飞机操纵面间隙动态测量方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及角位移间隙测量技术领域,具体涉及一种飞机操纵面间隙动态测量方法。
背景技术
飞机操纵面和主翼面之间由于制造公差、不正确的装配与使用磨损等都会产生间隙。操纵面间隙会导致飞机发生颤振、持续的极限环振荡等复杂颤振行为。为此,飞机设计过程中会设定飞机在整个服役期间的操纵面间隙检查限制值,并在飞机确定的间隙检查间隔内对操纵面(副翼、升降舵和方向舵等)的间隙进行定期测量和校准。
现有技术中,飞机操纵面间隙大多采用“静力加载法”进行测量和校准,即在操纵面某一固定位置处施加一定的静载荷,采用百分表等机械仪表测量操纵面上某参考点的垂向线性位移,进而换算为操纵面的偏转角度间隙值。测量过程中,近似角度/位移数值需要从刻度盘逐一读取,而无法利用采集仪表进行连续测量,测量位移范围和精度有限,因此百分表、象限仪等仪表仅适用于离散角位移的静态测量。
“静力加载法”测量操纵面间隙易受载荷的大小和力加载点的位置影响,载荷过小不容易克服操纵面铰链摩擦等因素,无法产生稳定的操纵面线性位移;载荷过大或者加载点位置选择不当则容易引入操纵面弹性变形,很难通过后续位移测量数据处理消除该不利影响,这为评定操纵面间隙是否符合设计要求和适航认证规定造成了困难。
发明内容
本发明的目的是提供一种飞机操纵面间隙动态测量方法,减少间隙测量对载荷施加位置和测量点的敏感性,便于外场工程实施。
为了达到上述目的,本发明提供一种飞机操纵面间隙动态测量方法,其特征在于,包括以下步骤:
向操纵面施加一个力矩M,使操纵面在间隙内持续偏转;
当操纵面偏转角α达到间隙上边界后,操纵面受到阻力停止偏转,测量操纵面偏转角达到间隙上边界的角度信号平均峰值α
向操纵面施加一个反向力矩-M,使操纵面反向偏转并回到间隙内,直至操纵面偏转角α达到间隙下边界,操纵面受到阻力停止偏转,测量操纵面偏转角达到间隙下边界的角度信号平均峰值α
计算间隙大小,所述间隙大小δ是偏转角度测量信号的上下平均峰值之差,其计算过程为:
δ=(α
进一步,本方法还包括以下步骤:
重复上述测量过程3次或以上,拟合上下边界以计算间隙大小δ,所述拟合过程为:
选取包含不少于5个振荡循环的操纵面动态响应信号,找出响应信号的所有极大值和极小值,然后聚类成上下两组,所有极大值点一组的算术平均值作为α
进一步的,本方法还包括以下步骤:
重复上述测量和拟合过程3次或以上,计算间隙测量值的平均值。
进一步的,本方法还包括以下步骤:
模拟飞控系统正常工作情况下,允许存在的相关系统失效/故障情况;
重复上述测量过程,获得系统失效/故障情况下的间隙测量值。
进一步的,本方法还包括测量前的准备步骤,包括:
确认飞机操纵面关联各系统完成地面机上功能试验,无影响操纵面的装配关系、质量、刚度特性的开口问题;
确认飞机上电,液压系统供压,飞控等系统工作正常,各操纵面作动正常;
设置并确保操纵面在测量期间处于中立位置。
进一步的,本方法还包括以下步骤:
在操纵面后缘安装角位传感器及夹具,所述角位传感器用以测量操纵面偏转角,所述夹具用以固定角位传感器,所述角位传感器连接有便携式动态信号采集仪。
进一步的,所述角位传感器安装在操纵面展向的中间位置,且在翼面弦向的半弦长之外。
进一步的,本方法还包括测量后的收尾步骤,包括:
关闭飞机液压系统,飞控系统和操纵面复位,飞机下电;
移除角位移传感器及夹具、推拉力计,断开数据采集仪。
本发明提供一种飞机操纵面间隙动态测量方法,通过施加正反向力矩使操纵面在间隙内偏转,从而测量偏转角度以计算间隙测量值,能够克服当前“静力加载法”测量的技术限制和缺陷,测量结果在一定程度上不依赖于操纵面加载位置和载荷的大小,能在飞机制造商、航空运营及维修单位处开展操纵面间隙的现场测量,有利于开展操纵面安装检查和后续间隙调整的维护工作。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,需要说明的是,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1是本发明实施例的飞机操纵面间隙动态测量方法的方法流程图;
图2是本发明实施例的操纵面测量位置示意图;
图3是本发明实施例的测量设备的安装示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在以下的描述中,涉及到“一些实施例”,其描述了所有可能实施例的子集,但是可以理解,“一些实施例”可以是所有可能实施例的相同子集或不同子集,并且可以在不冲突的情况下相互结合。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中所使用的术语只是为了描述本申请实施例的目的,不是旨在限制本申请。
本发明的目的在能够克服当前“静力加载法”测量的技术限制和缺陷,使测量结果在一定程度上不依赖于操纵面加载位置和载荷的大小,更有效的开展操纵面间隙是否符合设计要求和民用飞机适航认证规定的评估。
需要注意的是,本方法的操纵面间隙测量和标定应在飞机地面飞控系统正常工作状态开展。仅在操纵面作动器环节或操纵面结构安装环节开展的间隙测量只能反映该设备/结构件的局部间隙情况,不能表征操纵面的总体偏转角度间隙。
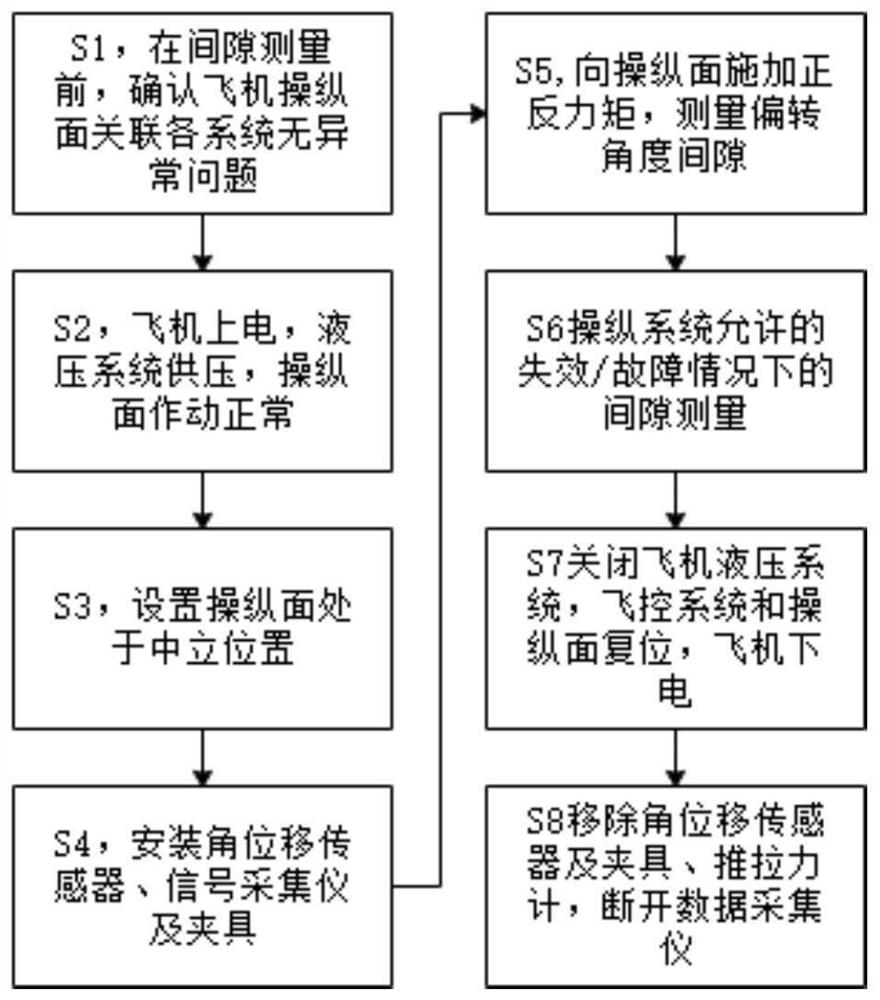
图1是本发明实施例的飞机操纵面间隙动态测量方法的方法流程图,本发明的飞机操纵面间隙动态测量方法包括以下步骤:
S1,在间隙测量前确认飞机主飞控系统、高升力系统、液压系统和航电系统等与操纵面作动和位置状态指示相关的系统完成了地面机上功能试验,无影响操纵面装配关系和质量、刚度特性的开口问题。
S2,飞机上电,液压系统供压,确认飞控系统等工作正常,各操纵面作动正常,无卡滞等异常。
S3,设置操纵面处于中立位置。同时,在间隙测量过程中不允许操纵驾驶舱内的驾驶杆/驾驶盘、脚蹬、襟缝翼手柄、扰流板手柄等操纵器件。
S4,安装角位移传感器及夹具。
其中,角位移传感器用以测量操纵面偏转角度响应信号,所述夹具用以固定角位传感器。
图2是本发明实施例的操纵面测量位置示意图。如图2所示,角位移传感器及夹具1安装于操纵面后缘。在一些实施例中,角位移传感器安装在操纵面展向的中间位置,且在翼面弦向的半弦长之外。在另一些实施例中,对于双作动器支持的操纵面,安装在两个作动器之间。
图3是本发明实施例的测量设备的安装示意图。如图3所示,角位移传感器1通过夹具固定在操纵面后缘上,角位移传感器1连接有便携式动态信号采集仪2,便携式动态信号采集仪2通过角位移传感器记录的偏转角度响应信号,计算显示设备3计算操纵面偏转间隙的校准值并将测量数据进行显示。
S5,采用推拉力矩向操纵面施加正反力矩,测量角度信号,计算操纵面间隙大小。
具体的,测量过程还包括以下步骤:
1)向操纵面施加一个力矩M,使操纵面在间隙内持续偏转。
2)当操纵面偏转角α达到间隙上边界后,操纵面受到阻力停止偏转,测量操纵面偏转角达到间隙上边界的角度信号平均峰值α
3)向操纵面施加一个反向力矩-M,使操纵面反向偏转并回到间隙内,直至操纵面偏转角α达到间隙下边界,操纵面受到阻力停止偏转,测量操纵面偏转角达到间隙下边界的角度信号平均峰值α
4)间隙大小δ是偏转角度测量信号的上下平均峰值之差,其计算过程为:
δ=(α
在本发明另一个实施例中,为提高测量精度,重复上述测量过程3次或以上,拟合上下边界以计算间隙大小δ,所述拟合过程为:
选取包含不少于5个振荡循环的操纵面动态响应信号,找出响应信号的所有极大值和极小值,然后聚类成上下两组,所有极大值点一组的算术平均值作为α
在此基础上,重复上述3次拟合过程,对3次拟合的间隙测量值进行平均计算,取其平均值。
S6,模拟飞控系统正常工作情况下,允许存在的相关系统失效/故障情况,重复上述测量过程,获得系统失效/故障情况下的间隙测量值。
例如:对于多作动器支持的操纵面,如果同一操纵面的作动器由多于一个液压系统供压的情况,也应选取典型的作动器失效(或者关联的液压系统失效)状态,单独开展操纵面间隙测量。
S7,关闭飞机液压系统,飞控系统和操纵面复位,飞机下电。
S8,移除角位移传感器及夹具、推拉力计,断开数据采集仪。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 飞机操纵面间隙动态测量方法
- 一种确定多操纵面飞机起飞着陆阶段各操纵面使用优先级的方法