一种5G振子自动装夹装置
文献发布时间:2023-06-19 11:09:54
技术领域
本发明属于装夹装置技术领域,更具体地说,特别涉及一种5G振子自动装夹装置。
背景技术
天线振子是天线上的元器件,具有导向和放大电磁波的作用,使天线接收到的电磁信号更强。振子臂有的是杆状的形状,也有的结构较复杂,一般是很多个振子平行排列在天线上,其中,振子臂多为中空的柱棒形状。
如申请号为:CN201811086515.2的专利中,公开了一种移动通信基站天线振子,包括抱杆、导轨、天线本体、外罩、端盖、铰链、安装夹具、抱箍、螺栓、螺母、第一固定杆、第二固定杆、条形刷、连接杆、连接条、第一凹槽、第二凹槽、行走电机、齿轮、齿条、硅胶干燥剂包、拉杆、长条、导向孔、弹簧、导向杆、橡胶密封垫、通孔、条形块、第一条形槽和第二条形槽。本发明结构合理,通过端盖安装结构可便于两个端盖与天线本体的外罩顶部和底部进行安装与拆卸,在进行端盖的拆、装时,其无需通过外部工具进行螺丝的拧上和拧下,只需拉动拉杆以及转动拉杆,使条形块嵌合到第一条形槽中,使弹簧保持拉伸的状态,可使端盖压紧在外罩的两端。
振子臂在精加工时,需要使用夹具固定,由于振子臂为中空的柱棒形状,现有的振子臂夹具并不能很好的对振子臂进行固定,现有夹具在对振子臂固定时多通过两点固定,夹持点在振子臂的两侧,夹紧力量不容易调节,容易夹瘪振子臂造成材料的浪费,降低了产品生产的良品率,实用性不高。
于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种5G振子自动装夹装置,以期达到更具有更加实用价值性的目的。
发明内容
为了解决上述技术问题,本发明提供一种5G振子自动装夹装置,以解决现有振子臂夹具并不能很好的对振子臂进行固定,现有夹具在对振子臂固定时多通过两点固定,夹持点在振子臂的两侧,夹紧力量不容易调节,容易夹瘪振子臂造成材料的浪费,降低了产品生产的良品率,实用性不高的问题。
本发明5G振子自动装夹装置的目的与功效,由以下具体技术手段所达成:
一种5G振子自动装夹装置,包括固定底座,支撑柱,装夹支撑壳,夹紧旋柱,夹紧升降杆和夹紧联动杆;所述固定底座通过螺丝拧接固定在加工平台上;所述支撑柱焊接在固定底座顶面的两侧;所述装夹支撑壳通过底部插孔插接在支撑柱的外侧;所述夹紧旋柱插接在装夹支撑壳的壳体顶部;所述夹紧升降杆插接在装夹支撑壳中部横杆的内部;所述夹紧联动杆插接在装夹支撑壳中部横杆的底部。
进一步的,所述夹紧联动杆设有两个,且两个夹紧联动杆为对称设计,两个夹紧联动杆的底部均设有夹紧定位片,左侧夹紧定位片的形状为“I”形,且右侧夹紧定位片的形状为“U”形。
进一步的,所述夹紧升降杆的底部设有联动块,且联动块的两侧设有控制杆,控制杆的两端分别与联动块的侧面和夹紧联动杆的内侧转动连接。
进一步的,所述夹紧定位片的片体内侧为倾斜设计,且夹紧定位片和联动块的顶部为圆弧形倒角的设计。
进一步的,所述夹紧联动杆的顶部设有定位轨道块,且定位轨道块的截面形状为“T”形,装夹支撑壳中部横杆的内部设有定位轨道槽,且定位轨道块插接在定位轨道槽的内部。
进一步的,所述装夹支撑壳的顶部设有螺纹块,且螺纹块的内部设有螺纹孔,夹紧旋柱的柱体外部设有螺纹,且夹紧旋柱通过螺纹拧接在螺纹块的螺纹孔内。
进一步的,所述夹紧旋柱的内部设有弹簧槽,且弹簧槽的内部插接有适应顶簧,夹紧升降杆的杆体顶部设有挡环,且适应顶簧位于挡环的顶部。
进一步的,所述夹紧升降杆的顶部设有轨道滑杆,且夹紧旋柱的内部设有轨道滑槽,轨道滑杆插接在轨道滑槽。
与现有技术相比,本发明具有如下有益效果:
该装置在夹装振子臂时能够通过两个夹紧定位片和联动块的配合作用下对振子臂进行三点式夹固,保证了振子臂的稳定固定加工,且该装置在装夹振子臂时,在适应顶簧的作用下能够缓慢夹紧振子臂,从而使得夹紧力的调节行程边长,方便了在加工时对振子臂夹持力大小的调节,方便快捷,避免因夹持力道过大对振子臂造成损坏的现象发生,提高了振子臂生产加工的良品率,提高了该装置的实用性和灵活性。
首先,当转动夹紧旋柱时,夹紧旋柱柱体的螺纹能够在螺纹块的螺纹孔内上下移动,从而通过压缩适应顶簧带动夹紧升降杆上下移动,夹紧升降杆在向下移动时能够通过联动块两侧的控制杆拉动两个夹紧联动杆相向移动,从而通过底部的夹紧定位片将振子臂通过倾斜的断面将振子臂向上夹起,振子臂会随着两歌夹紧联动杆的继续移动而从夹紧定位片倾斜的断面上升,与下降的联动块配合作用下能够对振子臂实现三点夹固,能够稳定的对振子臂进行装夹,能够适应对不同型号外径的振子臂进行夹固,反之当夹紧升降杆上升时能够松开对振子臂的夹持固定,提高了该装置的稳定性和适应性。
其次,该装置在对振子臂装夹时,夹紧旋柱的作用力并不直接作用给夹紧升降杆,而是通过适应顶簧对夹紧升降杆施加作用力,从而通过适应顶簧的弹簧特性延长夹紧升降杆下降的过程,从而能够更加方便的调节该装置对振子臂夹持固定力度的大小,方便了在加工时对振子臂夹持力大小的调节,方便快捷,避免因夹持力道过大对振子臂造成损坏的现象发生,提高了振子臂生产加工的良品率,提高了该装置的实用性和灵活性。
再者,夹紧联动杆能够通过定位轨道块被定位轨道槽限制移动轨迹,从而使得夹紧联动杆在移动时不会出现歪斜、扭曲导致装置卡死失效的现象发生,夹紧升降杆能够通过轨道滑杆倍轨道滑槽固定升降轨迹,使得夹紧升降杆在升降时同样不会出现歪斜、扭曲导致装置失效的现象发生,使得该装置能够稳定的使用,提高了该装置的稳定性。
附图说明
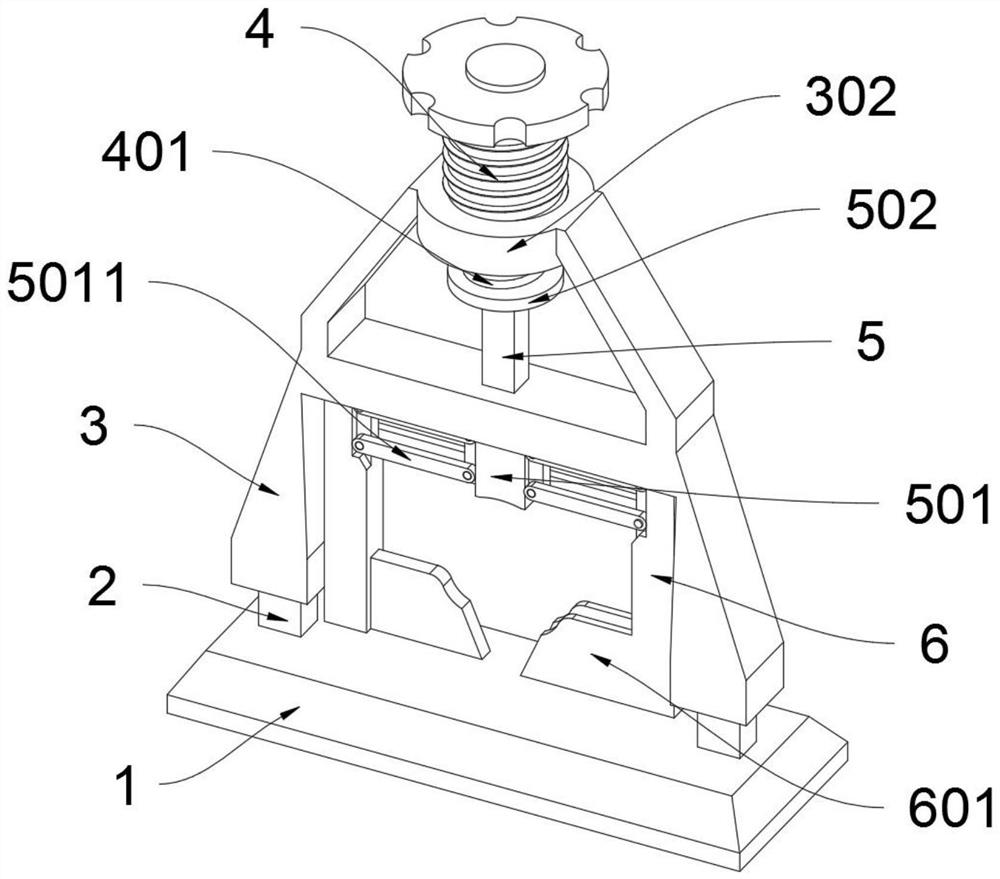
图1是本发明的结构示意图。
图2是本发明内部的结构示意图。
图3是本发明对振子臂进行装夹固定后的结构示意图。
图4是本发明夹紧联动杆的结构示意图。
图5是本发明夹紧升降杆的结构示意图。
图6是本发明夹紧旋柱的结构示意图。
图7是本发明装夹支撑壳的内部结构示意图。
图中,部件名称与附图编号的对应关系为:
1、固定底座;2、支撑柱;3、装夹支撑壳;4、夹紧旋柱;5、夹紧升降杆;6、夹紧联动杆;301、定位轨道槽;302、螺纹块;401、适应顶簧;402、轨道滑槽;501、联动块;502、挡环;503、轨道滑杆;5011、控制杆;601、夹紧定位片;602、定位轨道块。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
如附图1至附图7所示:
本发明提供一种5G振子自动装夹装置,包括固定底座1,支撑柱2,装夹支撑壳3,夹紧旋柱4,夹紧升降杆5和夹紧联动杆6;固定底座1通过螺丝拧接固定在加工平台上;支撑柱2焊接在固定底座1顶面的两侧;装夹支撑壳3通过底部插孔插接在支撑柱2的外侧;装夹支撑壳3的顶部设有螺纹块302,且螺纹块302的内部设有螺纹孔,夹紧旋柱4的柱体外部设有螺纹,且夹紧旋柱4通过螺纹拧接在螺纹块302的螺纹孔内,该设计使得当转动夹紧旋柱4时,夹紧旋柱4柱体的螺纹能够在螺纹块302的螺纹孔内上下移动;夹紧旋柱4插接在装夹支撑壳3的壳体顶部;夹紧升降杆5插接在装夹支撑壳3中部横杆的内部;夹紧升降杆5的顶部设有轨道滑杆503,且夹紧旋柱4的内部设有轨道滑槽402,轨道滑杆503插接在轨道滑槽402,该设计使得夹紧升降杆5能够通过轨道滑杆503倍轨道滑槽402固定升降轨迹,使得夹紧升降杆5在升降时不会出现歪斜、扭曲导致装置失效的现象发生,使得该装置能够稳定的使用,提高了该装置的稳定性;夹紧联动杆6插接在装夹支撑壳3中部横杆的底部;夹紧联动杆6的顶部设有定位轨道块602,且定位轨道块602的截面形状为“T”形,装夹支撑壳3中部横杆的内部设有定位轨道槽301,且定位轨道块602插接在定位轨道槽301的内部,该设计使得夹紧联动杆6能够通过定位轨道块602被定位轨道槽301限制移动轨迹,从而使得夹紧联动杆6在移动时不会出现歪斜、扭曲导致装置卡死失效的现象发生,使得该装置的能够稳定使用,提高了该装置的稳定性。
其中,夹紧联动杆6设有两个,且两个夹紧联动杆6为对称设计,两个夹紧联动杆6的底部均设有夹紧定位片601,左侧夹紧定位片601的形状为“I”形,且右侧夹紧定位片601的形状为“U”形,该设计使得当夹紧联动杆6在相向移动时,两个夹紧定位片601之间能够错位重合,从而能够将平台上的振子臂自动拾取夹持到装置的内部,提高了该装置的适应性。
其中,夹紧升降杆5的底部设有联动块501,且联动块501的两侧设有控制杆5011,控制杆5011的两端分别与联动块501的侧面和夹紧联动杆6的内侧转动连接,该设计使得当夹紧升降杆5上下移动时能够带动两个夹紧联动杆6同步移动,当夹紧升降杆5在向下移动时能够通过联动块501两侧的控制杆5011拉动两个夹紧联动杆6相向移动,从而通过底部的夹紧定位片601将振子臂通过倾斜的断面将振子臂向上夹起,振子臂会随着两歌夹紧联动杆6的继续移动而从夹紧定位片601倾斜的断面上升,与下降的联动块501配合作用下能够对振子臂实现三点夹固,能够稳定的对振子臂进行装夹,能够适应对不同型号外径的振子臂进行夹固,反之当夹紧升降杆5上升时能够松开对振子臂的夹持固定,提高了该装置的稳定性和适应性。
其中,夹紧定位片601的片体内侧为倾斜设计,且夹紧定位片601和联动块501的顶部为圆弧形倒角的设计,该设计使得当夹紧定位片601夹持平台上的振子臂时,能够通过夹紧定位片601片体倾斜的断面将振子臂自动拾取夹持到装置的内部,且夹紧定位片601和联动块501圆弧形倒角的设计保护了振子臂,避免振子臂在夹持固定时出现磕碰、损坏的现象发生,提高了该装置的适应性。
其中,夹紧旋柱4的内部设有弹簧槽,且弹簧槽的内部插接有适应顶簧401,夹紧升降杆5的杆体顶部设有挡环502,且适应顶簧401位于挡环502的顶部,使得该装置在对振子臂装夹时,夹紧旋柱4的作用力并不直接作用给夹紧升降杆5,而是通过适应顶簧401对夹紧升降杆5施加作用力,从而通过适应顶簧401的弹簧特性延长夹紧升降杆5下降的过程,从而能够更加方便的调节该装置对振子臂夹持固定力度的大小,方便了在加工时对振子臂夹持力大小的调节,方便快捷,避免因夹持力道过大对振子臂造成损坏的现象发生,提高了振子臂生产加工的良品率,提高了该装置的实用性和灵活性。
本实施例的具体使用方式与作用:
本发明中,通过拔出装夹支撑壳3,将该装置的装夹主体拔出,拾取工作平台上的振子臂,将两个夹紧联动杆6放置在振子臂的两端,通过旋转夹紧旋柱4能够完成对振子臂的自动拾取和装夹固定,当转动夹紧旋柱4时,夹紧旋柱4柱体的螺纹能够在螺纹块302的螺纹孔内上下移动,从而通过压缩适应顶簧401带动夹紧升降杆5上下移动,夹紧升降杆5能够通过轨道滑杆503倍轨道滑槽402固定升降轨迹,使得夹紧升降杆5在升降时同样不会出现歪斜、扭曲导致装置失效的现象发生,使得该装置能够稳定的使用,夹紧升降杆5在向下移动时能够通过联动块501两侧的控制杆5011拉动两个夹紧联动杆6相向移动,夹紧联动杆6能够通过定位轨道块602被定位轨道槽301限制移动轨迹,从而使得夹紧联动杆6在移动时不会出现歪斜、扭曲导致装置卡死失效的现象发生,当夹紧联动杆6在相向移动时,两个夹紧定位片601之间能够错位重合,从而能够将平台上的振子臂自动拾取夹持到装置的内部,夹紧联动杆6能够通过定位轨道块602被定位轨道槽301限制移动轨迹,从而使得夹紧联动杆6在移动时不会出现歪斜、扭曲导致装置卡死失效的现象发生,从而通过底部的夹紧定位片601将振子臂通过倾斜的断面将振子臂向上夹起,振子臂会随着两歌夹紧联动杆6的继续移动而从夹紧定位片601倾斜的断面上升,与下降的联动块501配合作用下能够对振子臂实现三点夹固,能够稳定的对振子臂进行装夹,能够适应对不同型号外径的振子臂进行夹固,反之当夹紧升降杆5上升时能够松开对振子臂的夹持固定,且该装置在对振子臂装夹时,夹紧旋柱4的作用力并不直接作用给夹紧升降杆5,而是通过适应顶簧401对夹紧升降杆5施加作用力,从而通过适应顶簧401的弹簧特性延长夹紧升降杆5下降的过程,从而能够更加方便的调节该装置对振子臂夹持固定力度的大小,方便了在加工时对振子臂夹持力大小的调节,方便快捷,避免因夹持力道过大对振子臂造成损坏的现象发生,提高了振子臂生产加工的良品率,该装置在夹装振子臂时能够通过两个夹紧定位片601和联动块501的配合作用下对振子臂进行三点式夹固,保证了振子臂的稳定固定加工,且该装置在装夹振子臂时,在适应顶簧401的作用下能够缓慢夹紧振子臂,从而使得夹紧力的调节行程边长,方便了在加工时对振子臂夹持力大小的调节,方便快捷,避免因夹持力道过大对振子臂造成损坏的现象发生,提高了振子臂生产加工的良品率。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
- 5G振子自动装夹装置以及5G振子
- 一种5G振子自动装夹装置