一种溺水救援机器人
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及救援机器人技术领域,特别涉及一种溺水救援机器人。
背景技术
在救援机器人技术中,人们喜欢在节假日在海边或者湖边游玩,在出现落水事故时,如果没有及时救助,很可能发生意外。在发生落水事故时,救援者自己下水救援存在很大的安全隐患,救援者很容易因体力耗尽而发生危险,申请号:CN201721105531.2 公布了一种水中救援机器人,可以实施水上救援,但是无法进行空中投放和实时定位。
发明内容
针对上述技术问题本发明提供一种溺水救援机器人,包括动力叶轮机构、载体气囊机构、线缆通讯机构、上下悬挂机构、桥接支撑机构和飞翼平衡机构。
所述的动力叶轮机构包括:叶轮固定座和叶轮安装片;所述的载体气囊机构包括:叶轮机构基座和侧配重压块;所述的线缆通讯机构包括:马达安装板和立式安装板;所述的上下悬挂机构包括:连接吊体座和上部分吊具轴;所述的桥接支撑机构包括:上吊具轴板和顶端安装盖;所述的飞翼平衡机构包括:飞行器支撑梁和导线线缆;所述的叶轮固定座固定安装在叶轮机构基座上,叶轮安装片固定安装在马达安装板上,侧配重压块固定安装在叶轮机构基座上,马达安装板固定安装在通讯线管道上,立式安装板固定安装在顶盖板上,连接吊体座固定安装在立式安装板上,上部分吊具轴固定安装在上吊具轴板上,上吊具轴板固定安装在飞行器支撑梁上,顶端安装盖固定安装在飞行器支撑梁上,导线线缆固定安装在飞行器支撑梁上。
进一步的,动力叶轮机构还包括叶轮叶片、叶轮轴套、叶轮转轴、叶轮安装座、圆珠滚子轴承、铁基转子、铜线卷、转子转轴、顶端转轴和顶端轴盖,叶轮叶片转动安装在叶轮固定座上,叶轮轴套转动安装在叶轮固定座上,叶轮转轴固定安装在叶轮轴套上,叶轮安装座固定安装在叶轮安装片上,圆珠滚子轴承转动安装在叶轮安装座上,叶轮转轴转动安装在叶轮安装座上,铁基转子转动安装在叶轮转轴上,铜线卷转动安装在铁基转子上,转子转轴转动安装在铁基转子上,顶端转轴转动安装在转子转轴上,顶端轴盖固定安装在叶轮安装座上。
进一步的,载体气囊机构还包括救生气囊、滑动槽、紧固螺钉、转动齿轮、齿轮拨动条、侧部安装板、控制法兰板和充气控制器,所述的救生气囊固定安装在侧配重压块上,滑动槽固定安装在侧配重压块上,紧固螺钉固定安装在侧配重压块上,转动齿轮固定安装在侧配重压块上,齿轮拨动条固定安装在滑动槽上,侧部安装板固定安装在侧配重压块上,控制法兰板固定安装在侧部安装板上,充气控制器固定安装在控制法兰板上。
进一步的,线缆通讯机构还包括气囊安装板、通讯线管道、顶盖板、加强筋、通讯芯片、通讯显示器和模块安装柱,气囊安装板固定安装在顶盖板上,通讯线管道固定安装在气囊安装板上,顶盖板固定安装在气囊安装板上,加强筋固定安装在气囊安装板上,立式安装板固定安装在顶盖板上,通讯芯片固定安装在通讯显示器上,通讯显示器固定安装在模块安装柱上,模块安装柱固定安装在通讯线管道上。
进一步的,上下悬挂机构还包括通讯开合盖、通讯机盖板、吊体、下弯钩、上滑动勾、上弯钩、弯钩弹簧和弯钩安装条,通讯开合盖固定安装在通讯机盖板上,吊体固定安装在连接吊体座上,下弯钩固定安装在吊体上,上滑动勾固定安装在上弯钩上,上弯钩固定安装在弯钩安装条上,弯钩弹簧固定安装在弯钩安装条上,弯钩安装条固定安装在上部分吊具轴上。
进一步的,桥接支撑机构还包括吊具连接轴、安装连接法兰和拉力螺丝,吊具连接轴固定安装在安装连接法兰上,安装连接法兰固定安装在顶端安装盖上,拉力螺丝固定安装在顶端安装盖上。
进一步的,飞翼平衡机构还包括飞行翼固定座、中心轴、中心转子、转子外壳和两相飞行翼,飞行翼固定座固定安装在导线线缆上,中心轴固定安装在飞行翼固定座上,中心转子固定安装在中心轴上,转子外壳固定安装在飞行翼固定座上,两相飞行翼固定安装在中心转子上。
进一步的,连接吊体座固定安装在立式安装板上,上吊具轴板固定安装在飞行器支撑梁上,安装连接法兰固定安装在飞行器支撑梁上。
进一步的,转动齿轮和齿轮拨动条啮合。
本发明与现有技术相比的有益效果是。
1. 本发明的溺水救援机器人可以实现远程操控机器人和飞行器。
2. 本发明的溺水救援机器人可以实现高空定点投放。
3. 本发明的溺水救援机器人可以智能化展开救援作业,可以实施定位和控制,降低救援风险和救援难度,使救援过程更可靠。
附图说明
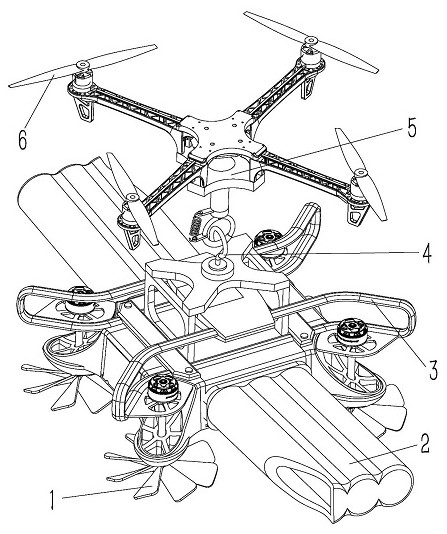
图1为发明在使用时的结构示意图。
图2为发明的动力叶轮机构结构爆炸图。
图3为发明的动力叶轮机构结构示意图。
图4为发明的载体气囊机构结构示意图。
图5为发明的线缆通讯机构结构示意图。
图6为发明的上下悬挂机构结构示意图。
图7为发明的桥接支撑机构结构示意图。
图8为发明的飞翼平衡机构结构爆炸图。
图9为发明的飞翼平衡机构结构示意图。
附图标号:1-动力叶轮机构;2-载体气囊机构;3-线缆通讯机构;4-上下悬挂机构;5-桥接支撑机构;6-飞翼平衡机构;101-叶轮叶片;102-叶轮固定座;103-叶轮轴套;104-叶轮转轴;105-叶轮安装片;106-叶轮安装座;107-圆珠滚子轴承;108-铁基转子;109-铜线卷;110-转子转轴;111-顶端转轴;112-顶端轴盖;201-救生气囊;202-叶轮机构基座;203-侧配重压块;204-滑动槽;205-紧固螺钉;206-转动齿轮;207-齿轮拨动条;208-侧部安装板;209-控制法兰板;210-充气控制器;301-气囊安装板;302-马达安装板;303-通讯线管道;304-顶盖板;305-加强筋;306-立式安装板;307-通讯芯片;308-通讯显示器;309-模块安装柱;401-通讯开合盖;402-通讯机盖板;403-连接吊体座;404-吊体;405-下弯钩;406-上滑动勾;407-上弯钩;408-弯钩弹簧;409-弯钩安装条;410-上部分吊具轴;501-上吊具轴板;502-吊具连接轴;503-安装连接法兰;504-拉力螺丝;505-顶端安装盖;601-飞行器支撑梁;602-导线线缆;603-飞行翼固定座;604-中心轴;605-中心转子;606-转子外壳;607-两相飞行翼。
具体实施方式
下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
实施例:如图1、图2、图3、图4、图5、图6、图7、图8和图9所示的一种溺水救援机器人,包括动力叶轮机构1、载体气囊机构2、线缆通讯机构3、上下悬挂机构4和桥接支撑机构5。
动力叶轮机构1包括:叶轮固定座102和叶轮安装片105;载体气囊机构2包括:叶轮机构基座202和侧配重压块203;线缆通讯机构3包括:马达安装板302和立式安装板306;上下悬挂机构4包括:连接吊体座403和上部分吊具轴410;桥接支撑机构5包括:上吊具轴板501和顶端安装盖505;飞翼平衡机构6包括:飞行器支撑梁601和导线线缆602;叶轮固定座102固定安装在叶轮机构基座202上,叶轮安装片105固定安装在马达安装板302上,侧配重压块203固定安装在叶轮机构基座202上,马达安装板302固定安装在通讯线管道303上,立式安装板306固定安装在顶盖板304上,连接吊体座403固定安装在立式安装板306上,上部分吊具轴410固定安装在上吊具轴板501上,上吊具轴板501固定安装在飞行器支撑梁601上,顶端安装盖505固定安装在飞行器支撑梁601上,导线线缆602固定安装在飞行器支撑梁601上。
动力叶轮机构1还包括叶轮叶片101、叶轮轴套103、叶轮转轴104、叶轮安装座106、圆珠滚子轴承107、铁基转子108、铜线卷109、转子转轴110、顶端转轴111和顶端轴盖112,叶轮叶片101转动安装在叶轮固定座102上,叶轮轴套103转动安装在叶轮固定座102上,叶轮转轴104固定安装在叶轮轴套103上,叶轮安装座106固定安装在叶轮安装片105上,圆珠滚子轴承107转动安装在叶轮安装座106上,叶轮转轴104转动安装在叶轮安装座106上,铁基转子108转动安装在叶轮转轴104上,铜线卷109转动安装在铁基转子108上,转子转轴110转动安装在铁基转子108上,顶端转轴111转动安装在转子转轴110上,顶端轴盖112固定安装在叶轮安装座106上, 圆珠滚子轴承107为不锈钢材质,可防水。
载体气囊机构2还包括救生气囊201、滑动槽204、紧固螺钉205、转动齿轮206、齿轮拨动条207、侧部安装板208、控制法兰板209和充气控制器210,所述的救生气囊201固定安装在侧配重压块203上,滑动槽204固定安装在侧配重压块203上,紧固螺钉205固定安装在侧配重压块203上,转动齿轮206固定安装在侧配重压块203上,齿轮拨动条207固定安装在滑动槽204上,侧部安装板208固定安装在侧配重压块203上,控制法兰板209固定安装在侧部安装板208上,充气控制器210固定安装在控制法兰板209上,救生气囊201为双重保护结构,填充气体为空气。
线缆通讯机构3还包括气囊安装板301、通讯线管道303、顶盖板304、加强筋305、通讯芯片307、通讯显示器308和模块安装柱309,气囊安装板301固定安装在顶盖板304上,通讯线管道303固定安装在气囊安装板301上,顶盖板304固定安装在气囊安装板301上,加强筋305固定安装在气囊安装板301上,立式安装板306固定安装在顶盖板304上,通讯芯片307固定安装在通讯显示器308上,通讯显示器308固定安装在模块安装柱309上,模块安装柱309固定安装在通讯线管道303上,通讯芯片307包含定位芯片和发射信号芯片。
上下悬挂机构4还包括通讯开合盖401、通讯机盖板402、吊体404、下弯钩405、上滑动勾406、上弯钩407、弯钩弹簧408和弯钩安装条409,通讯开合盖401固定安装在通讯机盖板402上,吊体404固定安装在连接吊体座403上,下弯钩405固定安装在吊体404上,上滑动勾406固定安装在上弯钩407上,上弯钩407固定安装在弯钩安装条409上,弯钩弹簧408固定安装在弯钩安装条409上,弯钩安装条409固定安装在上部分吊具轴410上,上部分吊具轴410为冷轧Q235B钢,可以承受较强的拉力。
桥接支撑机构5还包括吊具连接轴502、安装连接法兰503和拉力螺丝504,吊具连接轴502固定安装在安装连接法兰503上,安装连接法兰503固定安装在顶端安装盖505上,拉力螺丝504固定安装在顶端安装盖505上,顶端安装盖505为镁铝合金材质,高强度低重量。
飞翼平衡机构6还包括飞行翼固定座603、中心轴604、中心转子605、转子外壳606和两相飞行翼607,飞行翼固定座603固定安装在导线线缆602上,中心轴604固定安装在飞行翼固定座603上,中心转子605固定安装在中心轴604上,转子外壳606固定安装在飞行翼固定座603上,两相飞行翼607固定安装在中心转子605上,两相飞行翼607为钛铝合金材质,高硬度和韧性,不易损坏。
连接吊体座403固定安装在立式安装板306上,上吊具轴板501固定安装在飞行器支撑梁601上,安装连接法兰503固定安装在飞行器支撑梁601上,飞行器支撑梁601为碳纤维材质,高强度和低重量,为飞行减轻负重。
转动齿轮206和齿轮拨动条207啮合,转动齿轮206为不锈钢316材质,齿轮拨动条207为不锈钢316材质,在水中不易生锈。
- 一种溺水救援机器人
- 一种溺水救援机器人