装卸装置及搬运车
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及搬运车领域,特别涉及装卸装置及搬运车。
背景技术
搬运车是一种常用在物流行业的货物搬运工具,在工厂、仓库、物流中心等场合中的应用越来越多,目前的货物搬运主要采用叉车搬运,叉车提升货物进行搬运,或者采用搬运车,搬运车自身不能实现地面取货和放货,因此需要有一种能方便叉取便于装卸货物的装置。
发明内容
发明的目的在于提供了一种装卸装置及搬运车,旨在解决背景技术的问题。
本发明第一目的是这样实现的,装卸装置,包括车身底盘、叉臂、升降组件,车身底盘设置有导向槽以及所述升降组件,所述叉臂两侧设置有导向轴,所述导向轴置于所述导向槽内,所述叉臂一端设置有货叉,所述叉臂另一端可拆卸连接所述升降组件。
进一步地,所述升降组件包括固定支架、支撑板、第一联动臂以及液压缸,所述车身底盘设置有所述固定支架以及所述支撑板,所述固定支架安装有所述液压缸,所述支撑板上设置有第一联动臂,所述第一联动臂第一端可拆卸连接所述叉臂,所述第一联动臂第二端可拆卸连接所述液压缸。
进一步地,所述升降组件还包括第二联动臂、连接杆,所述第二联动臂第一端可拆卸连接所述叉臂,所述第二联动臂第二端可拆卸连接所述连接杆一端,所述连接杆另一端可拆卸连接所述所述液压缸以及所述第一联动臂第二端。
进一步地,所述叉臂设置有滑槽,所述第一联动臂第一端以及所述第二联动臂第一端设置有轴承,所述轴承置于所述滑槽内并滑动。
进一步地,所述第一联动臂与所述第二联动臂平行设置。
进一步地,所述车身底盘设置有两组升降组件,所述升降组件相对设置。
进一步地,所述装卸装置还包括连接轴,所述连接轴两端固定安装在所述第二联动臂内侧。
进一步地,所述连接杆平行于所述车身底盘。
本发明第二目的是这样实现的,搬运车,所述搬运车设置有上述任意一项所述的装卸装置。
进一步地,所述搬运车还设置有控制模块、驱动模块,定位导航模块,所述控制模块电性连接所述驱动模块、所述定位导航模块。
本发明的有益效果:本发明提供了装卸装置,通过车身底盘设置有升降组件,实现了对叉臂升降的控制,精简的结构设计方便灵活,操作简单。
搬运车,安装有装卸装置,使得搬运车工作中取货、放货不受场地限制,提高搬运效率。
附图说明
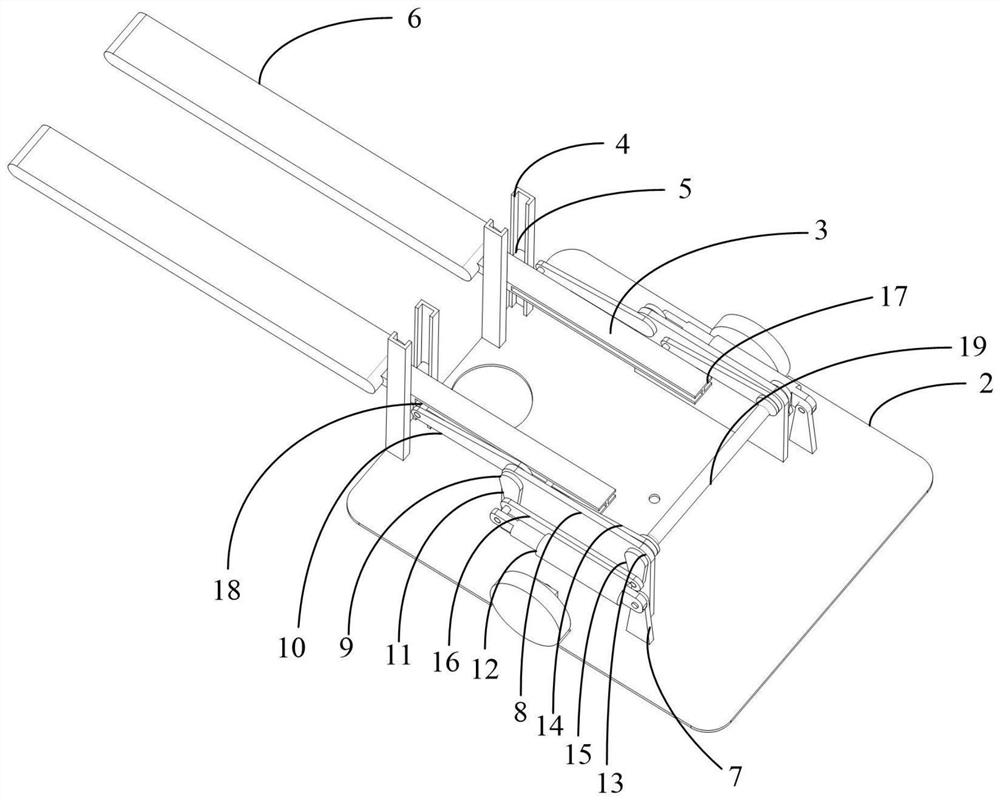
图1是本发明提供的装卸装置的结构图;
图2是本发明提供的搬运车的立体图。
附图标记:1、搬运车;2、车身底盘;3、叉臂;4、导向槽;5、导向轴;6、货叉;7、固定支架;8、支撑板;9、第一联动臂;10、第一联动臂第一端;11、第一联动臂第二端;12、液压缸;13、第二联动臂;14、第二联动臂第一端;15、第二联动臂第二端;16、连接杆;17、滑槽;18、轴承;19、连接轴。
具体实施方式
为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
请参阅图1,本发明提供的装卸装置,包括车身底盘2、叉臂3、升降组件,车身底盘2设置有导向槽4以及升降组件,叉臂3两侧设置有导向轴5,导向轴5置于导向槽4内,叉臂3一端设置有货叉6,叉臂3另一端可拆卸连接升降组件;
升降组件包括固定支架7、支撑板8、第一联动臂9以及液压缸12,车身底盘2设置有固定支架7以及支撑板8,固定支架7安装有液压缸12,支撑板8上设置有第一联动臂9,第一联动臂第一端10可拆卸连接叉臂3,第一联动臂第二端11可拆卸连接液压缸12;升降组件还包括第二联动臂13、连接杆16,第二联动臂第一端14可拆卸连接叉臂3,第二联动臂第二端15可拆卸连接连接杆16一端,连接杆16另一端可拆卸连接液压缸12以及第一联动臂第二端11;叉臂3设置有滑槽17,第一联动臂第一端10以及第二联动臂第一端14设置有轴承18,轴承18置于滑槽17内并滑动;第一联动臂9与第二联动臂13平行设置;车身底盘2设置有两组升降组件,升降组件相对设置;装卸装置还包括连接轴19,连接轴19两端固定安装在第二联动臂13内侧;连接杆16平行于车身底盘2。
需要说明的是,本发明为装卸装置,一般使用时采用两个对称设计升降组件,车身底盘2安装有固定支架7以及支撑板8,通过固定支架7上设置的液压缸12伸出或收缩,实现了驱动第一联动臂第二端11,此时第一联动臂第二端11通过连接杆16连接第二联动臂第二端15,也实现了对第二联动臂第二端15的驱动,此时的第一联动臂第二端11与第二联动臂第二端15为平行状态,而第一联动臂第二端11、第二联动臂第二端15、连接杆16以及支撑板8形成一个平行四边形;在第一联动臂第二端11以及第二联动臂第二端15运动下第一联动臂第一端10以及第二联动臂第一端14进行圆周运动,在支撑板8的作用下保证第一联动臂9以及第二联动臂13的稳定,第一联动臂第一端10以及第二联动臂第一端14设置有轴承18,与叉臂3设置的滑槽17相匹配,使得轴承18可以在滑槽17内滑动,在第一联动臂第一端10以及第二联动臂第一端14圆周运动时,叉臂3实现上下升降,此时的第一联动臂第一端10与第二联动臂第一端14为平行状态,而第一联动臂第一端10、第二联动臂第一端14、叉臂3以及支撑板8形成一个平行四边形;通过导向轴5将叉臂3置于导向槽4内,保证了升降过程中的货叉6的稳定性,有效的防止货叉6跑偏,与此同时,通过连接轴19固定连接第二联动臂13保证了叉臂3的同步升降;需要注意的是货叉6包括具有传送功能的传送叉,传送叉包括传送叉本体、驱动装置以及运输部,运输部设置传送叉本体外侧,传输部为输送线或者链条,驱动装置设置在传送叉本体内,驱动装置驱动运输部对传送叉上的货物进行水平方向的运输。
请参阅图2,本发明提供的搬运车,搬运车1设置有上述任意一项的装卸装置;
搬运车1还设置有控制模块、驱动模块,定位导航模块,控制模块电性连接驱动模块、定位导航模块;
需要说明的是,本发明为搬运车,在搬运车1还是设置有控制模块、驱动模块、定位导航模块,通过控制模块对搬运车1操控,将设置在搬运车1上的装卸装置进行无人驾驶实现对货物的自动取货、放货,无需要人工干预,进一步提高了搬运效率;需要说明的是在装卸装置采用的货叉6为传送叉时,可以在叉臂3升至与搬运车1同一水平高度时间,将已搬运货物运送至搬运车1顶部,货叉6在进行第二次货物叉取,更进一步提高了搬运效率。
应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 装卸装置及搬运车
- 一种应用于AGV搬运车的自动装卸装置