一种新型隧道多功能组合式巡检机器人
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及机器人技术领域,具体涉及一种新型隧道多功能组合式巡检机器人。
背景技术
隧道智能巡检机器人是应用于地下隧道在线检测的智能化平台。机器人在隧道中自主运行,实现隧道电缆本体运行状态监测、电缆隧道内环境监测、电缆隧道内多传感器联动、电缆隧道安防等功能,综合提升对地下管线工作环境感知及工作状态评估能力,提升隧道管理的便捷性以及快速响应能力。
随着机器人行业的迅速发展,覆盖的行业面积越来越大,机器人的性能要求也越来越苛刻。面对市场需求不断增加的机器人行业,对机器人本身的工作效率就提出更高的要求,从机器人本身的角度来看,机器人需能够适应更多复杂的外界环境。为了更好的满足这种发展趋势,在类似地下隧道这样的现场工作环境,急需开发出结构简单易产、功能非常强大、高防护、且能适应复杂多变的现场需求环境的机器人平台。
发明内容
本发明提出的一种新型隧道多功能组合式巡检机器人,可解决上述技术问题,主要在地下隧道使用及其他类似工作环境的新型多功能组合式智能巡检机器人系统。
为实现上述目的,本发明采用了以下技术方案:
一种新型隧道多功能组合式巡检机器人,包括轨道、兼并垂直升降和水平转弯的轨道式行走底盘、多级传动的轻巧机械臂机构、行走箱体、云台、灭火弹装置、轨道式无线充电站、兼并爬升和转弯的轨道式自动对接连接器装置;
所述行走底盘固定于所述行走车箱,所述机械臂固定于所述行走车厢,所述云台固定于所述行走车厢,所述灭火弹装置固定于所述行走车厢,所述连接器装置固定于所述行走车厢,各个模块可以选择性的进行组合;
进一步的,所述轨道式行走底盘包括驱动轮,驱动轮连接法兰,驱动电机安装座,动力电机部件,电机安装座,上导向轮,下导向轮,驱动单元安装骨架,单臂旋转轴承,导向轮安装座,导向轮旋转连接轴,平面轴承,连接轴;
将驱动轮用螺钉固定于驱动轮连接法兰,紧固方式后续指螺钉紧固,动力电机部件固定于驱动电机安装座上,驱动电机安装座固定于电机安装座上,驱动轮连接法兰与动力电机部件的输出轴固定,用连接轴将整个电机安装座与驱动单元安装骨架连接在一起,使得两者可以相互转动,在两者之间加压簧使得驱动轮可以产生压力贴住轨道下沿产生摩擦力驱使这个底盘沿着轨道行驶;
将2组上导向轮、下导向轮组件固定于导向轮安装板上,再将此2组所述导向轮安装板固定于导向轮安装座上,在2个单臂旋转轴承和导向轮旋转连接轴和平面轴承与驱动单元安装骨架连接固定,安装2组上述导向轮安装座在驱动单元安装骨架上,整个底盘安装完成,把固定好的导向轮穿入轨道,通过驱动轮下面的压簧产生的压力驱动真个底盘行驶,驱动轮上面的齿轮与安装于轨道下面的柔性齿条啮合,从而可以让整个底盘在垂直方向进行升降运动,而导向轮安装座的与导向轮旋转连接轴之间装有单臂旋转轴承,两个导向轮安装座的活动旋转使得底盘可以进行水平方向转弯。
进一步的,所述机械臂机构使用一个驱动电机部件同步2级同步带和同步带轮的2:1的减速比,及方向相反旋转,即使用1个电机产生3个机械臂的联动,从而得到末端机械臂得到机器人挂载的云台进行巡检的位姿。
进一步的,将动力电机部件固定于驱动安装底座上,后续的固定方式都是用螺钉进行紧固,动力电机部件输出轴上安装同步轮六,将谐波减速机固定于驱动安装底座上,谐波减速机输入端安装同步轮五,电机输出同步轮六同步同步带二传动到谐波减速机输入端的同步轮五上,谐波减速机输出端固定机械臂底板三,将臂关节旋转轴承和固定连接轴三固定于机械臂底板三上,用机械臂底板二和同步轮一穿过固定连接轴三且进行固定,同理,用同步轮二、固定连接轴四、臂关节旋转轴承组装好固定于机械臂盖二二上,同时,继续把云台固定臂一、云台固定臂二、云台固定臂三一次固定于机械臂盖二二上,用同步带一将同步轮一和同步轮二传动连接起来,用张紧轮、张紧轮轴承、张紧轮轴进行同步带的张紧固定,然后将机械臂盖二一固定于机械臂底板二上,此时将固定连接轴二固定于机械臂底板二上,将臂连接板和臂连接板二依次固定于机械臂底板三上,将同轴固定法兰固定于驱动安装底座,用臂关节轴承二和机械臂底板一固定于固定连接轴二和同步轮法兰上,此时用臂关节旋转轴承和同步轮三固定于固定连接轴二上,将同步轮四固定于同步轮法兰上,再用同步带一将同步轮三和同步轮四传动连接起来,同理将张紧轮轴、张紧轮、张紧轮轴承对同步带一进行张紧固定,将光电触碰钣金固定于机械臂底板三上,将光电开关盖子固定于底座盖上,将机械臂盖一固定于机械臂底板一上,将机械臂盖三固定于机械臂底板三上,将转接板固定于驱动安装底座和底座盖上。
进一步的,所述轨道包括轨道本体和柔性齿条,同时轨道本体下方固定柔性齿条,用于将机器人的动力输出把机器人本体进行垂直方向上的升降行驶。
进一步的,所述行走箱体中包括了无线充电接收器、锂电池、控制电路及电气相关传感器。
进一步,所述云台中包括补光灯、红外传感器、可见光传感器,云台模块用于对现场的巡检和相关图像识别和感应。
进一步的,所述无线充电站包括充电桩钣金下盖,电源模块,电源模块安装板,充电桩钣金上盖,无线充电座安装件,隔离绝缘板,无线充电发射器,充电发射器固定板,散热风道塑料件;
将电源模块固定于电源模块安装板上,后续固定方式都为螺钉进行紧固,电源安装板固定于充电桩钣金上盖,将散热风道塑料件固定于充电桩钣金上盖,无线充电发射器固定板与无线充电发射器固定,然后再将所述无线充电发射器固定板固定于充电桩钣金上盖,将隔离绝缘板固定于充电桩钣金上盖,然后将所述充电桩钣金上盖与充电桩钣金下盖合并在一起,将无线充电座安装件固定于充电桩钣金下盖,无线充电座安装件可以固定在机器人行驶的轨道上,对机器人行走箱体中连接无线充电接收器进行无线充电,无线充电站里面既增加的散热风道,同时也做了防护设计,可在室外环境使用。
进一步的,所述连接器装置包括连接器装置带电发射端、连接器装置不带电接收端;
所述连接器装置带电发射端包括:扭簧轴承座,扭簧,扭簧轴,转向安装板,扭簧转向轴承,转向机构安装板,转向机构安装板固定板,连接板,接触金属固定盖,电磁铁,电磁铁塑料罩,充电触头,导向限位块,触碰开关;
将扭簧穿入扭簧轴内,将扭簧转向轴承穿入扭簧轴上,用扭簧轴承座固定于扭簧的另一受力边,固定方式都是用螺钉进行紧固,将扭簧轴承座固定在转向机构安装板固定板上,基于上述操作完成2个扭簧组件的装配,用转向安装板将扭簧安装于垂直和水平两个的方向,这样可以完成垂直和水平的摆动,且在扭簧变形作用下又可以自动恢复到初始位置,用连接板将所述扭簧组件和接触金属固定盖连接固定,将电磁铁固定于接触金属固定盖上,用电磁铁塑料罩与电磁铁固定,将充电触头固定于电磁铁塑料罩上,将导向限位块和触碰开关固定于接触金属固定盖上,将电磁铁、接触开关、充电触头通电,控制电磁铁的吸合及接触开关的感应信号智能的将电信号通过充电触头输入到连接器装置不带电接收端;
所述连接器装置带电接收端包括:扭簧轴承座,扭簧,扭簧轴,转向安装板,扭簧转向轴承,转向机构安装板,转向机构安装板固定板,连接板,接触金属固定盖二,吸铁,电磁铁塑料罩二,充电触头二,导向限位块二;
将扭簧穿入扭簧轴内,将扭簧转向轴承穿入扭簧轴上,用扭簧轴承座固定于扭簧的另一受力边,固定方式都是用螺钉进行紧固,将扭簧轴承座固定在转向机构安装板固定板上,基于上述操作完成2个扭簧组件的装配,用转向安装板将扭簧安装于垂直和水平两个的方向,这样可以完成垂直和水平的摆动,且在扭簧变形作用下又可以自动恢复到初始位置,用连接板将所述扭簧组件和接触金属固定盖二连接固定,将吸铁固定于接触金属固定盖二上,用电磁铁塑料罩二与吸铁固定,将充电触头二固定于电磁铁塑料罩二上,将导向限位块二固定于接触金属固定盖二上,吸铁被电磁铁吸附后、充电触头二被输入电信号,从而将接收到的电信号反馈到车厢体内,完成对接;
所述的连接器装置不带电接收端和所述的连接器装置带电发射端分别固定了2个行走车厢的一侧,让连接器装置外露于行走车厢。
进一步的,所述轨道上固定条形码,所述行走箱体外固定扫码传感器,实现机器人在轨道上的精确定位。
由上述技术方案可知,本发明的新型隧道多功能组合式巡检机器人,包括轨道、一种兼并垂直升降和水平转弯的轨道式行走底盘、一种多级传动的轻巧机械臂机构、行走箱体、云台、灭火弹装置、一种轨道式无线充电站、一种兼并爬升和转弯的轨道式自动对接连接器装置,目的在于综合提升对地下管线工作环境感知及工作状态评估能力,提升隧道管理的便捷性以及快速响应能力,为了能够灵活满足现场的工作需求,新型隧道多功能组合式巡检机器人的每个机构和装置进行模块化设计,根据需求进行选配,多功能兼并模块化设计是这种组合式巡检机器人的核心设计理念。
因此,本发明与现有技术相比,具有如下优点:
(1)本发明采用一种兼并垂直升降和水平转弯的轨道式行走底盘,通过条形码传感器进行定位,定位精度达到1mm,同时该行走底盘兼并垂直升降和水平转弯的能力,转弯半径小,能够适应空间复杂的现场,对机器人行驶的位置非常广,在3维空间中可以灵活运行,这个底盘对环境的适应性及非常高的;
(2)本发明采用一种多级传动的轻巧机械臂机构、首先机械臂使用1个驱动电机通过传动的方式驱动3个臂同是运动,可以达到末端手臂需要的位姿,成本上比传统的机械臂要低,控制上也更加简化,同时这个双向布局结构将里面的结构部分和走线紧凑规划出来,使得机械臂本身可以更轻,更小;
(3)本发明采用一种轨道式无线充电站,可以做到无接触充电,同时对防护和散热做到了高效的统一;
(4)本发明采用一种兼并爬升和转弯的轨道式自动对接连接器装置,这种连接器装置不仅能够在轨道上实现自动吸合与松开且有效的输出电信号,同时在轨道上能够兼并爬升和转弯,与上述的底盘功能可以匹配,这种功能能够对现场环境的需求的对接更加有针对性和高效性。
(5)本发明采用一种新型隧道多功能组合式巡检机器人,将各个模块进行针对性的组合,组合成满足各种现场需求的机器人产品,这是一种新型的结构简单易产、功能非常强大、且能适应复杂多变的现场需求环境的机器人平台。
附图说明
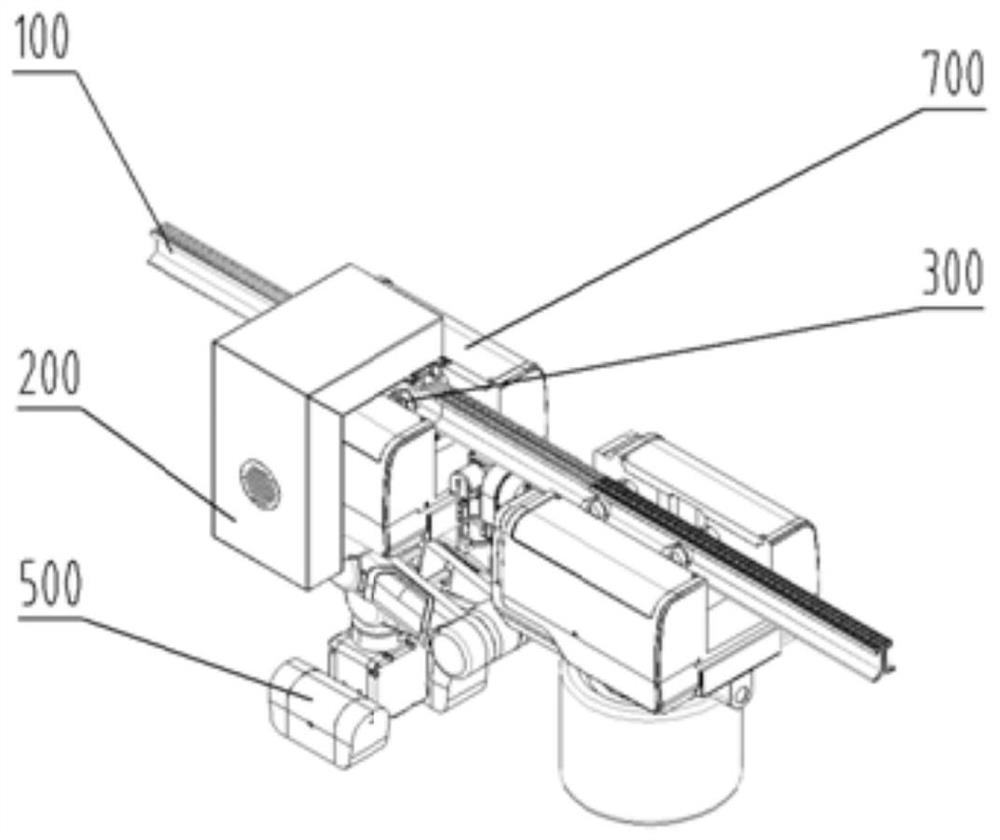
图1、图2是本发明的整体结构示意图;
图3、图4是本发明轨道式无线充电站示意图;
图5、图6是本发明的兼并垂直升降和水平转弯的轨道式行走底盘示意图;
图7、图8是本发明所述底盘爬升及精确定位功能示意图;
图9是本发明所述底盘转弯功能示意图;
图10是本发明的一种兼并爬升和转弯的轨道式自动对接连接器装置带电发射端示意图;
图11是本发明的一种兼并爬升和转弯的轨道式自动对接连接器装置不带电接收端示意图;
图12、图13是本发明的一种多级传动的轻巧机械臂机构示意图;
图14、图15是本发明的多级传动的轻巧机械臂机构整体示意图;
图16是本发明的是一种新型隧道多功能组合式巡检机器人的功能扩展使用和整体设计思路示意图。
其中,100为轨道;200为一种轨道式无线充电站;300为一种兼并垂直升降和水平转弯的轨道式行走底盘;400为一种多级传动的轻巧机械臂机构;500为云台;600为一种兼并爬升和转弯的轨道式自动对接连接器装置;700为行走机构箱体;800为灭火弹装置。
201为充电桩钣金下盖,202为电源模块,203为电源模块安装板,204为充电桩钣金上盖,205为无线充电座安装件,206为隔离绝缘板,207为无线充电发射器,208为充电发射器固定板,209为散热风道塑料件;
301为驱动轮,302为驱动轮连接法兰,303为驱动电机安装座,304为动力电机部件,305为电机安装座,306为上导向轮,307为下导向轮,308为驱动单元安装骨架,309为单臂旋转轴承,310为导向轮安装座,311为导向轮旋转连接轴,312为平面轴承,313为连接轴;
101为齿条,102为条形码张贴处,300为所述底盘,301为驱动轮;
601为扭簧轴承座,602为扭簧,603为扭簧轴,604为转向安装板,605为扭簧转向轴承,606为转向机构安装板,607为转向机构安装板固定板,608为连接板,609为接触金属固定盖,610为电磁铁,611为电磁铁塑料罩,612为充电触头,613为导向限位块,614为触碰开关;615为接触金属固定盖-2,616为吸铁,617为电磁铁塑料罩-2,618为充电触头-2,619为导向限位块-2;
401为转接板,402为底座塑料盖,403为机械臂盖1,404为机械臂底板1,405为机械臂底板2,406为机械臂盖2-1,407为机械臂盖2-2,408为云台固定臂-1,409为云台固定臂-2,410为云台固定臂-3,411为机械臂盖3,412为机械臂底板3,413为光电触碰钣金,414为光电开关盖子,415为底座盖,416为驱动安装底座,417为臂连接板,418为臂连接板-2,419为动力电机部件,420为谐波减速机,421为臂关节旋转轴承,422为固定连接轴-3,423为同步轮1,424为同步带1,425为张紧轮,426为张紧轮轴承,427为同步轮2,428为固定连接轴-4,429为固定连接轴-2,430为同步轮3,431张紧轮轴,432为同步轮4,433为同步轮法兰,434为臂关节轴承-2,435为同轴固定法兰,436为同步轮5,437为同步轮6,438为同步带2。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
本实施例所述的新型隧道多功能组合式巡检机器人,包括轨道、兼并垂直升降和水平转弯的轨道式行走底盘、多级传动的轻巧机械臂机构、行走箱体、云台、灭火弹装置、轨道式无线充电站、兼并爬升和转弯的轨道式自动对接连接器装置;
所述行走底盘固定于所述行走车箱,所述机械臂固定于所述行走车厢,所述云台固定于所述行走车厢,所述灭火弹装置固定于所述行走车厢,所述连接器装置固定于所述行走车厢,各个模块可以选择性的进行组合;即该结构通过轨道行走,轨道式无线充电站固定在轨道设定位置,通过兼并垂直升降和水平转弯的轨道式行走底盘穿入轨道,行走箱体固定在所述底盘下,多级传动的轻巧机械臂机构固定在行走箱体下,云台固定于所述机械臂下或固定于所述行走箱体下,灭火弹装置固定于行走箱体下,兼并爬升和转弯的轨道式自动对接连接器装置固定行走箱体后方,机器人可在行走箱体上对不同模块进行组合。
以下分别具体说明:
如图1和图2所示,包括轨道100、一种兼并垂直升降和水平转弯的轨道式行走底盘300、一种多级传动的轻巧机械臂机构400、行走箱体700、云台500、灭火弹装置800、一种轨道式无线充电站200、一种兼并爬升和转弯的轨道式自动对接连接器装置600;为了能够灵活满足现场的工作需求,新型隧道多功能组合式巡检机器人的每个机构和装置进行模块化设计,根据需求进行选配,多功能兼并模块化设计是这种组合式巡检机器人的核心设计理念。
其中:
轨道100包括:轨道100,柔性齿条101,轨道由型材模具拉出的铝合金材质,长度可按需求进行切割,轨道对接和安装处都有简便降本设计,方便施工,同时轨道下方可固定柔性齿条,用于将机器人的动力输出把机器人本体进行垂直方向上的升降行驶,参考示意图4。
所述轨道的形状可实现快速对接、安装和低成本生产。所述轨道与所述柔性齿条连接固定,提供给机器人动力完成垂直方向的运动。所述轨道上可以固定条形码,所述行走箱体外固定扫码传感器,实现机器人在轨道上的精确定位。
如图5、图6、图7、图8及图9所示,所述行走底盘300包括:驱动轮301,驱动轮连接法兰302,驱动电机安装座303,动力电机部件304,电机安装座305,上导向轮306,下导向轮307,驱动单元安装骨架308,单臂旋转轴承309,导向轮安装座310,导向轮旋转连接轴311,平面轴承312,连接轴313。原理说明参考图3、图4、图5。将驱动轮301用螺钉固定于驱动轮连接法兰302,紧固方式后续指螺钉紧固,动力电机部件304固定于驱动电机安装座303上,驱动电机安装座303固定于电机安装座305上,驱动轮连接法兰302与动力电机部件304的输出轴固定,用连接轴313将整个电机安装座305与驱动单元安装骨架308连接在一起,使得两者可以相互转动,在两者之间加压簧使得驱动轮可以产生压力贴住轨道下沿产生摩擦力驱使这个底盘沿着轨道行驶。将2组上导向轮306、下导向轮307组件固定于导向轮安装板上,再将此2组所述导向轮安装板固定于导向轮安装座310上,在2个单臂旋转轴承309和导向轮旋转连接轴311和平面轴承312与驱动单元安装骨架308连接固定,安装2组上述导向轮安装座310在驱动单元安装骨架308上,整个底盘安装完成,把固定好的导向轮穿入轨道,通过驱动轮301下面的压簧产生的压力驱动真个底盘行驶,驱动轮上面的齿轮与安装于轨道下面的柔性齿条啮合,从而可以让整个底盘在垂直方向进行升降运动,而导向轮安装座的与导向轮旋转连接轴之间装有单臂旋转轴承,两个导向轮安装座的活动旋转使得底盘可以进行水平方向转弯。
即所述上导向轮和所述下导向轮固定在导向轮安装件上,2组所述导向轮安装件固定在所述导向轮安装座上,所述导向轮安装座与所述导向轮旋转连接轴、所述平面轴承固定后能够实现稳定旋转,2组所述导向轮安装座通过上述安装方式固定在所述驱动单元安装骨架上,所述电机安装座与所述连接轴固定,压簧在所述电机安装座与所述驱动单元安装骨架之间。
如图12、图13、图14、图15所示,图14和图15分别表示的是所述机械臂的另外一个位姿转态的侧视图和正面视图;所述机械臂400包括:转接板401,底座塑料盖402,机械臂盖1403,机械臂底板1 404,机械臂底板2 405,机械臂盖2-1 406,机械臂盖2-2 407,云台固定臂-1 408,云台固定臂-2 409,云台固定臂-3 410,机械臂盖3 411,机械臂底板3 412,光电触碰钣金413,光电开关盖子414,底座盖415,驱动安装底座416,臂连接板417,臂连接板-2417,动力电机部件419,谐波减速机420,臂关节旋转轴承421,固定连接轴-3 422,同步轮1423,同步带1 424,张紧轮425,张紧轮轴承426,同步轮2 427,固定连接轴-4 428,固定连接轴-2 429,同步轮3 430,张紧轮轴431,同步轮4 432,同步轮法兰433,臂关节轴承-2 434,同轴固定法兰435,同步轮5 436,同步轮6 437,同步带2 438。该机械臂的原理是使用一个驱动电机部件同步2级同步带和同步带轮的2:1的减速比,及方向相反旋转,实现这一机构可以使用1个电机产生3个机械臂的联动,从而得到末端机械臂可以得到机器人可以挂载的云台进行巡检的位姿。将动力电机部件419固定于驱动安装底座416上,后续的固定方式都是用螺钉进行紧固,动力电机部件419输出轴上安装同步轮6 437,将谐波减速机420固定于驱动安装底座上416,谐波减速机420输入端安装同步轮5 436,电机输出同步轮6 437通过同步带2 438传动到谐波减速机420输入端的同步轮5 436上,谐波减速机420输出端固定机械臂底板3 412,将臂关节旋转轴承421和固定连接轴-3 422固定于机械臂底板3 412上,用机械臂底板2 405和同步轮1 423穿过固定连接轴-3 422且进行固定,同理,用同步轮2427、固定连接轴-4 428、臂关节旋转轴承组421装好固定于机械臂盖2-2407上,同时,继续把云台固定臂-1 408、云台固定臂-2 409、云台固定臂-3 410一次固定于机械臂盖2-2 407上,用同步带1 424将同步轮1 423和同步轮2 427传动连接起来,用张紧轮425、张紧轮轴承426、张紧轮轴431进行同步带的张紧固定,然后将机械臂盖2-1 406固定于机械臂底板2405上,此时将固定连接轴-2 429固定于机械臂底板2 405上,将臂连接板417和臂连接板-2418依次固定于机械臂底板3 412上,将同轴固定法兰435固定于驱动安装底座416,用臂关节轴承-2 434和机械臂底板1 404固定于固定连接轴-2 429和同步轮法兰433上,此时用臂关节旋转轴承421和同步轮3 430固定于固定连接轴-2 429上,将同步轮4 432固定于同步轮法兰433上,再用同步带1 424将同步轮3 430和同步轮4 432传动连接起来,同理将张紧轮轴431、张紧轮425、张紧轮轴承426对同步带1 424进行张紧固定,将光电触碰钣金413固定于机械臂底板3 412上,将光电开关盖子414固定于底座盖415上,将机械臂盖1 403固定于机械臂底板1 404上,将机械臂盖3 411固定于机械臂底板3 412上,将转接板401固定于驱动安装底座416和底座盖415上。
即所述多级传动的轻巧机械臂中所述同步轮4固定于所述同轴固定法兰,所述同步轮3固定于机械臂底板2上,通过同步带进行传动,所述同步轮1固定于机械臂底板1上,所述同步轮2固定于云台固定臂-1上,通过同步带进行传动,所述机械臂底板1与所述机械臂底板3通过所述臂连接板进行固定连接。
所述行走箱体700包括:行走箱体700。行走箱体如图1中700所示,行走箱体中包括了无线充电接收器、锂电池、控制电路及电气等相关传感器,此箱体模块可根据现场需求来增加或更换相关配置以灵活满足现场工作需要,箱体密封设计,防护等级高,适应性强。
所述云台500包括:云台500。云台具备防护等级高,有水平、竖直2个自由度,云台中包括补光灯、红外传感器、可见光传感器,云台模块用于对现场的巡检和相关图像识别和感应。
所述灭火弹装置800包括:灭火弹装置800。灭火弹装置从行走箱体进行控制,当发现火源时,灭火弹装置将开启,对现场环境进行智能灭火处理。
如图3、图4所示,所述无线充电站200包括:充电桩钣金下盖201,电源模块202,电源模块安装板203,充电桩钣金上盖204,无线充电座安装件205,隔离绝缘板206,无线充电发射器207,充电发射器固定板208,散热风道塑料件209。将电源模块202固定于电源模块安装板203上,后续固定方式都为螺钉进行紧固,电源模块安装板203固定于充电桩钣金上盖204,将散热风道塑料件209固定于充电桩钣金上盖204,充电发射器固定板208与无线充电发射器207固定,然后再将所述充电发射器固定板208固定于充电桩钣金上盖204,将隔离绝缘板206固定于充电桩钣金上盖204,然后将所述充电桩钣金上盖204与充电桩钣金下盖201合并在一起,将无线充电座安装件205固定于充电桩钣金下盖201,无线充电座安装件205可以固定在机器人行驶的轨道上,对机器人行走箱体700中连接无线充电接收器进行无线充电,无线充电站里面既增加的散热风道,同时也做了防护设计,可在室外环境使用。
即所述轨道式无线充电站由所述充电桩钣金下盖和所述充电桩钣金上盖组成外壳,通过所述无线充电座安装件固定在轨道上,所述隔离绝缘板固定在所述充电桩钣金下盖,所述无线充电发射器在所述隔离绝缘板上,所述散热风道塑料件固定在所述充电桩钣金上盖上散热风道,所述散热风道塑料件有斜孔进行防水和通气。
如图10、图11所示,所述连接器装置600包括:连接器装置带电发射端、连接器装置不带电接收端;所述连接器装置带电发射端包括:扭簧轴承座601,扭簧602,扭簧轴603,转向安装板604,扭簧转向轴承605,转向机构安装板606,转向机构安装板固定板607,连接板608,接触金属固定盖609,电磁铁610,电磁铁塑料罩611,充电触头612,导向限位块613,触碰开关614;将扭簧602穿入扭簧轴603内,将扭簧转向轴承605穿入扭簧轴603上,用扭簧轴承座601固定于扭簧602的另一受力边,固定方式都是用螺钉进行紧固,将扭簧轴承座601固定在转向机构安装板固定板607上,基于上述操作完成2个扭簧602组件的装配,用转向安装板604将扭簧602安装于垂直和水平两个的方向,这样可以完成垂直和水平的摆动,且在扭簧602变形作用下又可以自动恢复到初始位置,用连接板608将所述扭簧602组件和接触金属固定盖609连接固定,将电磁铁610固定于接触金属固定盖609上,用电磁铁塑料罩611与电磁铁610固定,将充电触头612固定于电磁铁塑料罩611上,将导向限位块613和触碰开关614固定于接触金属固定盖609上,将电磁铁610、触碰开关614、充电触头612通电,可以控制电磁铁610的吸合及触碰开关614的感应信号智能的将电信号通过充电触头612输入到连接器装置不带电接收端;所述连接器装置带电接收端包括:扭簧轴承座601,扭簧602,扭簧轴603,转向安装板604,扭簧转向轴承605,转向机构安装板606,转向机构安装板固定板607,连接板608,接触金属固定盖二615,吸铁616,电磁铁塑料罩二617,充电触头二618,导向限位块二619;将扭簧602穿入扭簧轴603内,将扭簧转向轴承605穿入扭簧轴603上,用扭簧轴承座601固定于扭簧602的另一受力边,固定方式都是用螺钉进行紧固,将扭簧轴承座601固定在转向机构安装板固定板607上,基于上述操作完成2个扭簧602组件的装配,用转向安装板604将扭簧602安装于垂直和水平两个的方向,这样可以完成垂直和水平的摆动,且在扭簧602变形作用下又可以自动恢复到初始位置,用连接板608将所述扭簧602组件和接触金属固定盖二615连接固定,将吸铁616固定于接触金属固定盖二615上,用电磁铁塑料罩二617与吸铁616固定,将充电触头二618固定于电磁铁塑料罩二617上,将导向限位块二619固定于接触金属固定盖二615上,吸铁616被电磁铁610吸附后、充电触头二618被输入电信号,从而将接收到的电信号反馈到行走车厢700体内,完成对接。所述的连接器装置不带电接收端和所述的连接器装置带电发射端分别固定了2个行走车厢700的一侧,让连接器装置外露于行走车厢700。通过上述功能可以在轨道上兼并爬升和转弯功能且自动完成对接与信号传输。
即所述兼并爬升和转弯的轨道式自动对接连接器装置,所述扭簧固定于所述扭簧轴上,所述扭簧轴固定于所述扭簧轴承座上,所述电磁铁与所述吸铁进行吸合,所述充电触头可进行电信号传输,所述电磁铁塑料罩安装所述触碰开关。
上述所述模块之间结合现场工作环境需求完成组合,行程针对性强、效率更高的组合化机器人,所述底盘固定于所述行走车箱,所述机械臂固定于所述行走车厢,所述云台固定于所述行走车厢,所述灭火弹装置固定于所述行走车厢,所述连接器装置固定于所述行走车厢,各个模块可以选择性的进行组合,可以灵活地配置运用了复杂多变的现场环境中,参考图16示意图所示。
图16说明了模块化设计后的模块分布,以及各个模块之间可能形成的组合产品,这个组合平台方式极大的扩展了机器人的使用功能,可以灵活的应对复杂的现场需求。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种新型隧道多功能组合式巡检机器人
- 一种电力隧道内多功能智能化巡检机器人