具有抑制图像旋转功能的三轴光电搜索跟踪装置及方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及光电侦察设备技术领域,尤其涉及一种具有抑制图像旋转功能的三轴光电搜索跟踪装置及方法。
背景技术
如红外搜索跟踪装置等的光电侦察设备,可对空域范围内的飞鸟、飞机、无人机、直升机、导弹等各种空中目标进行快速搜索,搜索到目标后进行跟踪,从而掌握区域内的空中目标情况。现有技术中光电侦察设备大多数是采用被动防御侦察以保护重点区域,侦察设备安装在保护区域范围内不可移动,具有较大的局限性,如车载光电侦察设备只能用于侦察,无法准确的跟踪目标以及上报目标坐标。
如红外搜索跟踪装置等在进行搜索时,通常是采用方位、俯仰两轴运动的方式,通过两轴陀螺测量系统移动载体(如车辆、轮船、飞机)方位和俯仰的摆动带来的扰动,即通过两轴陀螺仪分别测量移动载体在方位、俯仰摆动带来的扰动,因而系统移动载体方位、俯仰、横滚的摆动可以通过方位运动、俯仰运动以及目标的脱靶量进行消除,但是由于无法测量移动载体横滚轴摆动的扰动,移动载体横滚扰动无法获取,因而无法对横滚轴的扰动进行消除,或对于横滚摆动的消除非常有限,而在横滚方向上的扰动又较难以直接消除,导致搜索时获取的目标图片会发生旋转,进而使得目标探测精度低,同时由于图片旋转,还会使得目标识别、确认时易出错。
针对于移动载体横滚扰动的消除,目前通常是先通过移动载体的惯性系统测量移动载体横滚的扰动,然后通过软件对图片进行旋转的方式以进行部分消除,但该类方式由于不是直接测量探测探测轴系的扰动,需要将移动载体横滚扰动解算至探测轴系,会存在移动载体横滚扰动的解耦到探测轴系的问题,且消除方法的延时较大,导致图像较大幅度的旋转,致使全景图不连续,进而使得目标探测准确率急剧下降,因而该类方式仅适于对时延要求不高的系统,如搜索速度低于100°/S的低速搜索系统,对于更高搜索速度的系统则无法使用。
有从业者提出,针对移动搜索跟踪,通过在光电设备的底部与车辆安装处加上一个三轴稳台,由稳台矫正光电在车上的安装姿态,稳台通过安装惯导来采集动态车身姿态,实时对光电的姿态进行调整,使其始终保持在水平位置。但是由于整个光电设备的重量较重,三轴稳台需要克服较大的惯量来矫正姿态,在控制上会有较大的死区,因此在矫正的效果上会有不可预估时间的滞后延迟现象,不能及时消除车辆摇晃对光电的影响;并且按照稳台的实现成本会大大的提高,同时会大大增加系统的复杂程度,还会增加很多不可靠因素,使得系统可靠性降低。
发明内容
本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种结构简单、成本低、可靠性高的具有抑制图像旋转功能的三轴光电搜索跟踪装置及方法。
为解决上述技术问题,本发明提出的技术方案为:
一种具有抑制图像旋转功能的三轴光电搜索跟踪装置,包括光电传感器模块、旋转台、陀螺组件以及运动控制模块,所述光电传感器模块通过所述旋转台搭载在移动载体上以探测目标图像信息,所述运动控制模块控制所述旋转台在探测轴系上运动,通过所述陀螺组件测量移动载体的扰动,所述运动控制模块包括用于控制在俯仰轴系运动的俯仰组件、用于控制在方位轴系运动的方位组件以及用于控制在横滚轴系运动的横滚组件,所述陀螺组件为三轴陀螺组件,以用于测量移动载体在方位、俯仰、横滚轴系上的扰动。
进一步的,所述俯仰组件包括俯仰电机、俯仰位置传感器,所述方位组件包括方位电机、方位位置传感器,所述横滚组件包括横滚电机、横滚位置传感器。
进一步的,所述光电传感器模块包括红外热像仪11、激光测距仪12以及红外探测器、图像传感器中一种或多种的组合。
进一步的,所述移动载体中安装所述旋转台的位置处还设置有能够在横滚轴系运动的姿态矫正轴,以矫正所述旋转台在所述移动载体上的安装姿态。
进一步的,还包括分别与所述三轴陀螺组件、运动控制模块连接的主控模块,所述主控模块根据所述三轴陀螺组件测量到的移动载体在方位、俯仰、横滚轴系上的扰动进行耦合解算,计算出探测轴系上方位、俯仰、横滚的扰动,分别对应输出给所述俯仰组件、方位组件以及横滚组件以进行控制。
进一步的,还包括与所述主控模块连接的综合显示控制系统,用于接收目标探测信息进行数据处理、显示探测结果以及发送控制命令给所述主控模块。
一种利用上述三轴光电搜索跟踪装置的方法,步骤包括:
S1.通过所述三轴陀螺组件测量移动载体在方位、俯仰、横滚轴系上的姿态扰动;
S2.根据步骤S1测量到的所述姿态扰动进行解耦计算,得到所述旋转台在方位、俯仰、横滚轴系上所需的调整量;
S3.根据步骤S2计算出的调整量对应驱动所述俯仰组件、方位组件以及横滚组件运动。
进一步的,所述步骤S2的步骤包括:
S21.当移动载体运动时,移动载体的运动将通过移动载体的安装以及轴系的几何约束和摩擦约束向所述旋转台的台体耦合;
S22.获取由安装在轴系内的所述三轴陀螺组件对耦合到探测轴系测量得到的角速度,其中方位、俯仰、横滚轴系的角速度分别为ωfx、ωfy、ωfz;
S23.将步骤S22获取的角速度进行解耦计算,得到方位电机、俯仰电机、横滚电机的控制角速度分别为ωfx*secθf、ωfy、ωfz,其中θf为俯仰轴系OXfYfZf中坐标系绕OXa轴的转角;
S24.根据步骤S23解耦计算的结果,分别计算出方位电机、俯仰电机、横滚电机的控制量,并按照计算出的控制量控制各电机以消除移动载体在方位、俯仰、横滚轴系上产生的扰动。
进一步的,还包括目标搜索跟踪控制方法,步骤包括:根据光电传感器模块探测到的图像进行目标检测跟踪,当检测到目标时,通过对比同一角度位置的前后帧图像,判断目标是否发生移动,以实现移动目标的检测。
进一步的,还包括四轴稳像控制步骤,步骤包括:获取移动载体的横滚姿态以及通过所述三轴陀螺组件测量所述旋转台的姿态,闭环控制姿态矫正轴实时矫正所述旋转台的安装姿态,使得保持所述旋转台的视轴始终保持在水平位置,以形成四轴稳像。
与现有技术相比,本发明的优点在于:
1、本发明采用方位、俯仰、横滚三轴三框架结构,可以同时实现方位、俯仰、横滚三轴运动,由三轴陀螺组件直接测量移动载体方位、俯仰、横滚的扰动,经过解耦计算后不仅可以消除移动载体在方位、俯仰轴系上的扰动,还可以消除横滚轴系上的扰动,从而可以抑制图像旋转,进而提高目标探测精度,解决传统通过软件消除图像旋转延时大、消除效果不理想以及跟踪精度差等问题。
2、本发明中光电传感器模块除了在水平俯仰运动以外,还可以进行横滚的三轴运动,从而能够有效的补偿移动载体在行驶时产生的颠簸和横滚运动。
3、本发明进一步通过在移动载体上设置一个可以横滚的姿态矫正轴,与三轴框架共同形成四轴框架,不仅可以消除移动载体方位、俯仰、横滚的扰动,还可以矫正旋转台在移动载体上的安装姿态,消除移动载体本身的倾斜姿态,提高旋转台在安装时受到移动载体姿态影响的精度,进一步提高目标的探测精度。
附图说明
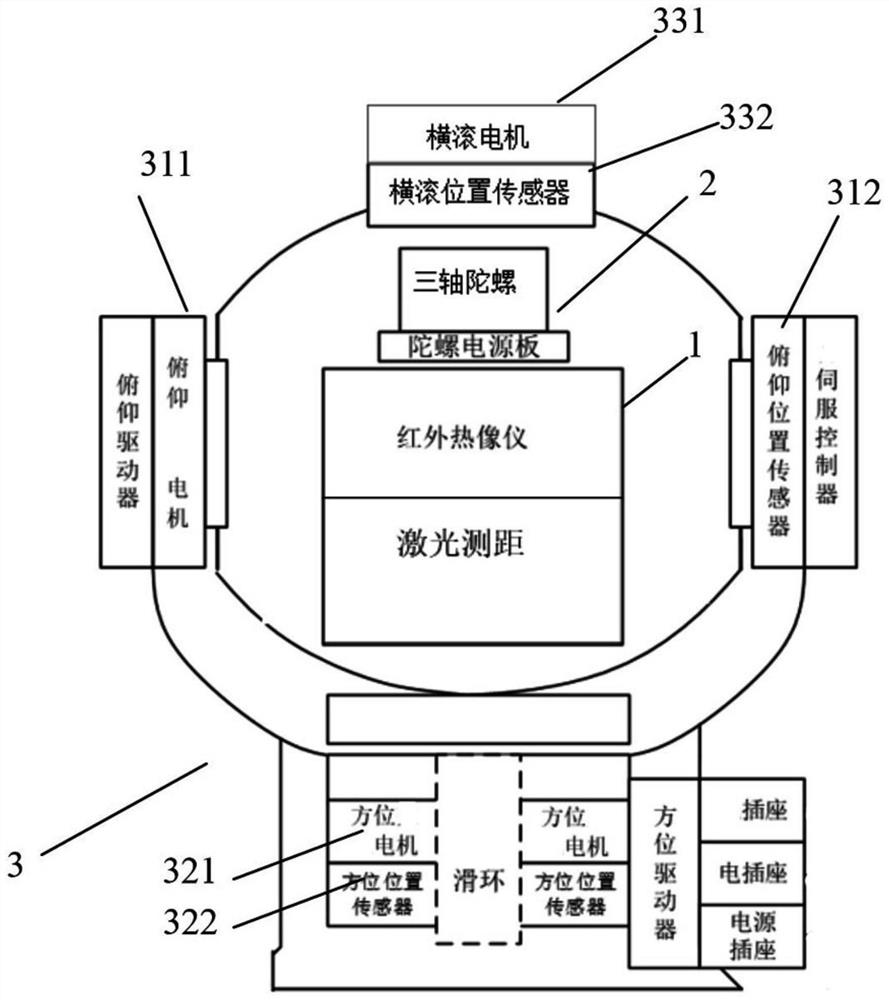
图1是本实施例三轴光电搜索跟踪装置的结构原理示意图。
图2是本发明具体应用实施例中三轴光电搜索跟踪装置的结构原理示意图。
图3是本实施例中横滚稳定控制回路消除原理示意图。
图4是本实施例中实现稳定控制的坐标系架构原理示意图。
图5是本实施例中实现目标搜索的流程示意图。
图6是本实施例中目标搜索的控制流程示意图。
图7是本实施例中目标跟踪控制流程示意图。
图8是本实施例中四轴稳像控制流程示意图。
图例说明:1、光电传感器模块;2、三轴陀螺组件;3、运动控制模块;31、俯仰组件;311、俯仰电机;312、俯仰位置传感器;32、方位组件;321、方位电机;322、方位位置传感器;33、横滚组件;331、横滚电机;332、横滚位置传感器。
具体实施方式
以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
如图1所示,本实施例具有抑制图像旋转功能的三轴光电搜索跟踪装置包括光电传感器模块1、旋转台、陀螺组件以及运动控制模块3,光电传感器模块1通过旋转台搭载在移动载体上以探测目标图像信息,运动控制模块3控制旋转台在探测轴系上运动,通过陀螺组件测量移动载体的扰动,运动控制模块3包括用于控制在俯仰轴系运动的俯仰组件31、用于控制在方位轴系运动的方位组件32以及用于控制在横滚轴系运动的横滚组件33,陀螺组件为三轴陀螺组件2,以用于测量移动载体在方位、俯仰、横滚轴系上的扰动。
本实施例采用方位、俯仰、横滚三轴三框架结构,通过同时设置俯仰组件31、方位组件32以及横滚组件33,使得光电传感器模块1可以实现方位、俯仰、横滚三轴运动,由三轴陀螺组件2直接测量移动载体方位、俯仰、横滚的扰动,经过解耦计算后不仅可以消除移动载体在方位、俯仰轴系上的扰动,还可以消除横滚轴系上的扰动,从而可以抑制图像旋转,进而提高目标探测精度,解决传统通过软件消除图像旋转延时大、消除效果不理想以及跟踪精度差等问题。
本实施例具体在俯仰轴的后侧设置一个横滚轴,使得俯仰的光电传感器模块1除了在水平俯仰运动以外,还可以进行横滚的三轴运动,从而能够有效的补偿移动载体在行驶时产生的颠簸和横滚运动。
本实施例中,俯仰组件31具体包括俯仰电机311、俯仰位置传感器312,以实现俯仰运动,还包括用于驱动的俯仰驱动器等;方位组件32包括方位电机321、方位位置传感器322,以实现方位运动,还包括用于驱动的方位驱动器等;横滚组件33包括横滚电机331、横滚位置传感器332,以实现横滚运动,具体在俯仰轴的后方设置横滚电机331以调整光电搜索跟踪装置的倾斜角。
上述三轴陀螺组件2具体可采用三轴陀螺仪,或使用一个两轴陀螺仪和一个单轴陀螺仪的组合,或直接使用三个单轴陀螺仪进行测量。陀螺仪具体可以采用光纤陀螺、微机械陀螺、mems陀螺、惯导组合、激光陀螺等类似测量惯性坐标系的传感元件。陀螺仪或惯性测量器件可安装在探测轴系内,也可安装在某一轴系,或者直接安装在移动载体上。
本实施例中,光电传感器模块1包括红外热像仪、激光测距仪,还可以采用红外探测器、图像传感器,或其他可见光的光电传感器以适用于其他可见光、紫外、近红外等的搜索跟踪装置中,具体可根据实际需求配置。
本实施例中,移动载体中安装旋转台的位置处还设置有能够在横滚轴系运动的姿态矫正轴,以矫正旋转台在移动载体上的安装姿态。由于光电搜索跟踪装置工作时,探测的目标是在空间坐标系中,通过探测的目标距离和光电的视轴角度来计算目标在空间中的坐标位置,其中视轴角度非常容易受到安装精度的影响,因而光电搜索跟踪装置在移动载体上的安装精度会直接影响目标探测精度。本实施例通过在移动载体上设置一个可以横滚的姿态矫正轴,与上述三轴框架共同形成四轴框架,不仅可以消除移动载体方位、俯仰、横滚的扰动,还可以矫正旋转台在移动载体上的安装姿态,消除移动载体本身的倾斜姿态,提高旋转台在安装时受到移动载体姿态影响的精度,进一步提高目标的探测精度。
本实施例中,还包括分别与三轴陀螺组件2、运动控制模块3连接的主控模块,主控模块根据三轴陀螺组件2测量到的移动载体在方位、俯仰、横滚轴系上的扰动进行耦合解算(解耦计算),计算出探测轴系上方位、俯仰、横滚的扰动,分别对应输出给俯仰组件31、方位组件32以及横滚组件33以进行控制。
在具体应用实施例中,通过三轴陀螺组件2测量的移动载体方位、俯仰、横滚的扰动进行耦合解算,计算出移动载体扰动在探测轴系的俯仰、方位、横滚的扰动量,由系统伺服控制器根据解算出来的轴系扰动量,通过驱动控制俯仰电机311、方位电机321、横滚电机331进行运动,从而可以利用解耦计算精确的控制扰动消除量,有效消除移动载体的俯仰、方位、横滚扰动。
本实施例中,还包括与主控模块连接的综合显示控制系统,用于接收目标探测信息进行数据处理、显示探测结果以及发送控制命令给主控模块。在具体应用实施例中可采用计算机、笔记本、平板等设备。
如图2所示,本发明光电搜索跟踪装置在具体应用实施例中采用转塔结构,转塔内配置一个红外热像仪11、一个激光测距机12以及三轴陀螺组件2,三轴陀螺组件2采用三轴光纤陀螺,转塔上设置俯仰组件31、方位组件32、横滚组件33以形成方位、俯仰、横滚三框架结构,同时还配置一安装位置编码器等传感器,旋转台的安装基座上配置一个姿态矫正轴框架,与光电转塔平台构成四轴平台;通过系统伺服控制完成全景搜索、扇区搜索、单目标跟踪、完成搜索空域的多目标定位信息提取和单目标跟踪信息处理等功能;电源箱可将220V市电转换为28V直流电源或利用自身配置的蓄电池为系统提供电力;综合显示控制系统作为信息处理和控制中心,包括控制计算机与控制软件,用于接收数字视频信息、搜索跟踪信息和上级系统定向定位信息,解算并输出目标系统定位信息,监视全系统工作状态,输出系统状态信息、转塔控制命令和视频图像,实现搜索跟踪装置的各项功能。
在具体应用实施例中,三轴传动机构均采用交流伺服电机,使用高精度的绝对式编码器作为系统的速度和位置检测器件,侧面板还安装了控制器和电机驱动器。采用SC光纤与电混合滑环作为内部信号传递,以实现360度旋转。通过与光电滑环连接的航空插头与控制计算机连接,航插连接到电子箱和操控计算机,电子箱用于给光电搜索跟踪装置供电,同时采集光纤下传的图像信息到图像处理板。控制计算机发送操控命令到光电搜跟平台的控制板,控制板主要实现任务管理与协调、伺服控制,使系统满足伺服转塔性能指标要求。
本实施例中主控模块具体用于接收控制计算机的操控命令,按不同工作模式实现伺服控制功能,主控模块包括伺服控制器、伺服驱动器,其中伺服控制器主要实现任务管理与协调、伺服控制、跟踪算法,使系统满足伺服转塔性能指标要求;伺服驱动器接受伺服控制器输出的信号驱动方俯仰电机311、位电机321、横滚电机331。
控制计算机具体包括加固计算机、图像处理板、通讯接口以及综合显控软件等,主要实现目标信息及状态信息的显示、系统管理与控制、工作参数的设定、工作模式的切换等功能,综合显控软件是基于加固计算机的专用搜索系统信息显示及控制软件。电源模块具体由AC/DC交流适配器或锂电池组成,在交流220V供电条件下可通过交流适配器提供直流28V给系统供电,在野外可通过24V锂电池给系统供电。
本实施例利用上述光电搜索跟踪装置可以实现移动载体横滚扰动消除,如图3所示,实现移动载体横滚扰动消除步骤为:
步骤1、通过三轴陀螺测量移动载体姿态扰动;
步骤2、通过耦合解算出移动载体扰动在探测轴系横滚的影响;
步骤3、通过伺服控制器进行计算,计算出横滚电机的调整量;
步骤4、驱动横滚电机进行运动,消除移动载体横滚扰动。
本实施例具体分别配置方位、俯仰、横滚的伺服控制回路,以实现方位、俯仰、横滚的闭环控制。本实施例利用上述三轴光电搜索跟踪装置的方法的具体步骤包括:
S1.通过三轴陀螺组件2测量移动载体在方位、俯仰、横滚轴系上的姿态扰动;
S2.根据步骤S1测量到的姿态扰动进行解耦计算,得到旋转台在方位、俯仰、横滚轴系上所需的调整量;
S3.根据步骤S2计算出的调整量对应驱动俯仰组件31、方位组件32以及横滚组件33运动。
在载体运动过程中,上述光电搜索跟踪装置进行目标探测时,不断执行上述步骤,即可实时实现载体方位、俯仰、横滚的扰动消除,从而抑制图像旋转,使得全景拼图连续,确保目标探测的精度。
本实施例系统稳定控制架构如图4所示,其中,A为方位轴系、坐标系为OXaYaZa,A坐标系绕OZb轴的转角为θa;F为俯仰轴系、坐标系为OXfYfZf,F坐标系绕OXa轴的转角为θf;R为横滚轴系、坐标系为OXrYrZr,R坐标系绕OYf轴的转角为θr。
本实施例中步骤S2的步骤包括:
S21.当移动载体(移动载体坐标系为B系)运动时,移动载体的运动将通过移动载体的安装以及轴系的几何约束和摩擦约束向旋转台的台体耦合;
S22.获取由安装在轴系内的三轴陀螺组件2对耦合到探测轴系测量得到的角速度,其中方位、俯仰、横滚轴系的角速度分别为ωfx、ωfy、ωfz;
S23.将步骤S22获取的角速度进行解耦计算,得到方位电机321、俯仰电机311、横滚电机331的控制角速度分别为ωfx*secθf、ωfy、ωfz,其中θf为俯仰轴系OXfYfZf中坐标系绕OXa轴的转角;
S24.根据步骤S23解耦计算的结果,分别计算出方位电机321、俯仰电机311、横滚电机331的控制量,并按照计算出的控制量控制各电机以消除移动载体在方位、俯仰、横滚轴系上产生的扰动。
上述步骤S24中,具体通过分析方位、俯仰、横滚控制回路的传递函数进行控制算法设计,然后根据解耦计算的结果计算出各电机的控制量,对移动载体在方位、俯仰、横滚产生的扰动进行消除,从而消除图像旋转的影响。
本实施例中,还包括目标搜索跟踪控制方法,步骤包括:根据光电传感器模块1探测到的图像进行目标检测跟踪,当检测到目标时,通过对比同一角度位置的前后帧图像,判断目标是否发生移动,以实现移动目标的检测。
在具体应用实施例中,如图5、6所示,光电搜索跟踪装置通过方位轴高速旋转(如550度/秒),旋转台内置成像探测器采集全方位360度俯仰4度的空域图像,每个搜索周期俯仰轴都会进行调整以实现更大范围的俯仰空域侦察。高速搜索过程中的红外热像采集的目标图像会进入处理板分析,将疑似目标通过操控计算机的人机交互界面显示。上位机可对转台发送操控指令,从而达到侦察的可视化效果。
由于在全景搜索时会检测到很多热目标,对于空中目标来说,有碎云层的干扰,这些干扰项都是相对静止的,真正的目标是飞行器,属于高速移动的目标,而移动的目标才是真正有价值的目标,。本实施例动目标检测通过检测同一角度位置的这一次图像和上一次图像的对比,得出此处的目标是否发生了移动,可以实现动目标的高效检测,极大的提高了搜索的效率和精度。
本实施例在目标检测时,进一步还配合搜索热像的摆镜进行光学补偿,能够将高速旋转的的影像进行纠正,使得最后采集的影像是清晰的。
如图7所示,本实施例利用上述光电搜索跟踪装置,获取对待跟踪目标的选择后,通过红外相机将图片采集到图像处理板,图像处理板通过计算目标在图片中离图像中心的位置计算出脱靶量,并将脱靶量传递到光电搜跟平台中转换成角度后,光电搜跟平台控制电机对位置进行控制,最终保持目标始终在图像中心的效果,可以快速将目标锁定并且进行跟踪,可以实现跟踪功能。
本实施例利用上述光电搜索跟踪装置还可以实现定位功能:在跟踪的状态下,俯仰轴的横滚方向的电机(横滚电机)会对移动载体的姿态进行补偿,光电搜索跟踪装置保持在水平状态,此时光电搜索跟踪装置的方位角度和俯仰角度可以准确的对应东北天空间坐标系中的航向角和俯仰角,倾斜角始终为零。在获取了目标的准确距离后,便可以对目标的经纬度进行准确的计算,得出目标经纬度后可传输到显控终端显示最终的目标定位结果,实现定位功能。
如图8所示,本实施例还包括四轴稳像控制步骤,步骤包括:获取移动载体的横滚姿态以及通过三轴陀螺组件2测量旋转台的姿态,闭环控制姿态矫正轴实时矫正旋转台的安装姿态,使得保持旋转台的视轴始终保持在水平位置,以形成四轴稳像控制。具体可通过单轴陀螺仪感知移动载体的横滚姿态,通过电机闭环实时矫正光电搜索跟踪装置安装面姿态,并且通过三轴陀螺组件2采集光电搜索跟踪装置姿态,保持光电搜索跟踪装置的视轴始终保持在水平位置,共同构成四轴稳像机制。
上述稳像功能可配置为在设备使用期间一直运行,移动载体是否在行驶、搜索跟踪装置在惯性空间中的指向均不会变化,可以解决移动载体的高速搜索、高精度跟踪问题,从而适用性更广,可以适应更多更复杂的地形。
上述移动载体具体可以为车辆、无人机等,即可以适用于车辆、无人机等各类移动搜索跟踪场景中。
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
- 具有抑制图像旋转功能的三轴光电搜索跟踪装置及方法
- 一种光电毫米波三坐标搜索跟踪装置及方法