外形的改变实现,可通过翼面后缘的附加舵面实现,也可以在翼面以外连接升降舵面实现。
本发明一种飞行器不失速浮动升力翼面,包括浮动升力翼面1、连接转轴2、攻角调节舵面3,其中:
所述浮动升力翼面1为攻角独立浮动的升力翼面,用于产生飞行器所需的气动升力,且气动攻角与机身4俯仰姿态角相互独立;
所述连接转轴2用于连接浮动升力翼面1与机身4,浮动升力翼面1和机身4的俯仰角相互独立,浮动升力翼面1能够绕连接转轴2相对于机身4俯仰自由转动;
所述攻角调节舵面3用于调节浮动升力翼面1的飞行攻角,实现浮动升力翼面稳定在设定攻角,保证飞行过程中翼面不失速。
进一步地,所述连接转轴2与浮动升力翼面1固定连接,连接转轴2全轴穿过机身4悬吊于机身4上。
进一步地,所述连接转轴2与浮动升力翼面1固定连接,连接转轴2半轴连接机身4。
进一步地,所述连接转轴2能够相对于机身4在俯仰自由度上旋转,实现翼面升力的传递。
进一步地,所述攻角调节舵面3为安装在浮动机翼上的调节舵面。
进一步地,所述攻角调节舵面3为外延到机翼外的调节舵面。
一种飞行器不失速浮动升力翼面的实现方法,具体如下:
连接转轴2与浮动升力翼面1固定连接,浮动升力翼面1通过连接转轴2连接于机身4,浮动升力翼面1和机身4的俯仰角相互独立,浮动升力翼面1绕连接转轴2相对于机身4俯仰自由转动;
飞行器飞行时,浮动机翼2的攻角只与飞行速度方向有关,与机身4的姿态无关,通过调节攻角调节舵面3实现飞行器所需升力大小的调节,并且浮动机翼2攻角自适应平衡在攻角调节舵面3所设定的攻角上。
进一步地,该浮动升力翼面应用在垂直起降飞行器时,起飞过程如下:
首先为垂直起飞初始状态,飞行器垂直向上飞行到设定高度;
其次为垂直转水平加速状态,飞行器垂直向上速度逐步降低,水平飞行速度逐步增大,浮动升力翼面1攻角自适应飞行合速度矢量方向,攻角大小受控于攻角调节舵面3,使飞行器在垂直转平飞过程中保持升力翼面的升力效率;
最后为平飞状态,完成垂直到平飞的转换,平飞状态浮动升力翼面1的攻角大小仍通过攻角调节舵面3控制,或者将浮动升力翼面1与机身4转动自由度锁止,转换为常规固定翼飞行器。
下面结合附图及具体实施例对本发明做进一步详细描述。
实施例
如下图1所示为浮动机翼的下图为本发明原理示意图,主要由浮动升力翼面1、连接转轴2、攻角调节舵面3三部分构成,其中浮动升力翼面1用于产生飞行器所需的气动升力,连接转轴2用于与机身4连接,连接后仍能够自由绕转轴转动,攻角调节舵面3用于调节浮动升力翼面的飞行攻角。
所述浮动升力翼面1为攻角独立浮动的升力翼面,用于产生飞行器所需的气动升力,且气动攻角与机身俯仰姿态角相互独立;所述连接转轴2用于连接浮动升力翼面1与机身,传递翼面升力,浮动升力翼面1和机身的俯仰角相互独立,浮动升力翼面1能够绕连接转轴2相对于机身俯仰自由转动;所述攻角调节舵面3用于调节浮动升力翼面1的飞行攻角,实现浮动升力翼面1稳定在设定攻角,保证飞行过程中翼面不失速,攻角调节舵面3的实现采用常规舵面结构,不再赘述。
所述连接转轴2与浮动升力翼面1固定连接,连接转轴2可以全轴穿过机身4、悬吊于机身上下面,也可以半轴连接机身,其核心在于连接转轴2能够相对于机身4在俯仰自由度上自由或/且受限旋转,并实现翼面升力的可靠传递。
所述攻角调节舵面3为安装在浮动升力翼面1上的调节舵面,攻角调节舵面3也可以是外延到机翼外的调节舵面。
图2为浮动升力翼面安装到飞行器上的示意图,4为机身,5为动力装置,浮动机翼通过转轴2连接到机身4,飞行器飞行时,浮动升力翼面1的攻角只与飞行速度方向有关,与机身4的姿态无关,飞行器调节所需升力大小通过调节攻角调节舵面3实现,并且浮动升力翼面1攻角自适应平衡在攻角调节舵面3所设定的攻角上,从而避免了翼面失速风险。
图3为浮动升力翼面应用在垂直起降飞行器上的应用,图3(a)为垂直起飞初始状态图,飞行器垂直向上飞行到一定高度,图3(b)、(c)为垂直转水平加速状态图,此时飞行器垂直向上速度逐步降低,水平飞行速度逐步增大,浮动升力翼面(1)攻角自适应飞行合速度矢量方向,攻角大小受控于攻角调节舵面(3),从而保证飞行器在垂直转平飞过程中保持升力翼面处于高升力效率,图3(d)为转换至平飞的飞行状态,完成垂直到平飞的转换,平飞状态浮动升力翼面1攻角大小仍通过攻角调节舵面3控制,也可以将浮动升力翼面1与机身4转动自由度锁止,转换为常规固定翼飞行器。
由于本发明核心为攻角独立于机身俯仰角的浮动机翼,因此未描述飞行器机身应有的机身姿态稳定和调节机构,例如升降、俯仰、滚转等稳定翼面及控制舵面,或者矢量推力等实现机身姿态调节的方法。
- 一种飞行器不失速浮动升力翼面及其实现方法
- 用于形成飞行器升力的方法以及用于实现所述方法的机翼翼型(替代方案)