一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及船舶定位技术领域,尤其涉及一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法。
背景技术
海洋渔业是指从事海洋捕捞和海水养殖的生产事业。海洋捕捞属采集性工业。海水养殖分为鱼虾类养殖、贝类养殖和藻类养殖三大类。海洋渔业因离海岸的远近不同,可分为近海、外海、远洋渔业。我国海岸线长、大陆架面积大,沿海有暖、寒流交汇,沿岸岛屿星罗棋布,港湾较多,滩涂面积广阔,这些都是发展海洋渔业的有利条件。
船舶主要利用雷达数据和定位系统进行经纬度定位,同时利用AIS数据对船舶的航速、航向进行实时报告,但是目前雷达分布不均匀,单点的监视导致船舶监视精度较低,容易引发安全事故。
本发明提出了一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法。
为了实现上述目的,本发明采用了如下技术方案:一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法,包括以下步骤:
步骤1:在监测水域内架设AIS基站和雷达基站,且雷达基站和AIS基站呈网格状分布;
步骤2:每个AIS基站区域内的AIS通信系统接收覆盖区域内船舶的动静态数据,同时利用北斗卫星定位系统对船舶的定位数据坐标进行汇报,且每一秒捕捉一次;
步骤3:利用雷达坐标转换法对每个网格区域内雷达基站对信号覆盖区域内船舶和不明障碍物的坐标位置信息进行汇报,且每一秒捕捉一次;
步骤4:综合雷达数据和AIS数据,区分雷达区域中船舶的位置和不明障碍物的位置,将多个雷达基站同一时间捕捉不明障碍物的定位数据进行重叠,得出不明障碍物坐标点;
步骤5:将多个雷达基站同一时间捕捉船舶坐标位置与北斗卫星定位系统相同时间的北斗定位数据进行重叠,利用对五个散布数据进行计算,获得最终数据坐标点;
步骤6:再将多个不同时间的数据坐标点和不明障碍物坐标点组合建立安全航路曲线,并同时上传和显示在终端电脑上。
优选地,相邻所述雷达基站和AIS基站的距离为十千米。
优选地,所述步骤6中绘制的安全航路曲线图的各数据坐标点和不明障碍物坐标外围均设定安全距离区域,在有重合时,激发预警系统。
优选地,所述安全距离区域为一百米。
优选地,所述步骤4和步骤5计算方法均采用平均值法计算平均坐标值。
本发明具有以下有益效果:
1、该雷达数据与AIS数据、船舶北斗定位数据的数据融合方法,通过设置网格分布的雷达基站,便于船舶行驶在网格监测区域内,四个雷达基站同时对船舶定位数据进行监测,同时结合船舶北斗定位数据,建立安全航路曲线,有效的提升船舶监视的精度,降低安全事故引发的几率。
2、该雷达数据与AIS数据、船舶北斗定位数据的数据融合方法,通过在安全航路曲线设定安全距离,便于在船舶与船舶之间和船舶与不明障碍物之间距离过近时,能提前预警,告知船舶及时进行规避,从而提升船舶行驶的安全性。
附图说明
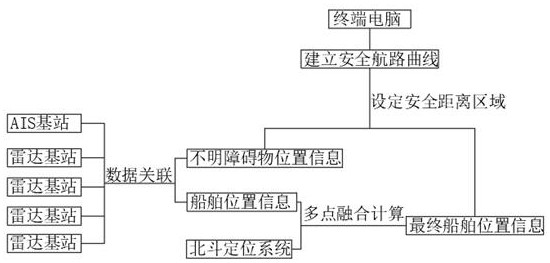
图1为本发明提出的一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法的流程结构示意图;
图2为本发明提出的一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法的安全航路曲线图;
图3为本发明提出的一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法雷达基站信号覆盖图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参照图1-3,一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法,包括以下步骤:
步骤1:在监测水域内架设AIS基站和雷达基站,且雷达基站和AIS基站呈网格状分布,相邻雷达基站和AIS基站的距离为十千米。
步骤2:每个AIS基站区域内的AIS通信系统接收覆盖区域内船舶的动静态数据,同时利用北斗卫星定位系统对船舶的定位数据坐标进行汇报,且每一秒捕捉一次。
步骤3:利用雷达坐标转换法对每个网格区域内雷达基站对信号覆盖区域内船舶和不明障碍物的坐标位置信息进行汇报,且每一秒捕捉一次。
步骤4:综合雷达数据和AIS数据,区分雷达区域中船舶的位置和不明障碍物的位置,将多个雷达基站同一时间捕捉不明障碍物的定位数据进行重叠,计算方法采用平均值法计算平均坐标值,得出不明障碍物坐标点,四个雷达站测定的不明障碍物坐标分别为(Xa,Ya)、(Xb,Yb)、(Xc,Yc)、(Xd,Yd),利用平均值法计算可知障碍物的平均坐标为((Xa+Xb+Xc+Xd)/4,(Ya+Yb+Yc+Yd)/4)。
步骤5:将多个雷达基站同一时间捕捉船舶坐标位置与北斗卫星定位系统相同时间的北斗定位数据进行重叠,利用对五个散布数据进行计算,计算方法采用平均值法计算平均坐标值,获得最终数据坐标点,四个雷达基站测定的船舶坐标分别为(X1,Y1)、(X2,Y2)、(X3,Y3)、(X4,Y4),北斗定位数据坐标为(X5,X6),则船舶最终数据坐标为((X1+X2+X3+X4+X5)/5,(Y1+Y2+Y3+Y4+Y5)/5)。
步骤6:再将多个不同时间的数据坐标点和不明障碍物坐标组合建立安全航路曲线,并同时上传和显示在终端电脑上,绘制的安全航路曲线图的各数据坐标点和不明障碍物坐标外围均设定安全距离区域安全距离区域为一百米,在有重合时,激发预警系统。
本实施例中,通过设置网格分布的雷达基站,便于船舶行驶在网格监测区域内,四个雷达基站同时对船舶定位数据进行监测,同时结合船舶北斗定位数据,建立安全航路曲线,有效的提升船舶监视的精度,降低安全事故引发的几率,通过在安全航路曲线设定安全距离,便于在船舶与船舶之间和船舶与不明障碍物之间距离过近时,能提前预警,告知船舶及时进行规避,从而提升船舶行驶的安全性。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种雷达数据与AIS数据、船舶北斗定位数据的数据融合方法
- 一种基于AIS与雷达数据融合的内河航道交通流检测方法