一种基于TLD算法和步态算法的六足多地形追踪机器人
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及人工智能技术领域,具体涉及一种基于TLD算法和步态算法的六足多地形追踪机器人。
背景技术
随着人工智能技术领域的发展,智能机器人越来越多的应用到各种领域,其中智能跟踪机器人研究比较广泛,由于智能跟踪机器人控制系统具有非线性、不确定性、多因素性、多层次性等因素而属于复杂系统,所以仅仅用简单的跟踪模型和单一的控制理论很难达到预期的效果。目前基于智能跟踪机器人对目标位置的判定方式有GPS、红外线测定方位、等方法;对于GPS跟踪方式,因为室内环境比较复杂,GPS的定位精确严重不准,所以不适合室内的智能机器人的跟踪。在遇到复杂地形时,跟踪机器人的移动会受到限制,这对于跟踪很不利,极大程度上限制了跟踪机器人的应用范围。
发明内容
为了解决上述问题,本发明提供了一种基于TLD算法和步态算法的六足多地形追踪机器人。所述树莓派运行的步态算法包括周期步态和非周期步态,所述PC机运行的TLD算法包括检测模块、学习模块、跟踪模块;首先摄像头采集图像信息,然后压缩图像并传入PC机,经PC机转换为opencv图像格式,然后TLD跟踪算法检测行人,根据目标坐标点决策机器人运动方向,然后PC机将指令发送至树莓派,树莓派接收指令调用步态算法,从而机器人完成跟踪,从而大大增加了跟踪的准确性和应用场景。
本发明所采用的技术方案是,一种基于TLD算法和步态算法的六足多地形追踪机器人,包括以树莓派和PC机为主体的两部分;树莓派连接摄像头,且树莓派运行步态算法,PC机运行TLD算法,其中树莓派和PC机之间可以相互通信。
所述步态算法包括周期步态和非周期步态;周期步态包括三角步态,非周期步态包括单脚步态和其它步态。
所述TLD算法包括检测模块、学习模块、跟踪模块,各模块经过整合器整合后可得目标位置。
所述整体追踪流程是首先摄像头采集图像信息,然后压缩图像并传入PC机,经PC机转换为opencv图像格式,然后TLD跟踪算法检测行人,根据目标坐标点决策机器人运动方向,然后PC机将指令发送至树莓派,树莓派接收指令调用步态算法,从而机器人完成跟踪。
本发明的有益效果是:
1、本发明所使用的步态算法包括周期步态和非周期步态,周期步态所采用的三角步态是“六足纲”昆虫最常使用的一种步态,速度快而稳定,非周期步态主要应用于崎岖不平的路段,使之该机器人能应用的场景更加广泛。
2、本发明跟踪检测采用的TLD算法,此算法将跟踪和检测融合在一起,从而解决了纯跟踪算法在目标发生尺度,形状变化时,能够通过检测将找回目标并重新跟踪,大大增加了跟踪的准确性。
3、本发明将摄像头所获取的画面传给PC机,在PC机上对画面进行视觉检测,使算法的运行速度更快更准确。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
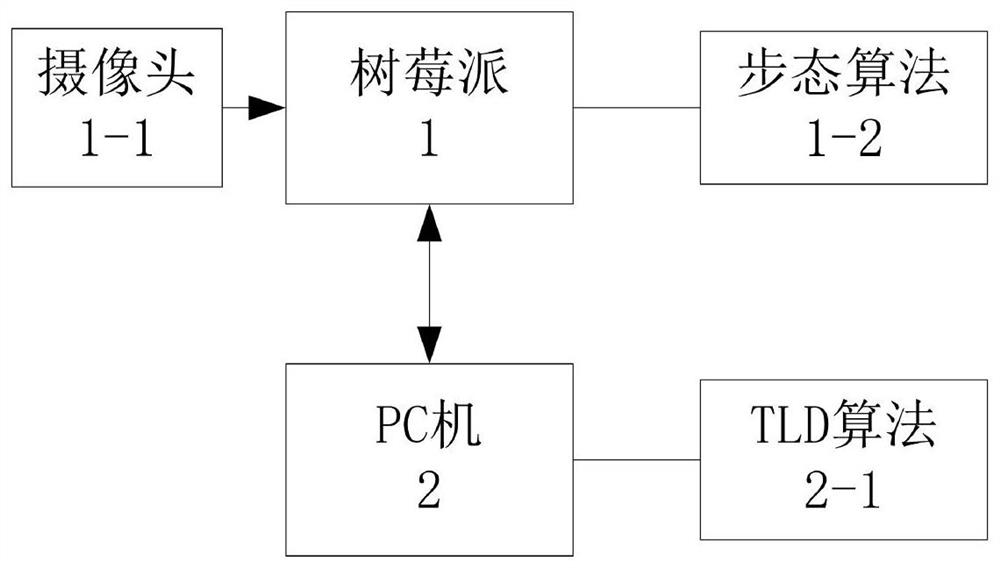
图1是本发明实施例基于TLD算法和步态算法的六足多地形追踪机器人的总体结构示意图,包括以树莓派和PC机为主体的两部分。
图2是本发明实施例基于步态算法的结构示意图。
图3是本发明实施例基于TLD算法的结构示意图。
图4是本发明实施例基于TLD算法和步态算法的整体追踪流程结构示意图。
图中,1、树莓派,1-1、摄像头,1-2、步态算法,1-2-1、周期步态,1-2-1-1、三角步态,1-2-2、非周期步态,1-2-2-1、单脚步态,1-2-2-2、其它步态,2、PC机,2-1、TLD算法,2-1-1、检测模块,2-1-2、学习模块,2-1-3、跟踪模块,2-1-4、整合器,2-1-5、目标位置。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例是一种基于TLD算法和步态算法的六足多地形追踪机器人,如图1所示,包括以树莓派1和PC机2为主体的两部分;树莓派1连接的摄像头1-1用来对现实场景的画面采集;且树莓派1运行步态算法1-2来对六足跟踪机器人的每条腿进行控制,从而使机器人适应各种地形;PC机2运行TLD算法2-1来对摄像头1-1采集的画面进行视觉处理;其中树莓派1和PC机2之间可以相互通信,用于将PC机2视觉处理的结果传给树莓派1,树莓派1反馈给PC机2机器人运行的状态,从而形成闭环系统。
如图2所示,所述步态算法1-2包括周期步态1-2-1和非周期步态1-2-2;周期步态1-2-1包括三角步态1-2-1-1,是“六足纲”昆虫最常使用的一种步态,也被誉为最快速有效的静态稳定步态;非周期步态1-2-2包括单脚步态1-2-2-1和其它步态1-2-2-2,主要应用于崎岖不平的路段,从而使机器人能适应各种地形。
如图3所示,所述TLD算法2-1包括检测模块2-1-1、学习模块2-1-2、跟踪模块2-1-3,检测模块2-1-1和跟踪模块2-1-3将跟踪和检测融合在一起,从而解决了纯跟踪算法在目标发生尺度,形状变化时,能够通过检测将找回目标并重新跟踪,且学习模块2-1-2是在线学习,不需要提前训练,在跟踪的时候不断更新自己的训练数据,从而确保检测的稳定性;各模块经过整合器2-1-4整合后可得目标位置2-1-5,用于发给树莓派1。
如图4所示,所述整体追踪流程是首先摄像头1-1采集图像信息,然后压缩图像并传入PC机2,经PC机2转换为opencv图像格式,然后TLD跟踪算法检测行人,根据目标坐标点决策机器人运动方向,然后PC机2将指令发送至树莓派1,树莓派1接收指令调用步态算法,从而机器人完成跟踪。
本发明实施例的工作原理:
将视觉处理和步态执行两个阶段分开,通过不同的处理器分别进行;树莓派运行步态算法,PC机运行TLD算法,其中树莓派和PC机之间可以相互通信,步态算法包括周期步态和非周期步态,TLD算法包括检测模块、学习模块、跟踪模块,首先摄像头采集图像信息,然后压缩图像并传入PC机,经PC机转换为opencv图像格式,然后TLD跟踪算法检测行人,根据目标坐标点决策机器人运动方向,然后PC机将指令发送至树莓派,树莓派接收指令调用步态算法,从而机器人完成跟踪。
需要说明的是,在本发明中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
本说明书中的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
以上所述仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
- 一种基于TLD算法和步态算法的六足多地形追踪机器人
- 一种基于CPG-Hopf网络耦合算法的水下六足机器人步态生成与转换方法