一种电动滑板车
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及新能源技术领域,具体涉及一种电动滑板车。
背景技术
现在市场上的电动滑板车在实用性及科技性方面都无法让用户达到高的满意度值。例如,现在市面上的电动滑板车在设计的时候都只设计了车体踏板 (单个脚踏板),用户在骑行过程中只能采用传统滑板的双脚前后站立的方式,双脚不能左右平行站立,用户的体验感比较差。
发明内容
本发明实施例中提供一种电动滑板车,能够提高用户的体验感。
本发明提供一种电动滑板车,所述电动滑板车包括车体、车速控制模块以及前驱装置,其中:
所述车体包括车把手、空心连接杆、前车轮、后车轮、车体踏板、第一侧踏板、第二侧踏板、第一侧踏板伸缩装置、第二侧踏板伸缩装置以及车体踏板伸缩装置;
所述车把手通过所述空心连接杆与所述车体踏板连接,所述前车轮、所述后车轮分别设置在所述车体踏板的前端和后端;
所述第一侧踏板设置在所述车体踏板的一侧,所述第二侧踏板设置在所述车体踏板的另一侧,所述第一侧踏板可以通过所述第一踏板伸缩装置伸出或缩进所述车体踏板内部,所述第二侧踏板可以通过所述第二踏板伸缩装置伸出或缩进所述车体踏板内部;
所述车体踏板伸缩装置设置在所述车体踏板的内部,所述车体踏板伸缩装置用于调整所述车体踏板的高度;
所述车速控制模块设置在所述车把手以及所述空心连接杆中,所述前驱装置设置在所述前车轮上。
在一些实施例中,所述电动滑板车还包括充气阀门,所述充气阀门可以给所述第一踏板伸缩装置以及所述第二踏板伸缩装置充气,使得所述第一侧踏板以及所述第二侧踏板实现快速回缩;
所述充气阀门可以给所述车体踏板伸缩装置充气,使得车体踏板伸缩装置实现快速回缩。
在一些实施例中,所述车体踏板包括底部承重板、四个支撑脚、踏板顶板、踏板底板以及四个固定架。
在一些实施例中,所述支撑脚分别设置在所述踏板底板之上的所述承重板底部的四个角落,用于支撑所述承重板;
所述固定架分别设置在所述底部承重板上的四个角落,用于支撑所述踏板顶板。
在一些实施例中,所述支撑脚包括支撑杆、支撑板以及支撑抵掌,所述支撑板分别设置在所述承重板四个角落的底部,所述支撑杆为外螺纹杆,所述外螺纹杆旋入所述支撑板中的螺纹孔,构成有支撑力的杆柱;
所述支撑抵掌通过所述支撑抵掌中的内螺纹孔,与所述支撑杆连接。
在一些实施例中,所述支撑杆顶部设置有可调柄,构成所述车体踏板伸缩装置,通过旋转所述可调柄,可调整所述支撑杆的高度,从而调整所述踏板顶板的高度。
在一些实施例中,所述固定架包括固定底座以及踏板固定架,所述固定底座固定在所述承重板上,同时与所述踏板固定架连接,所述踏板固定架用于固定所述踏板顶板。
在一些实施例中,所述车速控制模块包括第一隔离放大器、第一DDS分频率单元、间隔测量单元、处理器、传统定速巡航单元、锁存器单元、走时计数单元、第二隔离放大器及第二DDS分频率单元,其中:
所述处理器分别与所述第一DDS分频率单元、所述走时计数单元、所述锁存器单元、所述传统定速巡航单元及所述间隔测量单元连通,所述第一隔离放大器、所述间隔测量单元、所述第二隔离放大器及所述第二DDS分频率单元依次连通,所述第一DDS分频率单元与所述第一隔离放大器连通,所述走时计数单元分别与所述第一隔离放大器、第二隔离放大器及所述锁存器单元连通;
所述第一隔离放大器接入高稳时钟源信号,所述第二DDS分频率单元接收车速信号。
在一些实施例中,述前驱装置包括行驶装置、中央处理器、磁刹装置、制动装置、电路协调部件以及电池,其中:
所述中央处理器与所述行驶装置、所述制动装置及所述电路协调部件连通,所述磁刹装置分别与所述制动装置及所述电池连通,所述电池还与所述电路协调部件连通。
在一些实施例中,所述磁刹装置包括车轴磁能刹车部件以及车轮磁能刹车部件。
相对于现有技术,本发明的有益效果是:本发明提供的电动滑板车除了设置有车体踏板,还设置有可伸缩的两个侧踏板,用户在行驶时,可以根据自身喜好或舒适度切换踏板,提高行驶的舒适度,此外,本发明提供的电动滑板车的车体踏板的高度也可以调节,用户可以根据自身的身高调整合适的车体踏板高度,进一步提高行驶的舒适度,此外,本实施例中的电动滑板车还设置有车速控制模块以及前驱装置,在实用新和科技性方面能让用户达到更高的满意度。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
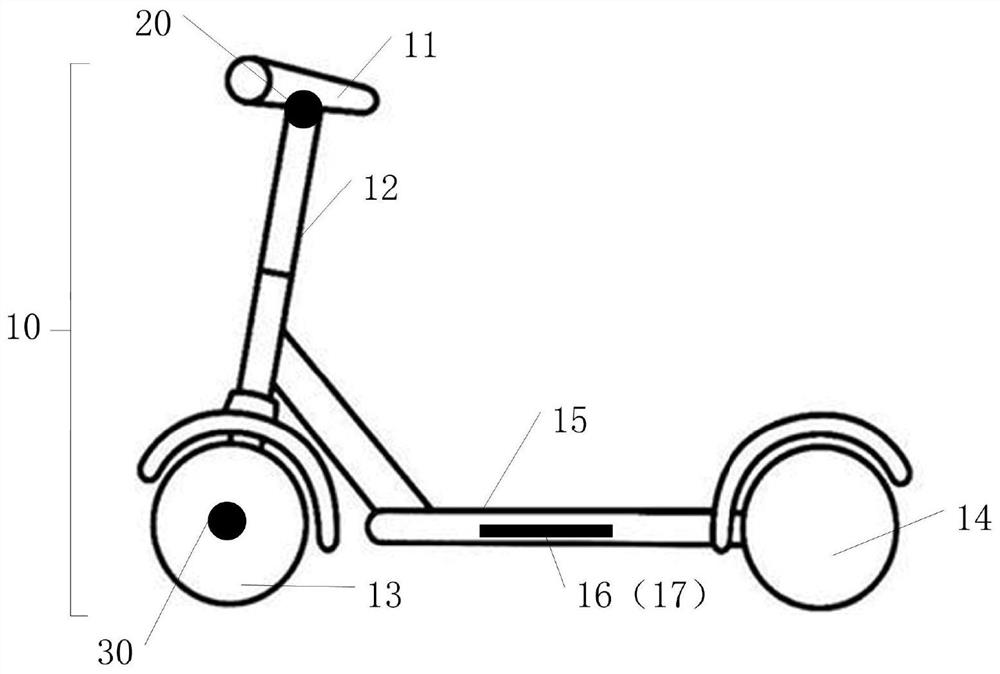
图1是本发明实施例提供的电动滑板车一个总体结构示意图;
图2是本发明实施例提供的车体踏板与侧踏板的方位示意图;
图3是本发明实施例提供的车体踏板内部的一个结构示意图;
图4是本发明实施例提供的支撑脚的一个结构示意图;
图5是本发明实施例提供的固定架的一个结构示意图;
图6是本发明实施例提供的固定架与踏板顶板的一个连接示意图;
图7是本发明实施例提供的充气阀门的一个平面结构示意图;
图8是本发明实施例提供的充气阀门的一个立体结构示意图;
图9是本发明实施例提供的充气阀门的一个俯视结构示意图;
图10是本发明实施例提供的车速控制模块的一个原理示意图;
图11是本发明实施例提供的车速控制模块的一个部分原理示意图;
图12是本发明实施例提供的车速控制模块的一个部分原理示意图;
图13是本发明实施例提供的车速控制模块的一个部分原理示意图;
图14是本发明实施例提供的前驱装置的一个实施例原理示意图;
图15是本发明实施例提供的车轴磁能刹车部件的一个安装示意图;
图16是本发明实施例提供的车轴磁能刹车部件的一个制动原理示意图;
图17是本发明实施例提供的车轮磁能刹车部件的一个制动原理示意图;
图18是本发明实施例提供的制动装置的一个具体连接示意图;
图19是本发明实施例提供的行驶装置的一个电路结构图。
具体实施例
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,“示例性”一词用来表示“用作例子、例证或说明”。本发明中被描述为“示例性”的任何实施例不一定被解释为比其它实施例更优选或更具优势。为了使本领域任何技术人员能够实现和使用本发明,给出了以下描述。在以下描述中,为了解释的目的而列出了细节。应当明白的是,本领域普通技术人员可以认识到,在不使用这些特定细节的情况下也可以实现本发明。在其它实例中,不会对公知的结构和过程进行详细阐述,以避免不必要的细节使本发明的描述变得晦涩。因此,本发明并非旨在限于所示的实施例,而是与符合本发明所公开的原理和特征的最广范围相一致。
本发明的实施例中,隔离放大器可采用西安同步电子科技有限公司的 SYN5002型号的放大器,DDS分频模块可采用ADI公司的AD9852型号的分频器,走时计数器可采用西安同步电子科技有限公司的SYN303型号的计数器,锁存器单元可采用TI公司的74HC573型号的锁存器,处理器可采用TI公司的MSP430型号的处理器。
本发明实施例提供一种电动滑板车,如图1所示,电动滑板车包括车体10、车速控制模块20以及前驱装置30。以下分别进行详细说明。
车体包括车把手11、空心连接杆12、前车轮13、后车轮14、车体踏板15、第一侧踏板16、第二侧踏板17、第一侧踏板伸缩装置(图1中未图示,见图3)、第二侧踏板伸缩装置(图1中未图示,见图3)以及车体踏板伸缩装置(图1中未图示,见图3);
车把手11通过空心连接杆12与车体踏板15连接,前车轮13、后车轮14分别设置在车体踏板15的前端和后端;
第一侧踏板16设置在所述车体踏板15的一侧(如左侧,此时第一侧踏板为左踏板),第二侧踏板17设置在车体踏板15的另一侧(如右侧,此时第一侧踏板为右踏板),第一侧踏板16可以通过第一踏板伸缩装置伸出或缩进车体踏板 15内部,第二侧踏板17可以通过第二踏板伸缩装置伸出或缩进车体踏板15内部;
车体踏板伸缩装置设置在车体踏板15的内部,车体踏板伸缩装置用于调整车体踏板15的高度;
车速控制模块20设置在车把手11以及空心连接杆12中,前驱装置30设置在前车轮13上。
其中,第一侧踏板、第二侧踏板以及车体踏板的相对位置如图2所示。
本实施例中,第一侧踏板及第二侧踏板,在不使用时使用伸缩功能藏于车体踏板区域内,用户在使用过程中,可以同时使用第一侧踏板、第二侧踏板来骑行;也可以单独选择第一侧踏板16和车体踏板15,或第二侧踏板17和车体踏板15来骑行。
如图3所示,电动滑板车还包括充气阀门40,充气阀门40可以给第一踏板伸缩装置18以及第二踏板伸缩装置19充气,使得第一侧踏板伸缩装置18以及第二踏板伸缩装置19实现快速回缩;
在一些实施例中,充气阀门40可以给车体踏板伸缩装置110充气,使得车体踏板伸缩装置带动车体踏板实现快速回缩。
其中,第一踏板伸缩装置18和第二踏板伸缩装置19均可由两个伸缩架组成。
车体踏板15包括底部承重板151、四个支撑脚152、踏板顶板153、踏板底板(未图示)以及四个固定架154。
其中,支撑脚152分别设置在踏板底板之上的承重板151底部的四个角落,用于支撑承重板151,并微调车体踏板15的水平高度;
固定架154分别设置在底部承重板151上的四个角落,用于支撑踏板顶板 153。
如图4所示,支撑脚152包括支撑杆1521、支撑板1522以及支撑抵掌1523,支撑板1522分别设置在承重板151四个角落的底部,延伸出一片支撑块,支撑块上钻有螺纹孔(即支撑板1522中的螺纹孔),支撑杆1522为外螺纹杆,外螺纹杆旋入支撑板1522中的螺纹孔,构成有支撑力的杆柱;
其中,支撑抵掌1523为圆片形支撑片,支撑抵掌1523通过支撑抵掌1523 中的内螺纹孔,与支撑杆1521连接,支撑杆1521、支撑板1522以及支撑抵掌1523 如此相互联系构成了支撑脚152。
其中,支撑杆顶部设置有可调柄1524,构成车体踏板伸缩装置,通过旋转可调柄1524,可调整支撑杆1521的高度,从而调整踏板顶板153的高度。用户在使用滑板车时,可以根据自身的舒适度调整滑板车车体踏板的高度,提高用户使用滑板车的舒适度。
下面对本发明中的固定架154进行介绍:
固定架154分别设置在底部承重板151上的四个角落,用于支撑踏板顶板 153。
分别设置在底部承重板151上的四个角落,用于支撑踏板顶板153。固定架 154的作用是固定踏板顶板153,通过四个方向的拉力,保证车体踏板15行使中不晃动,其详细设计如图5所示。
固定架154包括固定底座1541以及踏板固定架1542,固定底座1541固定在承重板151上,同时与踏板固定架1542连接,踏板固定架1542用于固定踏板顶板153。
其中,固定底座1541上设置有两个凸起,在两个凸起上设有两个孔15411 和孔15412;
固定架1542底部由“T”形圆筒构成,在“T”形圆筒两端分别设有内螺纹,通过内螺纹与螺栓,把螺栓通过孔15411和15412连接到内螺纹口,这样踏板固定架1542与固定底座1541紧密连接起来,并可以通过15411和15412孔的轴x,沿着轴运动。
所述固定底座1541上,设有一接合座15413,接合座1543中心位于轴x的垂直平分线上,踏板固定架1542的“T”形架置于接合座15413上,构成完整的固定架154;
踏板固定架1542在竖直方向是一个倒梯形,如图5所述,把竖直方向的杆称为固定杆15421,固定杆15421的作用是直接固定踏板顶板153。固定杆15421 的结构如图6所示:
固定杆15421顶端为“L”形,如图6所述,固定杆15421通过接合杆15422,与踏板顶板153外壁上的接合环1531连接,在固定杆15421端点设有一固定旋钮 15423,通过固定旋钮,可以调整接合杆的伸出长度,调整踏板顶板153固定的稳定程度。
其中,第一踏板伸缩装置18和第二踏板伸缩装置19均可由两个伸缩架组成,该伸缩架的原理与踏板固定架1542的原理类似,只不过上述固定杆15421 是固定的,而第一踏板伸缩装置18和第二踏板伸缩装置19的杆是伸缩式的,即可以向远离车体的一侧伸展或靠近车体的一侧回缩,从而完成两侧侧踏板的收放功能。在一些实施例中,侧踏板的其伸缩原理与传统公交车设备气压关门原理一致。
充气阀门40的介绍:
所述底部承重板151的上表面中间,设有一充气阀门40,通过充气阀门40,可以给侧踏板伸缩装置充气,同时充气阀门具有一个瞬间释放的功能,通过瞬间释放功能,直接让侧踏板在反推力的作用下实现快速回缩,装置简单,且易于实现同步,充气阀门的结构如图7所示:
如图7所示,喷射口41是圆筒形管道,是侧踏板伸缩装置(第一侧踏板伸缩装置18以及第二侧踏板伸缩装置19)的最底端接口,提供侧踏板(第一侧踏板16以及第二侧踏板17)所需反冲力;在喷射口41端点处设有一环形凹槽42,在阀门内部设有一固定销43,固定销43可卡入环形凹槽42,环形凹槽通过固定销,可以把喷射口41与充气阀门连接在一起,在喷射口41与充气阀44(充气口) 之间,设有一橡皮圈45,橡皮圈45起到防水防漏气作用;这样,充气口与喷射口41严密连接;由于固定销43可以水平移动,当固定销43向两侧离开,环形凹槽42不在受限制,侧踏板由于液压作脱离飞出。
充气阀门40的另一个结构示意图如图8所示,此图不含零部件,主要表述了充气阀门40的3个支撑柄,各支撑柄的作用是作为旋转轴心,提供各支撑杆旋转。如图9(此图为俯视图)所示,固定销分别绕着支撑柄一46和支撑柄二47可旋转,固定销两侧设有弹簧,阻止固定销脱离,当固定销脱离中心体48,那么就脱离与喷射口的连接;在支撑柄三49上,设有一菱形旋转体,初始状态,菱形旋转体的较短对角与固定销相连,固定销则紧扣中心体,在菱形旋转体上设有一控制柄410,若控制柄410旋转90°,则菱形旋转体旋转90°角度,旋转体较长对角与固定销43相连,固定销间距变大,固定销43脱离中心体48,由于没有固定销43作用力,侧踏板脱离充气阀。
车速控制模块20:
如图10所示,车速控制模块包括第一隔离放大器(隔离放大器1)、第一 DDS分频率单元(DDS分频率单元1)、间隔测量单元、处理器、传统定速巡航单元、锁存器单元、走时计数单元、第二隔离放大器(隔离放大器2)及第二 DDS分频率单元(DDS分频率单元2),其中:
处理器分别与第一DDS分频率单元、走时计数单元、锁存器单元、传统定速巡航单元及间隔测量单元连通,第一隔离放大器、间隔测量单元、第二隔离放大器及第二DDS分频率单元依次连通,第一DDS分频率单元与第一隔离放大器连通,走时计数单元分别与第一隔离放大器、第二隔离放大器及锁存器单元连通;
第一隔离放大器接入高稳时钟源信号,第二DDS分频率单元接收车速信号。
具体地,如图11所示,高稳时钟源信号f0经过隔离放大器1后被送至DDS 的外时钟输入端,作为DDS工作外部参考时钟,同时DDS的外部通讯端口连接至处理器,用以接受来自处理器的控制字命令及双向的数据传输。实际选用的DDS 芯片内部有2个48位频率控制寄存器(F0、F1),对于本装置高稳时钟源信号 f
其中,D为所需要计算的具体分频数值,f0为参考信号频率,本装置中f0 为10MHz,f为所需要分频的采样时间信号频率,对于f为1Hz(1秒)及0.1Hz (10秒)的情况,分频数值D应为2
如图12所示,车速信号fx经过隔离放大器3后分别送至两路DDS处理模块。当车速信号频率为上百兆甚至几百兆赫兹时,考虑到走时计数器对被测频率范围的限制,在本发明中设计其中一路DDS2模块对车速信号进行1/100分频处理。车速信号经隔离放大器3后直接送入DDS2的外部时钟输入端,作为DDS2工作时的参考时钟。DDS的外部通讯端口连接至处理器,处理器根据式(1)得到的2
另一路经过隔离放大器3的车速信号被送至DDS3的外部时钟输入端,作为 DDS3工作时的参考时钟。同时DDS3的外部通讯端口连接至处理器,处理器根据式(1)计算得到与DDS3通讯用的分频数值:
如图13所示,车速信号经过DDS分频单元2处理后得到的1MHz频率信号与 10MHz高稳时钟源信号信号分别送至间隔测量模块,具体的是送至相应时间处理芯片的STOP1与START引脚端。处理器依据高稳时钟源信号信号经DDS分频单元1处理后得到的采样时间信号T的上升沿使能间隔模块对STOP1与START两路频率信号进行相位测量,并将测量结果传送给处理器处理,根据精密时间间隔测量模块的最小分辨率测量范围来判断一组STOP1与START频率信号的上升沿是否达到最小的时间差,车速信号与高稳时钟源信号信号此时时间差Δt
前驱装置30:
如图14所示,前驱装置包括行驶装置、中央处理器、磁刹装置、制动装置、电路协调部件以及电池,其中:
中央处理器与行驶装置、制动装置及电路协调部件连通,磁刹装置分别与制动装置及电池连通,电池还与电路协调部件连通。
其中,磁刹装置包括车轴磁能刹车部件以及车轮磁能刹车部件。
本实施例中的电动滑板车的前驱装置使用磁刹,相比传统的碟刹,刹车更加缓和,避免由于急刹导致的危险,提高用户体验感。
具体地:
1.车轴磁能刹车部件
车轴磁能刹车部件是整个刹车系统的主要组成部分,行进中的电动滑板车主要靠这个部件进行制动,同时也主要通过该部件进行能量的转化与收集。示意图如图15所示:
在车轴上布满了“T型固定铁”,“T型固定铁”有一定的宽度,以此来增加线圈的面积。线圈固定在“T型固定铁”上,根据需要来决定线圈的匝数。“T型固定铁”将会带着线圈随车轮一起转动。所有的线圈最后会接入电路
如图16所示。钕铁硼高性能磁性材料在车轴附近提供了一个磁场,当车辆需要制动时,电路协调部件会自动连通线圈,固定在车轴上的线圈就会切割磁感线,根据法拉第电磁感应原理,在这个过程中会产生大量的电能,电路协调部件将此电能传到车辆中的电源储存起来。根据楞次定律,磁场会给车轴施加一个力阻止车轴的转动,从而达到车辆制动的目的。
2.车轮磁能刹车部件
车轮磁能刹车部件采用磁极转动,线圈固定的方式。如图17所示,线圈固定在底盘上靠近车轮的部分内,并且通过电路协调部件连接到总电源。滑板车未进行制动时,线圈与总电源之间处于断开状态。在车轮内部,固定有钕铁硼高性能磁性材料,随着车轮一起转动。当车辆制动时,线圈与这个电路协调部件相连通,由于磁极随着车轮一起在转动,通过线圈的磁通量是变化的,根据楞次定律和法拉第电磁感应原理,在这个过程中也会产生大量电能,同时达到制动效果。电路连接协调部件将电能储存在总电源中。
制动装置:
如图18所示,本实施例中中央处理器与车速传感器连通。中央处理器与所述制动装置通过控制回路连通,所述控制回路用于切换制动模式。制动装置与车轮连接。
具体地,轮速传感器,用于测量机车行驶时轮胎的转速;
中央处理器,用于对获得的车轮转速信息进行实时采集,获得车轮的角加速度值,处理后获得的数据输送至控制回路;
控制回路,用于实现机车制动装置的人、机切换;
制动装置:包含有电机、磁圈。实现机车制动的物理条件。
出厂时,中央处理器记录了初始的ABS参数信息,包括最大角减速度a1及最小恢复角速度a2。这些值也可以到后期通过判断车辆轮胎的磨损程度及行车路面具体情况,通过“阀值设置”修改中央处理器中的a1、a2。
当机车刹车情况时,中央处理器实时监测轮速传感器的车轮速度,计算后得到实时的车轮角加速度值a,因为此时是刹车情况,所以a的值为负值,称为角减速度,当a的值超过预设置的阀值a1时,说明车速减得过快,车轮有抱死趋势,中央处理器输送给控制回路,令其改为自动控制刹车方式,即由行车电脑来进行刹车,并控制物理的制动装置实现磁刹。
在上述过程中,有另一种可能情况,即当a值超过a1,行车电脑成功实现自动刹车后,某一时刻在a的值为正值,表明此时制动力过小,车轮有加速趋势,特别的当a值大于最小恢复角速度a2时,中央处理器使能控制回路改为人为刹车,以增加制动力。
行驶装置:
如图19所示,行驶装置包括蓄电池、电动机、导线电阻R1以及数控电阻R2,其中:所述蓄电池、所述电动机、所述导线电阻R1以及所述数控电阻R2依次连通,数控电阻R2与速控电阻R3连通,所述速控电阻R3用于改变所述数控电阻R2 的阻值。
具体地,蓄电池是提供电动车(电动滑板车)行驶所需的能量存储部件;电动机是将电能转换为动能的部件;导线电阻R1是不可避免的线路导线电阻;数控电阻R2用于直接控制电动车的电阻,但用户不能直接对它的阻值进行修改,而是通过用户控制“油门”(速控电阻R3),基于数字控制原理,经过数字运算过程,间接的改变数控电阻R2的阻值。
其中,该数字运算过程的数字运算方法如下:
数字运算的基本模型可以理解如下。系统输入模型为控速电阻R3,设符号Ri、阻值范围:(0,B)、单位Ω。也是用户端“油门”;系统输出模型为数字电阻R2,设符号Ro、阻值范围:(0,A)、单位Ω。也是用于电路中直接控制电动机功率的电阻;系统运算部件,应用广泛,技术成熟,在此不作介绍。
提出阻值运算公式1如下:
R
在如上公式中,Ro为数控电阻阻值、Ro`为上一加速时段数控电阻阻值、 Ri用户端速控电阻阻值、C每时段电阻改变值常量。通过数控系统,在每个加速时段T的初始时刻,计算出指定数控电阻Ro的阻值,然后在时间段T内,以Ro 所对应的功率进行加速。直到下一个时段T进行下一次循环,直到Ro接近于Ri,即电动车加速到指定速度。
根据公式1、功率计算公式P=UI和等效电流公式
式中,P工作电路的理论工作功率,U为蓄电池电压值,Ro`为上一加速时段电阻Ro阻值,C为加速过程段间阻值改变量参数,RL为线路等效电阻,RM 为电动机瞬时等效电阻。
工作流程
流程001:用户开始使用电动车,加油门,设Ri值为x;
流程002:此时,Ro`=A,根据计算,新一时段中:Ro=A+C(x-A),在时段T时间内,电动机以Ro对于的功率进行加速;
流程003:在下一时段T起始时刻,Ro`=A+C(x-A),根据计算,新一时段中:Ro`=A+C(x-A),在时段T时间内,电动机以新的Ro对于的功率进行加速;
流程004:经过了N次加速后,Ri≈Ro,即Ro接近于x,代表加速完成;
总结:全加速过程,把阻值分为了N段进行加速,每一段加速时间为T,最终达到均匀加速的目的。具体加速系统数学模型,可以经过实际实验,获得更完善的计算方法。
相对于现有技术,本发明的有益效果是:本发明提供的电动滑板车除了设置有车体踏板,还设置有可伸缩的两个侧踏板,用户在行驶时,可以根据自身喜好或舒适度切换踏板,提高行驶的舒适度,此外,本发明提供的电动滑板车的车体踏板的高度也可以调节,用户可以根据自身的身高调整合适的车体踏板高度,进一步提高行驶的舒适度,此外,本实施例中的电动滑板车还设置有车速控制模块以及前驱装置,在实用新和科技性方面能让用户达到更高的满意度。
以上对本发明实施例所提供的一种电动滑板车进行了详细介绍,本文中应用了具体个例对本发明的原理及实施例进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的技术人员,依据本发明的思想,在具体实施例及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
- 电动滑板车、电动滑板车的充电桩及电动滑板车充电系统
- 一种电动滑板车的控制方法及电动滑板车