一种左转路口导向线及左转停止线设计方法
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及城市道路交叉口渠化技术,尤其涉及左转路口导向线及左转停止线的设计 方法。
背景技术
在左转许可相位交叉口,直行车流应当具有优先通行权,但左转车流的抢行穿越现象 频发,左转前导车会尽可能地选择靠近进口道的最短路径转向,使得潜在冲突点更加靠近 于自己,以确保能够在直行车辆前通过交叉口,进而引导了一个左转车队通过交叉口,使 得对向直行车流产生较大延误。
根据《城市道路交通标志和标线设置规范》(GB51038-2015),当平面交叉口范围较大、交通组织复杂或交通流冲突严重时应设置路口导向线。因此,可以考虑通过左转路口导向线线形的优化设计,对许可相位下的左转车辆在交叉口内的行驶轨迹进行引导和约束,降低其对直行车流的干扰。
目前国内外学者对于左转路口导向线设计方面的研究相对较少。目前为止,都尚无相 关文献给出左转路口导向线的具体设计方法。这就导致左转路口导向线在实际渠化施工过 程中缺乏理论依据,主要凭借施工人员经验,根据划线车在交叉口左转的轨迹来确定线形。 这样的设计方法没有考虑到交叉口几何条件以及避免左转车辆与对向直行车辆冲突的临 界条件,缺少对车辆轨迹的约束,会导致左转车辆抢先于直行车辆通过而发生冲突,降低 交叉口安全性。
然而,对于一些几何条件受限的交叉口来说,无法在交叉口内设计出符合最小转弯半 径要求的左转路口导向线。这时就要通过优化左转车道停止线位置来解决该问题。以前的 学者在停止线位置设置方面也有过一些研究,但这些停止线设置方法并没有考虑到左转路 口导向线的线形需求,也并非针对左转许可相位的交通环境而设计。
发明内容
本发明的目的是为了解决现有方法导致左转车辆抢先于直行车辆通过而发生冲突,降 低交叉口安全性,以及并没有考虑到左转路口导向线的线形需求,且易使左转车辆与侧向 进口道待行车辆、对向进口道右转车辆发生冲突的问题,而提出一种左转路口导向线及左 转停止线设计方法。
一种左转路口导向线及左转停止线设计方法具体过程为:
步骤一、确定交叉口坐标系及参数;
步骤二、确定左转路口导向线的约束条件;
步骤三、基于步骤二判断是否得到左转路口导向线,若得到左转路口导向线,就在已 有左转停止线位置的基础上施画左转路口导向线;若不能得到左转路口导向线,则执行步 骤四;
步骤四、令左转路口导线顺接内侧车道,改变停止线位置,重新获得左转路口导向线。
本发明的有益效果为:
本发明将提出一种科学合理的左转路口导向线设计模型,意在解决左转车流总是选择 靠近进口道的最短路径转向的现象,既能够保证车辆行驶有序,又能够使得交叉口内的空 间得到科学合理的应用。该模型的核心思想就是结合交叉口几何特性,通过设置冲突限制 点约束左转路口导向线线形,使得左转车辆晚于直行车辆到达冲突点,进而充分保证直行 车流的优先通行权,提高交叉口安全性;解决现有方法没有考虑到交叉口几何条件以及避 免左转车辆与对向直行车辆冲突的临界条件,缺少对车辆轨迹的约束,导致左转车辆抢先 于直行车辆通过而发生冲突,降低交叉口安全性的问题。
本发明将在左转路口导向线设计模型的基础上,考虑交叉口几何条件和冲突临界条 件,考虑左转路口导向线的线形需求,建立许可相位交叉口左转停止线位置设计模型。该 模型不仅可以应用于既有交叉口的渠化设计改造中,还可以为新建交叉口停止线位置的确 定提供理论依据;解决现有并没有考虑到左转路口导向线的线形需求,且易使左转车辆与 侧向进口道待行车辆、对向进口道右转车辆发生冲突的问题。
附图说明
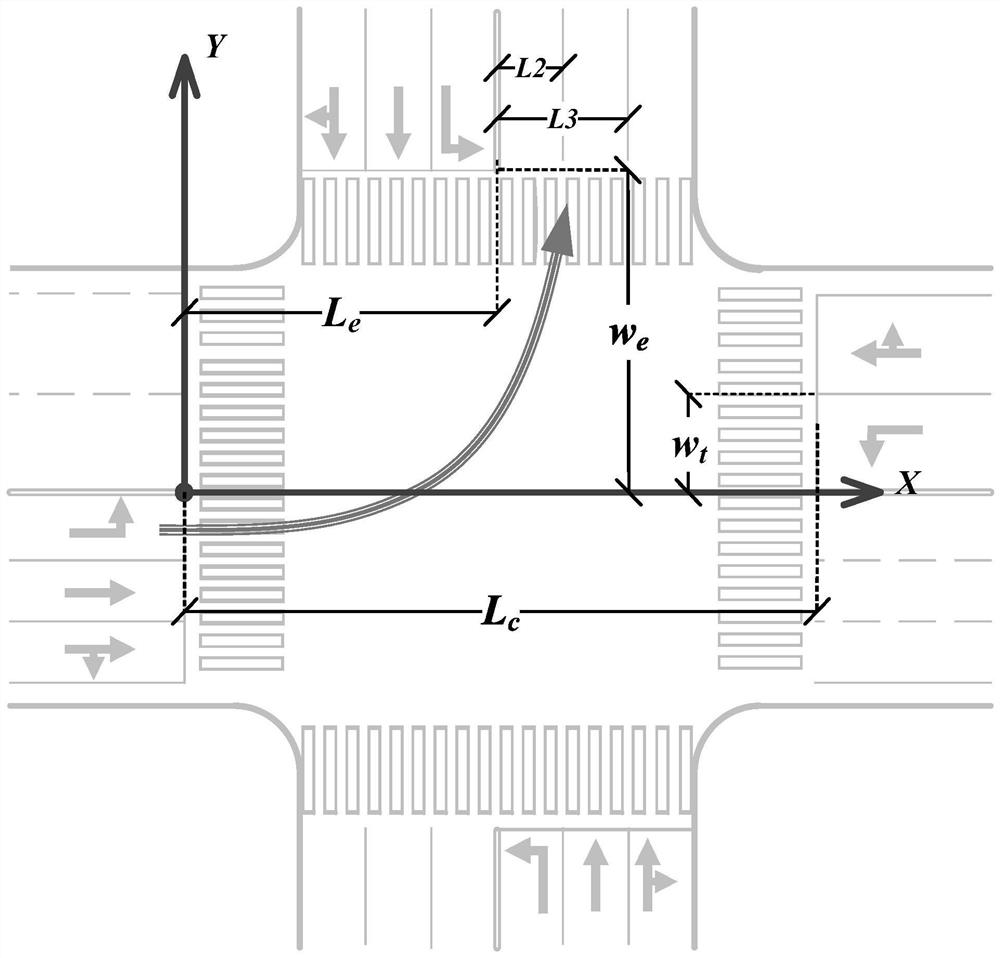
图1为本发明交叉口坐标系及几何参数图;
图2为冲突限制点的几何关系图;
图3为圆曲线参数与交叉口参数的几何关系图;
图4为无法对应出口道内侧车道时的左转路口导向线图;
图5为左转与右转车辆在出口道冲突交通流示意图;
图6为左转车辆与侧向进口道待行车辆冲突交通流示意图;
图7为停止线后置下交叉口的几何关系图;
图8为皓月大路-和平大街交叉口左转路口导向线设置效果图;
图9为建设街-北安路交叉口左转路口导向线设置效果图;
图10为东风大街-飞跃路交叉口停止线位置优化设计图。
具体实施方式
具体实施方式一:本实施方式一种左转路口导向线及左转停止线设计方法具体过程 为:
步骤一、确定交叉口坐标系及参数;
步骤二、确定左转路口导向线的约束条件;
步骤三、基于步骤二判断是否得到左转路口导向线,若得到左转路口导向线,就在已 有左转停止线位置的基础上施画左转路口导向线;若不能得到左转路口导向线,则执行步 骤四;
步骤四、令左转路口导线顺接内侧车道,改变停止线位置,重新获得左转路口导向线。
具体实施方式二:本实施方式与具体实施方式一不同的是,所述步骤一中确定交叉口 坐标系及参数;具体过程为:
为了便于量化研究,首先建立交叉口直角坐标系。如图1所示,以左转车辆进口道与 对向车行道分隔线所在直线为x轴,以该进口道左转车道停车线所在直线为y轴建立交叉 口直角坐标系,x轴正方向指向该左转车辆进口道正前方的出口道方向,y轴正方向指向该进口道左转车辆即将驶入的出口道的方向;
参数为:w
w
w
L
L
Li为从左转出口道所在道路对向车行道分隔线到出口道第i条车道的左侧边缘线的 距离(i=1时,L1=0,忽略不计);
由于左转路口导向线与交叉口的几何条件关系密切,为了表示出左转路口导向线与几 何条件之间的关系,利用前文中所建立的交叉口直角坐标系,确定交叉口内相关几何参数, 如表1所示。
表1左转路口导向线设计模型参数列表
其它步骤及参数与具体实施方式一相同。
具体实施方式三:本实施方式与具体实施方式一或二不同的是,所述步骤二中确定左 转路口导向线的约束条件;具体过程为:
根据左转车流在交叉口内的运动轨迹,左转路口导向线的设计应当重点考虑三个约束 点的位置:受到进口道位置约束产生的转向起始点、受出口道位置约束产生的转向结束点、 受到直行车流影响产生的冲突限制点。下面分别讨论各约束点的坐标取值。
(1)确定转向起始点坐标
转向起始点是左转车辆在交叉口进口道转向开始的地方,考虑到驾驶员在车辆左侧驾 驶,因此以约束左前轮的轨迹为目标建立左转路口导向线。这样,转向起始点即为停止线 与对向车行道分割线的交点,其坐标为(0,0);
(2)确定转向结束点坐标;
转向结束点是左转车辆转弯结束、驶离交叉口时的位置;
考虑到出口道车道数较少时,左转车辆与对向右转进该出口道的车辆存在交织冲突, 因此一般情况下引导左转车辆进入内侧车道行驶,根据左前轮的行驶轨迹,转向结束点即 为左转出口道与对向车行道分隔线的端点,其坐标为(L
(3)确定冲突限制点坐标;
将冲突限制点的坐标记为P(x
根据左转许可相位下的让行规则,左转路口导向线的设计需要保证左转车辆抵达潜在 冲突点的时间不早于对向直行车辆。也就是说,在假设左转和对向直行两股冲突车流速度 相同的条件下,要使左转车辆起始点O到潜在冲突点P的距离大于直行车辆起始点T到潜在冲突点P的距离,由于车辆是具有一定宽度的,当两车抵达冲突点时,比较左转车 辆左前轮的行驶距离和直行车辆右前轮的行驶距离,这样点P就一定位于直行车辆右前 轮的行驶轨迹上,即有
y
点P的横坐标x
OF
w
则x
其它步骤及参数与具体实施方式一或二相同。
具体实施方式四:本实施方式与具体实施方式一至三之一不同的是,所述步骤三中基 于步骤二判断是否得到左转路口导向线,若得到左转路口导向线,就在已有左转停止线位 置的基础上施画左转路口导向线;若不能得到左转路口导向线,则执行步骤四;具体过程 为:
交叉口车速较慢,驾驶员转向目的性明确,左转路口导向线主要起到约束轨迹的作用。 本着简化模型、便于应用的目的,不设置缓和曲线。所提出的左转路口导向线由直线段 OT
同时,根据前文分析,需要限定该圆曲线过冲突限制点P(x
[x-(L
根据交叉口的几何结构以及左转车辆行驶轨迹的需求,圆曲线
接下来,还需要确定半径r与交叉口几何参数之间的关系。
根据点P的坐标以及圆曲线的相切关系,可得
RQ
Q的坐标可以表示为(L
即
(r-w
整理后可得
可以看到,式(9)是关于r的一元二次函数,得到r的值就可以确定左转路口导向线的 解析式;
该函数解的分布情况需要对判别式Δ进行讨论:
①Δ>0时,有
整理后可得
L
这时,r存在两个实数根,即
同时,还需要保证点P位于该圆的第四象限部分,即点P在圆心R的右下侧,则有 约束条件
即半径r需满足
r≥max(L
如果r取较小的实数根,即有
将r与L
因此两个实数根中,较小的实数根不满足约束条件,应当取较大的实数根,因此可以 确定
②Δ=0时,有
可得
L
这时,点P为切点,与T
r=L
将式(4)代入,得
③Δ<0时,有
L
这时,冲突限制点P已经位于点E的右侧,说明如果要使左转机动车通过冲突限制点P,它就无法正常进入出口道内侧车道;这时就要考虑使左转路口导向线对应出口道的其它车道;这种情况下圆曲线半径r、冲突限制点P及各交叉口几何参数的关系如图4所 示。当对应第i条车道左侧边缘时,转向结束点E横坐标变为L
此时,圆心R坐标变为(L
类似地,根据几何关系推导,可以得到圆曲线半径r表达式为
除了以上三种情况外,还需要特别注意,根据《城市道路交叉口设计规程》(CJJ152-2010)对于交叉口路缘石转弯半径的设计要求,在设计速度为15km/h时,推荐 半径为10m。因此,在实际应用时,还需要检验圆曲线半径r的值是否满足最小半径要求, 如果圆曲线半径r(左转路口导线顺接内侧车道(即图3中的情况))满足最小半径要求, 则确定左转路口导向线;
如果圆曲线半径r(左转路口导线顺接内侧车道(即图3中的情况))不满足最小半径要求,将左转路口导向线顺接出口道下一条车道,计算圆曲线半径r,检验圆曲线半径 r的值是否满足最小半径要求,如果满足最小半径要求,则确定左转路口导向线;如果不 满足最小半径要求,将左转路口导向线顺接出口道下一条车道,计算圆曲线半径r,检验 圆曲线半径r的值是否满足最小半径要求,如果满足最小半径要求,则确定左转路口导向 线;如果不满足继续执行(将左转路口导向线顺接出口道下一条车道,计算圆曲线半径r, 检验圆曲线半径r的值是否满足最小半径要求,),直至判断完所有车道;
如果左转路口导线顺接出口道所有(即图3中的情况)车道,圆曲线半径r都不满足最小半径要求,则执行步骤四;
当然,对于部分交叉口,也可能会出现顺接其它车道也无法满足最小半径要求。这时, 就需要进一步考虑对左转车道停止线的位置进行优化设计。
其它步骤及参数与具体实施方式一至三之一相同。
具体实施方式五:本实施方式与具体实施方式一至四之一不同的是,所述最小半径要 求为大于等于10m。
其它步骤及参数与具体实施方式一至四之一相同。
具体实施方式六:本实施方式与具体实施方式一至五之一不同的是,所述步骤四中令 左转路口导线顺接内侧车道,改变停止线位置,重新获得左转路口导向线;具体过程为:
在许可相位交叉口设置左转路口导向线,可以很好地约束左转车辆的行为,规范交叉 口行车秩序。但对于一部分交叉口,受到自身几何条件的制约,仅仅在现有渠化设计方案 上增加左转路口导向线,无法满足设置要求,主要有以下三种情况。
①对于部分尺寸较小的交叉口,尤其是支路-支路相交交叉口。其内部空间较小,转 向空间不足,左转车流对应的出口道甚至仅有一条车道,在现有标线基础上难以施画出满 足最小半径需求和冲突限制点约束的左转路口导向线。这时,就要考虑通过停止线后置的 方式来扩大转向空间,为施画合适的左转路口导向线提供空间条件。
②对于一些左转路口导向线无法顺接内侧车道的交叉口,虽然能够将左转路口导向线 顺接至其它车道,但是却很可能导致左转车辆与对向右转车辆汇入同一条车道。在右转交 通量较大时,交织冲突极为严重,影响了交叉口运行效率,如图5所示。在这种条件下,就需要考虑通过改变进口道停止线位置,使得左转路口导向线能够顺接出口道内侧车道,从而避免左转车辆与右转车辆发生冲突。
③除此之外,对于一些道路几何结构特殊的交叉口,还有可能出现左转路口导向线上 的切点T
对于左转车辆进口道停止线位置的确定来说,在图1中所建立的交叉口坐标系横坐标 原点将发生变化,L
L
式中,ΔL为交叉口内左转出口道所在道路对向车行道分隔线到对向进口道停止线间 的距离;
因此,只要确定了L
首先,将式(8)变形,可以得到
根据式(13),为满足点P在圆的第四象限,有r≥L
将式(4)和式(25)代入到式(27)中,可以得到
整理后,有
可以得到关于L
对于一般的交叉口来说,必有ΔL>w
通过计算可以得到,该函数的对称轴表达式为
根据交叉口的几何关系,有L
可以根据交叉口设计需求,确定r值;这个是指根据《城市道路交叉口设计规程》(CJJ152-2010)速度与半径的对应关系选取。如果想要转向速度达到20km/h,就在规范 中找到所对应的半径值进行设计;如果是30km/h,就在规范中找到30km/h所对应的半径 值。对于转向速度值的选取,根据管理部门的需求确定。
在新建交叉口设计阶段,可以根据半径设计需求通过式(32)确定停止线的位置;
对于现有交叉口改造设计来说,当r为最小半径10m时,通过满足最小通过半径的式(33)可以得到停止线的极限位置
综上所述,只要获得了交叉口ΔL、w
其它步骤及参数与具体实施方式一至五之一相同。
采用以下实施例验证本发明的有益效果:
实施例一:
(1)左转路口导向线设计案例
为了说明所提出的左转路口导向线设计方法的实用性,本发明以长春市皓月大路-和 平大街交叉口和北安路-建设街交叉口为例,设计了左转路口导向线。交叉口的基本参数 如表2所示。
表2案例交叉口几何参数表(单位:m)
①皓月大路-和平大街
该交叉口渠化设计较为常规,上、下行进口道呈对称分布,交叉口内空间较为充足, 能够在现有渠化条件下施画左转路口导向线。
首先,求解冲突约束点P的坐标,由式(4)可得x
将圆曲线两端与进、口道的对向车行道分隔线顺接,即可施画出完整的左转路口导向 线。根据计算结果对皓月大路-和平大街交叉口施画的左转路口导向线实景航拍效果如图 8所示。
②建设街-北安路
该交叉口渠化设计较为特殊,由于建设街的流量不均衡特性,上、下行车道呈非对称 分布状态。
同样地,首先求解冲突约束点P的位置,由式(4)可得其坐标为(18.9,3.25)。根 据该交叉口L
16=L
因此,将左转路口导向线顺接出口道内侧车道不满足设计要求,需要考虑顺接出口道 内侧第二条车道。这时,转向结束点E的坐标变为(19.25,12)。由式(24)可得
有r<10,不满足最小半径需求。由于该交叉口出口道车道数量较多,有四条车道,可以继续考虑顺接出口道内侧第三条车道。经重新计算后,得到r值为12.7,满足最小半 径需求。则该交叉口左转路口导向线解析式为
根据计算结果对建设街-北安路交叉口施画的左转路口导向线实景航拍效果如图9所 示。
(2)左转停止线设计案例分析
选取了长春市东风大街-飞跃路交叉口进行分析,该交叉口各项几何参数测量值如表 1所示。
通过式(4)的计算可得,点P坐标为(14.6,3.5)。对于该交叉口,L
表1东风大街-飞跃路交叉口几何参数测量值
在交叉口左转半径满足极限值10m的条件下,由式(38)可得
这样,优化前后L
进而根据式(6)可以给出左转路口导向线解析式如式(39)所示。优化后的停止线位置和左转路口导向线设置如图10所示
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术 人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发 明所附的权利要求的保护范围。
- 一种左转路口导向线及左转停止线设计方法
- 一种左转路口导向线及左转停止线设计方法