一种黄河垃圾收集船
文献发布时间:2023-06-19 11:34:14
技术领域
本发明属于水上垃圾处理技术领域,具体涉及一种黄河垃圾收集船。
背景技术
这里的陈述仅提供与本发明相关的背景技术,而不必然地构成现有技术。
水面垃圾顾名思义就是悬浮在水面上的垃圾,影响水里的生态,需要打捞。发明人发明,目前黄河流域大部分地区在打捞水中垃圾时为常规柴油发动机船只,在清理完水中垃圾的同时却污染了空气,工人劳动强度大,而且效率相对较低。
现有的公开技术文档中,公开了一种用于水上垃圾清理的船只,其包括以下主要部件:母船只本体和设置在母船只本体的尾部用来驱动母船只本体运动的螺旋桨,母船只本体包括相对设置的左船只本体和右船只本体,左船只本体和右船只本体之间设有垃圾收集子船,垃圾收集子船与母船只本体通过电磁铁连接;母船只本体还设置有控制器、与控制器电连接的超声波传感器和与控制器电连接并能够用于识别水中垃圾的图像识别装置,母船只本体的头部设置有能够打捞水中的垃圾并将垃圾输送至垃圾收集子船上的传送带打捞装置。发明人认为,此种水上垃圾清理船的结构为目前具有普遍代表性的一种方案,其采用传送带直接传送水面垃圾的技术手段,并增加了用于检测垃圾的传感器以实现自动化,但是其所采用的传感器设置复杂,生产成本高,而且不便于运输暂时存储于船上的垃圾。
发明内容
针对现有技术存在的不足,本发明的目的是提供一种黄河垃圾收集船,使用传送带进行水上垃圾收集的同时,还针对水上垃圾的情况设置传感器,便于通过传感器更迅速准确地获取水上垃圾的具体位置,更加精准地实现黄河水上垃圾清理的自动化流程,进而节约人力;设置可转动的后船舷板以便于临时盛放垃圾的箱体运输;同时,本发明中还使用清洁能源,减少清理垃圾的过程中造成的污染。
为了实现上述目的,本发明是通过如下的技术方案来实现:
本发明的技术方案提供了一种黄河垃圾收集船,包括船只本体,船只本体设有动力部,船只本体连接顶篷,船只本体安装传送带,船只本体尾部安装箱体,传送带的末端位于箱体之上,传送带前端的两侧分别铰接板件,工作时两个板件之间由尾端向前端间距渐次增加,板件安装用于检测垃圾的光电传感器,船只本体的尾端铰接后船舷板,后船舷板能够绕船只本体尾部转动达到平行于船只本体甲板的位置;船只本体的顶篷还等距安装多个倾斜于顶篷的太阳能电池板,多个所述太阳能电池板均平行设置,太阳能电池板连接船只本体的动力部和传送带。
上述本发明的技术方案的有益效果如下:
1)本发明中的太阳能电池板的布局较为特殊,采用将多个太阳能电池板倾斜地布置于顶篷的布置方式,只考虑黄河流域垃圾船运行的需要,最大限度利用太阳能,增加了太阳能电池板的总面积,太阳能电池板的面积可以大于顶篷的面积,最大化利用空间;同时由于避免使用传统的柴油机或充电电池,本发明不仅能够避免柴油机油箱漏油现象,避免内燃机运行带来的污染,避免频繁充电,而且能够通过在顶篷之上设置太阳能电池板进一步保护顶篷。
2)本发明中,采用宽度较小的传送带,在传送带的前端配合两个外扩的板件以聚集漂浮在水面的垃圾,并配合光电传感器工作,在降低空船排水量的同时也降低了传送带运行时需要的能源,以减少能源消耗,与太阳能能源相适应。
3)本发明中,为了配合箱体的运输,船体尾部铰接后船舷板,当后船舷板转动至与甲板齐平位置时,箱体可以从后船舷板处运输至岸上。
4)本发明中,用于盛装垃圾的箱体设有小孔,能够进一步过滤垃圾中水分,同时也能够减轻箱体的重量,进一步降低空船时的排水量。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
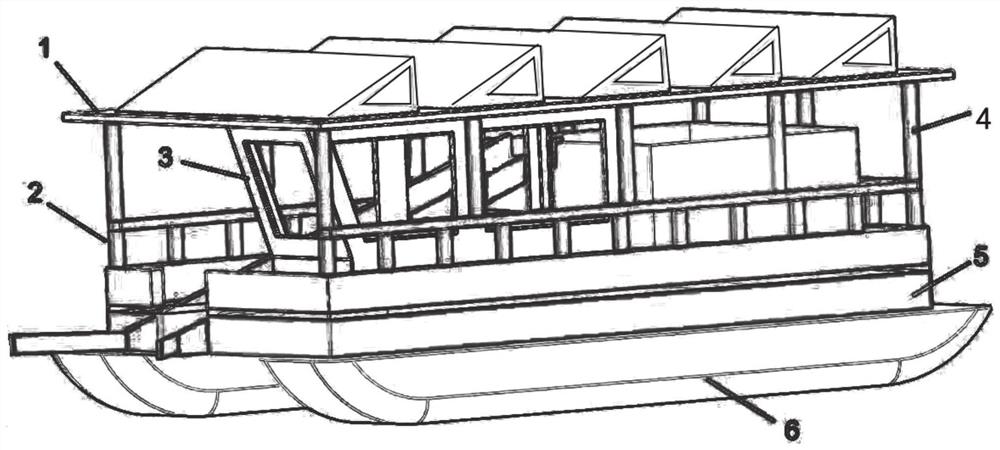
图1是本发明根据一个或多个实施方式的整体立视示意图;
图2是本发明根据一个或多个实施方式的整体俯视示意图;
图3是本发明根据一个或多个实施方式的顶篷以下俯视示意图;
图4是本发明根据一个或多个实施方式的除顶棚外结构的立视示意图;
图5是本发明根据一个或多个实施方式的船舱内布置示意图;
图6是本发明根据一个或多个实施方式的从船底角度观测的整体立视示意图;
图7是本发明根据一个或多个实施方式的后船舷关闭状态示意图;
图8是本发明根据一个或多个实施方式的后船舷展开状态示意图;
图9是本发明根据一个或多个实施方式的太阳能能源系统示意图。
图中:1-顶篷,2-护栏,3-控制室,4-支柱,5-侧舷,6-水下船只本体,7-太阳能电池板,8-箱体,9-传送带,10-甲板,11-扩张爪,12-传感器,13-传送装置控制装置,14-传送带动力源,15-动力部,16-电池组,18-两个水下船只本体之间的船底,19-小孔,20-后船舷板。
为显示各部位位置而夸大了互相间间距或尺寸,示意图仅作示意使用。
具体实施方式
应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另有指明,本发明使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非本发明另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合;
为了方便叙述,本发明中如果出现“上”、“下”、“左”“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
术语解释部分:本发明中的术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或为一体;可以是机械连接,也可以是电连接,可以是直接连接,也可以是通过中间媒介间接相连,可以是两个元件内部连接,或者两个元件的相互作用关系,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明的具体含义。
正如背景技术所介绍的,针对现有技术存在的不足,本发明的目的是提供一种黄河垃圾收集船,使用传送带进行水上垃圾收集的同时,还针对水上垃圾的情况设置传感器,便于通过传感器更迅速准确地获取水上垃圾的具体位置,便于更加精准地实现黄河水上垃圾清理的自动化流程,进而节约人力;同时,本发明中还使用清洁能源,减少清理垃圾的过程中造成的污染。
实施例1
本发明的一种典型实施方式中,请参考附图1~9,本实施例公开了一种黄河垃圾收集船,包括船只本体,船只本体安传送机构,传送机构末端安装用于收集垃圾的箱体,传送机构前端还安装传感器12,传感器12连接控制器,控制器还连接传送机构。本实施例中的动力源采用电机,电机连接螺旋桨;电机连接太阳能电池板7以获取电能,
进一步的,上述的船只本体通过柱子连接顶篷1,本实施例中的太阳能电池板7包括多片,多片太阳能电池板7安装于的上述的船只本体的顶篷1。
更加具体的,为了最大程度获取太阳光,本实施例中多个太阳能电池板7均倾斜地连接于顶篷1。本实施例中的顶篷1采用平面板件,以便于在顶篷1上安装太阳能电池板7。多个太阳能电池板7均平行。
可以理解的是,本实施例中的太阳能电池板7为单晶硅光伏发电板,能够直接将太阳能转化为电能,为了存储这些电能,太阳能电池板7连接一电池组16,电池组16通过变电机构连接需要取电的电机,以保证电机能够得到稳定的电力。
更加具体的,如图9所示,本实施例中的太阳能电池板7连接光伏汇流箱、控制器、电池组16和交流逆变器。汇流箱在光伏发电系统中是保证光伏组件有序连接和汇流功能的接线装置,该装置能够保障光伏系统在维护、检查时易于切断电路,当光伏系统发生故障时减小停电的范围,本实施例中的多个规格相同的光伏电池串联起来,组成光伏串列,若干个光伏串列并联接入光伏汇流箱,在光伏汇流箱内汇流后再连接电池组16,然后通过交流逆变器连接需要交流电的电机。整个过程中,由于避免使用传统的柴油机或充电电池,本实施例不仅能够避免柴油机油箱漏油现象,避免内燃机运行带来的污染,避免频繁充电,而且能够通过在顶篷1之上设置太阳能电池板7进一步减少顶篷1接受的太阳光辐射量。
此外,本实施例中的太阳能电池板7的布局也较为特殊,本实施例中的没有使用太阳能电池板7代替顶篷1,也没有将太阳能电池板7平铺于顶篷1,而是使用将多个太阳能电池板7倾斜地布置于顶篷1的布置方式,只考虑垃圾打捞的需要,最大限度利用太阳能,增加了太阳能电池板7的总面积,太阳能电池板7的面积可以大于顶篷1的面积,最大化利用空间,
进一步的,本实施例的目的是收集漂浮在水面的垃圾,因此使用一个船只本体作为传送机构和用于收集垃圾的箱体的安装基体,便于在水面运动。本实施例中的传送机构包括传送带9,还包括连接于传送带9的传送带控制装置13和传送带动力源14,用于收集垃圾的箱体为一外壁具有多个漏孔的箱体8,箱体8具有开口,传送带9的尾端正对于开口。
更加具体的,船只本体的前侧开设船只本体缺口,传送带9在缺口处连接船只本体,以便于传送带9从船只本体缺口中向前伸出船只本体。
进一步的,本实施例中的船只本体还包括支柱4和护栏2,支柱4下端与船只本体固定连接,支柱4上端与顶篷1固定连接,护栏2固定连接于船只本体边缘部位,船只本体具有甲板10,甲板10安装控制室3和垃圾存储装置,船只本体内部的船舱安装传送带动力源、船只本体动力部15和电池组16,电池组16的连接传送带动力源和船只本体动力部15。此处需要详细介绍本实施例中的船只本体,请参考附图1~7,本实施例中船只本体底侧连接两个水下船只本体6,形成双体船结构;船只本体由船舷和甲板10组成,船舷包括侧舷5和后舷,位于两个水下船只本体6之间部分的甲板10开设槽体以容纳传送带9;镂空箱体8安装于船只本体尾部;甲板10的一侧还安装控制室3。
更加详细的,本实施例中的传送带9的宽度为船只本体宽度的三分之一,其前端突出于船只本体的部分相应地也较窄,这种结构是与本实施例中垃圾船的工作模式相对应的,本实施例中的垃圾船通过检测器能够对垃圾精准定位,进而启动传送带9对垃圾进行清理。
进一步的,本实施例中的传感器12为光电传感器,光电传感器电连接控制器,光电传感器发出的光信号被遮挡物遮挡时,控制器从光电传感器获取这一信号,然后控制器控制上述的传送带9启动。
进一步的,本实施例中的传感器12安装于扩张爪11的前端,扩张爪11后端连接于上述的传送带9的前端,以扩大传送带9前端的覆盖面。
更加详细的,扩张爪11包括两个,两个扩张爪11分别安装于传送带9前端的两侧,且两个扩张爪11呈八字形排列,两个扩张爪11之间的距离由后端至前端依次递增。以其中一个扩张爪11为例,扩张爪11为呈矩形片状的板件,扩张爪11的垂直或倾斜于水面,以便于在水面聚拢垃圾。本实施例中使扩张爪11的目的是扩大传送带9的前端收集面积,同时也配合于本实施例中的太阳能供电形式,使用扩张爪11能够避免设置较宽的传送带9,减少空船时的排水量。
更加详细的,本实施例中的光电传感器安装于所述扩张爪11的前端以及内侧,因此光电传感器的检测方向包括多个,不仅可以检测扩张爪11前方的垃圾,还可以检测夸张抓之内的垃圾,避免垃圾遗漏。
进一步的,本实施例中扩张爪11为可折叠结构,以便于在非工作时段停放垃圾船,扩张爪11的后端通过合页连接至传送带9。合页为有限角度合页,以控制扩张爪11的扩张角度。当需要收缩扩张爪11时,将扩张爪11向船只本体方向折叠。
更加具体的,为了配合扩张爪11的扩张/伸缩动作,扩张爪11和船只本体之间还连接电动推杆作为伸缩动力源,伸缩动力源可以被替换为液压伸缩杆或者连接有动力源的二连杆。
进一步的,上述船只本体具有后船舷板20,所述后船舷板20可以开合至110度。
更加具体的,船只本体的尾段可转动地连接后船舷板20,后船舷板20在向上运动时,能够到达垂直于所述船只本体的位置。
本实施例中垃圾收集机构为一呈长方体的镂空箱体8,本实施例中镂空的确切涵义为,箱体8的壁开设多个小孔。箱体上端面为开口面,上述的传送带9的末端位于此开口面之上方。由于使用镂空箱体8,因此垃圾中的水分能够通过镂空箱体8的壁面直接排出。
船只本体内具有船舱,船舱内安装传送带控制装置13、传送带动力源14、动力部15和电池组16,其中的传送带控制装置13、传送带控制装置13连接传送带动力源14和上述的控制器,传送带动力源14均连接于传送带;此均为现有技术,在此不再赘述。
更加详细的,传送带控制装置13至少包括相连的PLC和继电器,继电器连接传送带动力源14以控制传送带动力源14的启停,PLC连接传送带动力源14以控制传送带动力源14的速度。
上述的传送带动力源和船只本体动力部15均可以采用电机,传送带动力源连接传送机构,船只本体动力部15连接螺旋桨。
进一步的,考虑到本实施例中光电传感器安装在扩张爪11上,而扩张爪11需要与水面接触,因此光电传感器需要进行防水设置,光电传感器安装于防水外壳内,防水外壳为透明材质。
实施例2
本发明的一种典型实施方式中,本实施例公开了一种黄河垃圾收集船的工作方法,使用如实施例1中的黄河垃圾收集船,包括以下步骤:
光电传感器持续工作,光电传感器持续向处理器发送检测信号,当光电传感器发送的检测信号为异常值时,处理器向传送带9发送启动信号,传送带9运行;
船只本体持续向前方运动,扩张爪11将漂浮在水面上的垃圾聚集在传送带9的前端,垃圾随着传送带9运输至镂空箱体8;
当垃圾箱装满后,后船舷板20向下铺展开,以便于箱体8搬运。
实施例3
本发明的一种典型实施方式中,本实施例公开了一种黄河垃圾收集船在黄河水面上收集垃圾的应用。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种黄河垃圾收集船
- 一种智能远程操控垃圾收集船用垃圾收集机构