一种三维测量表面温度场重建方法
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及计算机自动建模和温度测量领域,具体涉及结构光三维扫描和示温漆图像判读。
背景技术
在现代航空航天领域中,许多零部件,如发动机的叶片等,需要在高温下进行有效性和持久性测试,要进行热端部件的耐热性能测量。目前示温漆经常会被用来作为温度测量的媒介。示温漆是一种功能性涂料,在温度上升时其颜色发生变化,温度下降时颜色不变。在经过高温处理后,它在不同的峰值温度下会固定地呈现出稳定的颜色,即形成一种温度和颜色的对照关系。
在进行零部件温度测量时,接触式的温度测量是一种常用手段。其基本原理是使用具有感温元件的温度测量仪,充分接触被测对象,使两者发生热交换并最终达到热平衡。此时温度测量仪显示的温度值就是被测物体的温度。这类方法包括铂电阻测温法和热电偶测温法等。但是,这类方法由于会接触高温物体,可能给设备和人员带来一定的危险;并且由于是接触式的测量,每次只能测量出局部的很小区域的温度值,对于需要大面积测量的情况,这种方法的效率低。
基于示温漆的温度测量方法发展多年了,示温漆可大面积地涂于零部件的表面,可以得到被测元件表面最高温度场的连续分布情况。目前的示温漆温度测量方法可以分为人工判读和基于数字图像的判读两类。
人工判读的方法根据使用的示温漆型号,确定标准比色板。在待测零部件表面的示温漆高温显色稳定后,用笔勾勒出等温线位置,将零部件的颜色与标准比色卡的颜色进行比较,通过人的肉眼判断来确定示温漆所代表的温度。
然而,人工判读的方法存在很多的缺陷。首先,人工在识别色彩的时候,会存在很大的差异性,不能很准确的找出示温漆变色梯度最大的位置。这就造成对于同一被测元件,不同的人所绘制的等温线,甚至同一人多次绘制的等温线都会存在非常大的差异,这就导致等温线信息的准确性非常低。其次,人工判读对于熟练工的依赖性非常强,如果没有经验丰富的操作员,示温漆的判读会很困难,这对于示温漆应用的推广是十分不利的。另外,人工判读的效率相对较低,绘制等温线往往需要很长的时间,在实际应用中会降低工程整体效率。
基于数字图像的判读是伴随着计算机图像处理技术的发展而发展起来的,这种方法对喷涂了示温漆的零部件表面进行拍照,获得数字图像,在计算机上进行数字图像的颜色亮度值分析。同样根据示温漆烧制的标准比色板,提供了基于图像的示温漆温度自动判读方法。
然而,现有的数字图像判读方法,仅能够重建出基于图像平面范围的温度分布,不具有实际的空间分布特性。图像是经过透视投影映射到成像平面的数据,其中承载的颜色和温度对应关系无法反映出在被测零部件表面三维分布情况,没有坐标信息。
发明内容
发明所要解决的问题,人工示温漆温度判读方法中,人工判读精度不稳定,同一个人不同时刻目视测量的温度结果有差异,且这种方法对人工的经验要求高。而二维数字图像示温漆温度判读方法中,图像二维判读缺少空间分布信息的问题,不能在三维几何空间进行温度场描述。
针对现有技术的不足,本发明拟解决的技术问题是,提供结构光三维扫描方法重建三维模型,所述的三维模型具有颜色纹理,所述的颜色纹理使用示温漆图像判读技术能够提取出温度信息,所述的温度信息在三维模型上形成了表面温度场模型。
与现有技术相比,本发明设计了结构光三维扫描步骤对待测物体进行三维结构测量,获得数字化三维模型,同时结合示温漆图像判读技术可以从颜色纹理计算得到温度参数。本发明突破了人工温度测量和二维图像测量的局限,能够高效的获得三维温度场模型。其特征在于该方法的步骤如下:
(1)构建使用投影仪和工业相机组成的三维测量设备,所述设备进行三维表面模型重建,所述设备的硬件包含投影仪设备和成像相机;
(2)使用标定板,对相机的相对位置姿态和图像内参数进行标定,获得标定参数;所述的标定板是机器视觉领域的规则标定板,通过相机拍摄带有固定间距图案阵列平板、经过标定算法的计算,可以得出相机的几何模型,从而得到高精度的测量和重建结果。通过标定算法,可以计算相机的投影矩阵,并提供场景的三维测度信息。使用标定版标定的方法,需要对一个平面标定图案的至少两幅不同视图来进行标定。本案采用相机从不同角度和位置拍摄12张以上的标定板图像进行标定。
可选地,使用棋盘格标定板和实心原点标定板。
标定操作后获得的参数包括相机的主距、主点、畸变、相对位置和姿态转角参数。
(3)投影仪投射出一组序列化的编码结构光,照射到被测物体表面,被测物体表面由于结构光的照射,在不同的时刻和不同的位置,存在明暗交替的变化;
可选地,所述的序列化的编码结构光使用格雷码或相移码的编码方式,生成编码的模式图像。
所述的编码的模式图像,由投影仪投射出来,照射到物体表面。
(4)在投影仪投射出结构光的同时,相机进行拍照,记录下每一次明暗变化的物体的图像,得到一组序列化的数字图像;
所述的相机进行拍照,投影仪每次投射一张编码的模式图像,相机就拍照一张照片,投影仪投射和相机照射依次循环进行。
(5)根据结构光编码规则,对数字图像进行结构光解码,得到图像的像素的编码值;
(6)根据相机的标定参数和像素的编码值,建立三角测量空间关系,根据三角测量原理,计算图像像素对应的物理世界中的物体的三维坐标;
(7)在漫散射白光条件下,保持扫描设备与物体的位置关系不变,相机拍照,得到被测物体的颜色纹理照片;
所述的相机拍照得到被测物体的纹理照片,所述的纹理照片是反映被测物体的颜色的照片,所述的纹理照片是没有受到编码的模式图像影响的照片,纹理照片的颜色真实的反映了示温漆的颜色。
(8)相机拍照条件不变,再拍照一张示温漆标准样片比色板的照片;
所述的相机拍照条件是等同于步骤(7)所述的漫散射白光条件保持扫描设备与物体的位置关系;
所述的再拍照得到一张示温漆标准样片比色板的照片;所述的示温漆标准样片比色板的照片的颜色真实反映了示温漆标准样片比色板的颜色。
(9)将纹理照片的颜色值赋给三维重建的三维坐标,所述的颜色值赋给三维重建的三维坐标是得到三维坐标和颜色的一一对应;
(10)根据示温漆标准样片比色板的数字照片,提取每个不同温度值下的样片的颜色区间,求颜色区间的中值,与对应温度建立起颜色和温度对照表RGB-T,所述R表示彩色图像色彩参数中红色通道亮度值,G表示彩色图像色彩参数中绿色通道亮度值,B表示彩色图像色彩参数中蓝色通道亮度值,T表示与RGB颜色对应的温度值;
所述的示温漆标准样片比色板,它是由不同温度的示温漆样片组成的比色板;所述的不同温度的示温漆样片是将示温漆样片放在不同的高温加热条件下处理,得到的不同的颜色显像的样片。
所述的提取每个不同温度值下的样片的颜色区间,是在步骤(8)所述的图像上,找到每个温度的示温漆样片的像素区域;
所述的颜色区间的中值,是使用所有的同一示温漆样片的像素区域的颜色值求和再取平均得到的颜色值;
所述的颜色和温度对照表是颜色和温度的一一对应关系表。
(11)使用三维空间插值算法,对颜色和温度对照表进行加密;
所述的三维空间是由红绿蓝(RGB)三个颜色亮度值组成的三维特征空间;所述的插值是指在RGB三维空间中根据已有的示温漆样片的颜色的三维位置加密,生成百倍的以红绿蓝为参数的特征空间的三维位置,每个位置上有与颜色对应的温度值。
(12)在重建三维模型的温度场时,提取三维模型的每一个位置的颜色值,在颜色和温度对照表中,找到最邻近的颜色值,并且取出温度值,赋给对应的三维模型的位置;
所述的最邻近的颜色值是指在以红绿蓝为参数的特征空间的三维位置最临近的颜色;
得到三维模型温度场分布信息;
所述三维模型温度场为三维点云模型和三维网格模型,模型的顶点颜色和网格面片的颜色为步骤(7)所述的纹理颜色;
模型的顶点和网格面片还记录了温度参数。
(13)在三维温度场模型中,使用颜色聚类和边缘提取算法,获得等温线和温度分割效果;
所述颜色聚类方法,可选地,使用综合颜色空间和距离空间的相似性度量的K均值据类算法,得到区域分割结果;
所述边缘提取算法是将聚类后的区域的边缘提取,提取结果为等温线。
本发明提供一种三维测量表面温度场重建方法,可以轻便部署在被测物体周围,使用光学测量方法,非接触式获得物体的数字化三维模型。
附图说明
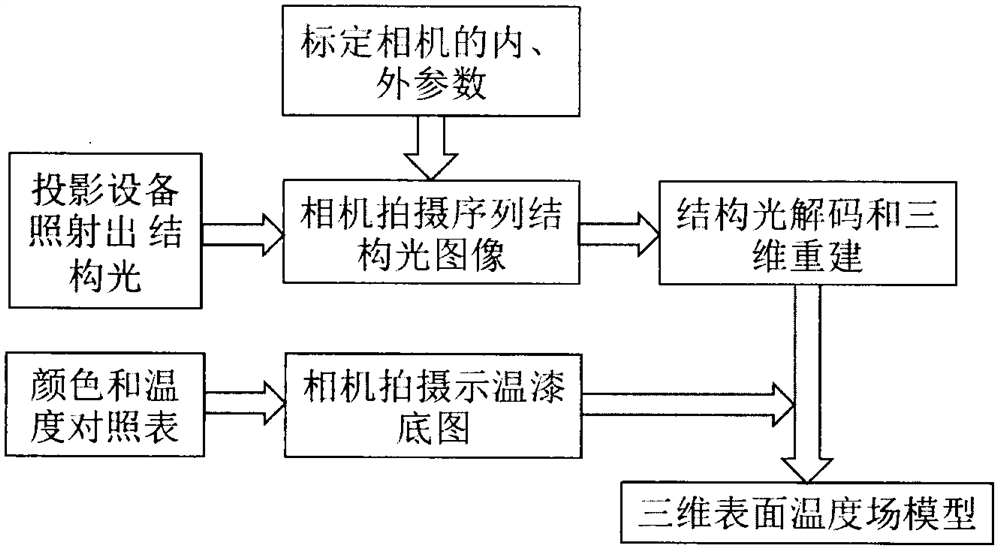
图1为本发明的方法流程图;
图2结构光扫描设备组成;
图3编码结构光;
图4以红绿蓝为参数的特征空间,每个位置上有与颜色对应的温度值;
图5三维温度自动判读示例。
具体实施方式
下面结合附图对本发明作更进一步的说明。参见图1,本发明公开了一种三维测量表面温度场重建方法,包括:
1.构建使用投影仪和工业相机组成的三维测量设备,所述设备进行三维表面模型重建,参见图2,所述设备的硬件包含投影仪设备和成像相机。
2.使用标定设备标定出相机的内、外参数,可选使用棋盘格标定板或者实心原点标定板;标定操作后获得的参数包括相机的主距、主点、畸变、相对位置和姿态转角参数;相机对标定板在不同位置、不同角度进行成像拍摄,每次检测棋盘格角点,采集10至20张标定板的图像数据,计算获取标定结果。一次标定结束后,在不改动相机结构的条件下,可以反复使用标定参数而不需要每次重新标定。
3.投影设备照射出结构光,照射到被测物体表面;所述结构光是一组在时间上序列化的编码的图案模式,序列化的图案模式的像素长宽不变,可选的像素尺寸为1024×768;可选地,所述的序列化的编码结构光使用格雷码或相移码的编码方式,生成编码的模式图像。格雷码是一个数列集合编码,每个数使用二进位来表示,假设使用n位元来表示每个数字,任两个数之间只有一个位元值不同。
结构光照射到被测物体表面后,被测物体表面在对应照射的不同时刻和不同的位置,存在明暗交替的变化,参见图3。
4.相机对被测物体表面拍照,拍摄得到序列化的结构光图像;记录下每一次明暗变化的物体的图像,得到一组序列化的被测物体的结构光图像;所述的相机进行拍照,投影仪每次投射一张编码的模式图像,相机就拍照一张照片,投影仪投射和相机照射依次循环进行。
5.对结构光图像进行结构光解码和三维重建;
根据结构光编码规则,对数字图像进行结构光解码,得到图像的像素的编码值;
根据相机的标定参数和像素的编码值,建立三角测量空间关系;根据三角测量原理,计算图像像素对应的物理世界中的物体的三维坐标。
结构光图像解码后,记码值相同的像素为匹配像素对;逐对计算每一对匹配像素对所对应的被测物体的三维点坐标。
6.根据标准样片比色板的颜色和温度参数,建立颜色和温度对照表;相机拍照得到一张示温漆标准样片比色板的照片;所述的示温漆标准样片比色板的照片的颜色真实反映了示温漆标准样片比色板的颜色。
根据示温漆标准样片比色板的数字照片,提取每个不同温度值下的样片的颜色区间,求颜色区间的中值,与对应温度建立起颜色和温度对照表RGB-T,所述R表示彩色图像色彩参数中红色通道亮度值,G表示彩色图像色彩参数中绿色通道亮度值,B表示彩色图像色彩参数中蓝色通道亮度值,T表示与RGB颜色对应的温度值;在由RGB三个颜色维度组成的三维空间中,形成了一个RGB-T图示,如图4所示。
所述的示温漆标准样片比色板,它是由不同温度的示温漆样片组成的比色板;所述的不同温度的示温漆样片是将示温漆样片放在不同的高温加热条件下处理,得到的不同的颜色显像的样片。
所述的提取每个不同温度值下的样片的颜色区间,是在步骤(8)所述的图像上,找到每个温度的示温漆样片的像素区域;
所述的颜色区间的中值,是使用所有的同一示温漆样片的像素区域的颜色值求和再取平均得到的颜色值;
所述的颜色和温度对照表是颜色和温度的一一对应关系表。
使用三维空间插值算法,对颜色和温度对照表进行加密;
所述的三维空间是由红绿蓝(RGB)三个颜色亮度值组成的三维特征空间;所述的插值是指在RGB三维空间中根据已有的示温漆样片的颜色的三维位置加密,生成百倍的以红绿蓝为参数的特征空间的三维位置,每个位置上有与颜色对应的温度值。
7.相机在没有结构光的条件下拍摄被测物体,拍摄出示温漆底图;在漫散射白光条件下,保持扫描设备与物体的位置关系不变,相机拍照,得到被测物体的颜色纹理照片,它是被测物体的示温漆底图图像;
所述的相机拍照得到被测物体的纹理照片,所述的纹理照片是反映被测物体的颜色的照片,所述的纹理照片是没有受到编码的模式图像影响的照片,纹理照片的颜色真实的反映了示温漆的颜色。
将纹理照片的颜色值赋给三维重建的三维坐标,所述的颜色值赋给三维重建的三维坐标是得到三维坐标和颜色的一一对应;
8.建立起三维表面重建的模型上的颜色和温度值一一对应关系,得到三维表面温度场模型。
在重建三维模型的温度场时,提取三维模型的每一个位置的颜色值,在颜色和温度对照表中,找到最邻近的颜色值,并且取出温度值,赋给对应的三维模型的位置;
所述的最邻近的颜色值是指在以红绿蓝为参数的特征空间的三维位置最临近的颜色;
得到三维模型温度场分布信息;
所述三维模型温度场为三维点云模型和三维网格模型,模型的顶点颜色和网格面片的颜色为步骤(7)所述的示温漆底图颜色;
模型的顶点和网格面片还记录了温度参数。
(13)如图5所示,系统可以通过算法计算模型的三维温度分布参数,在三维温度场模型中,使用颜色聚类和边缘提取算法,获得等温线和温度分割效果;
所述颜色聚类方法,可选地,使用综合颜色空间和距离空间的相似性度量的K均值据类算法,得到区域分割结果;
所述边缘提取算法是将聚类后的区域的边缘提取,提取结果为等温线。
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种三维测量表面温度场重建方法
- 一种双光场相机火焰三维温度场重建方法