一种港口集装箱水平搬运无人车卸货系统及方法
文献发布时间:2023-06-19 12:27:31
技术领域
本发明属于无人化港口领域,尤其是一种港口集装箱水平搬运无人车卸货系统及方法。
背景技术
集装箱是远洋货物贸易运输的基础载体,在港口环境中,对集装箱的转移搬运是最基础的工作。在现代化港口运输作业中,通常采用无人机作为载具对集装箱进行转移,在转移至目的地后,通过卸货起重机对集装箱进行吊装与卸载,再将集装箱装上货船或堆叠在码头。通过无人化的操作能够大大减少人工的劳动量,但是由于港口的货物数量繁多,通过无人车进行转移工作时,由于卸货过程缓慢,无人车会存在较多的等待时间,直到起重机完成一次运输才能进行卸货,这无疑对时间造成一定程度浪费。
中国专利CN107720323A公开了一种港口集装箱水平搬运无人车卸货系统及方法,记载了用于解决现有无人车卸货等待时间长,港口运行环境效率低的问题。该申请中利用举升装置与承接装置将无人机顶部的集装箱进行暂时的搁置,从而解放无人机再次投入到下一个转移作业中。但该申请中还需要对无人机安装举升机构,同时在地面上的承接装置等结构会占用地面的空间,不利于港口交通的便利,同时该申请中承接装置与吊升装置等结构之间的配合不够明确简单。
针对相关技术中的问题,目前尚未提出有效的解决方案。
发明内容
发明目的:提供一种港口集装箱水平搬运无人车卸货系统及方法,以克服现有相关技术所存在的上述技术问题。
技术方案:一种港口集装箱水平搬运无人车卸货系统,包括支架,支架内部由底部向上依次设置有升降架、横梁及顶板,横梁内顶部设置有移动装置,移动装置顶部设置有起吊装置,起吊装置底部通过吊索连接有卡接机构,升降架两侧均设置有两个顶推块,顶推块与支架底部之间设置有顶推液压缸,升降架内部设置有横杆,横杆两侧均设置有卡爪机构,卡爪机构顶部设置有与卡接机构相配合的卡接套,升降架正面底部设置有两个距离传感器,卡爪机构下方设置有运载无人车,顶板顶部设置有配重块。
在进一步的实施例中,升降架与横杆形成日字形结构,升降架两侧均设置有两个限位块,支架内侧开设有与限位块相配合的限位槽,能够固定两个卡爪机构,并通过限位槽确保升降架的稳定性与安全性。
在进一步的实施例中,卡接机构包括设置在吊索底部的连接架,连接架为倒凸字形结构且两侧底部均开设有多个等距排布的卡接通孔,卡接通孔内侧在连接架内部相互连通形成容纳腔,容纳腔顶部设置有第一电磁铁,容纳腔底部设置有磁力柱,磁力柱一侧设置有多个穿插过卡接通孔的卡接杆,卡接杆远离连接架的一端底部与连接杆保持活动链接,连接杆底端与连接架一侧底部保持活动连接,连接架底部中间位置设置有两个第二电磁铁,从而能够通过卡接杆的上下移动,实现卡接机构在卡接套内部的安装与拆卸,并且通过第二电磁铁能够帮助卡接机构快速定位,并通过卡接杆与卡接槽的配合,实现卡接机构与卡接套的固定连接。
在进一步的实施例中,卡接套两侧开设有多个等距排列且与卡接杆相配合的卡接槽,卡接套内底部设置有横杆,横杆顶部设置有两个与第二电磁铁相配合的磁块,从而能够将卡接杆固定在卡接槽内部实现连接固定。
在进一步的实施例中,卡爪机构包括设置在卡接套底部的主板,主板内部两侧均开设有滑动腔,滑动腔内部穿插有支撑杆,支撑杆中间位置穿插有与之保持垂直且螺纹配合的螺纹杆,主板顶部中间位置设置有电机室,电机室内底部设置有驱动电机,两个螺纹杆穿插至电机室与驱动电机保持连接,螺纹杆两侧均设置有限位杆,限位杆穿插过支撑杆且固定在滑动腔内部,支撑杆两端底部均设置有箱体卡扣,支撑杆位于箱体卡扣与限位杆之间设置有滑轮,滑动腔顶部与底部开设有与滑轮相配合的轮槽,从而能够通过驱动电机对支撑杆的宽度进行调节,满足不同长度的集装箱的,并且通过箱体卡扣的作用对集装箱进行安装固定,从而实现吊装,保证卡爪机构与集装箱之间的安全稳固性。
在进一步的实施例中,主板顶部两侧均设置有绳索驱动装置,主板顶部正面与背面均设置有发电机,主板正面与背面均设置有若干等距排列的放置侧杆,放置侧杆远离主板的一端之间设置有侧板,从而能够对集装箱进行进一步的吊装固定,通过放下绳索将集装箱底部进行固定,进而进一步增强吊装的安全性能。
在进一步的实施例中,升降架内侧设置有两组与放置侧杆相配合的放置支架,放置支架为内部镂空的梯形结构,且放置支架顶部开设有多个与放置侧杆相配合的放置槽,从而能够将卡爪机构放置在升降架之间,并且通过与放置支架的卡接配合,保证主板在放置过程中的稳定性,便于对集装箱的安装。
在进一步的实施例中,放置侧杆为圆柱形结构,放置槽底部为与放置侧杆同直径的圆弧形结构,且放置槽顶部为弧形结构,从而能够使得放置侧杆能够滑入对应的放置槽中,并且保证其处于居中的位置,进而确保卡爪机构始终处于中间位置,便于操控管理。
根据本发明的另一方面,提供了一种港口集装箱水平搬运无人车卸货的方法,
该港口集装箱水平搬运无人车卸货方法包括:
S1、运载无人车通过定位运行至升降架底部,并通过距离传感器的运行是的运载无人车位于卡爪机构正下方;
S2、通过预设规则,对运载无人车顶部的集装箱进行卡接吊装,实现卡爪机构对集装箱进行固定;
S3、通过卡接机构与卡接套的配合,同时通过起吊装置实现对卡爪机构的吊起;
S4、通过移动装置在横梁顶部进行滑动,将集装箱转移至卸货区域;
S5、卸下集装箱,并将卡爪机构分离集装箱,通过起吊装置与移动装置进行回收;
S6、将卡爪机构悬在升降架上方,实现一次集装箱的卸货。
在一步的实施例中,预设规则为当正在与卡接机构连接的卡爪机构正在对集装箱进行吊装时,另一个位于升降架顶部的卡爪机构下落对集装箱进行吊装;当正在与卡接机构连接的卡爪机构没有与集装箱进行吊装时,运载无人车等待正在运行的卡爪机构回收并对其进行吊装。
有益效果:
1、通过设置两个卡爪机构及可升降的升降架,能够在起吊装置进行集装箱起吊卸货时,对等待的运载无人车进行暂时的卸货,使其进入下一个运转周期,从而提高运载无人车的工作效率,进而提高港口集装箱卸货的效率。
2、通过设置卡爪机构、卡接机构及卡接套,能够对集装箱进行稳定的连接固定,从而保证吊装稳定安全的同时,提高起吊装置与集装箱之间的装配起吊效率,从而加快对集装箱的卸货与装货。
3、通过设置放置侧杆与放置支架,能够在保证卡爪机构稳定的同时,确保其处在升降架两侧的中间位置,便于对支撑杆进行调节以及实现集装箱的吊装,提高稳定性。
4、通过在主板同时设置支撑杆与绳索起吊装置,能够对集装箱进行多方面的吊装保护,对不同类型的集装箱进行不同的卡接安装,从而提高系统的实用性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
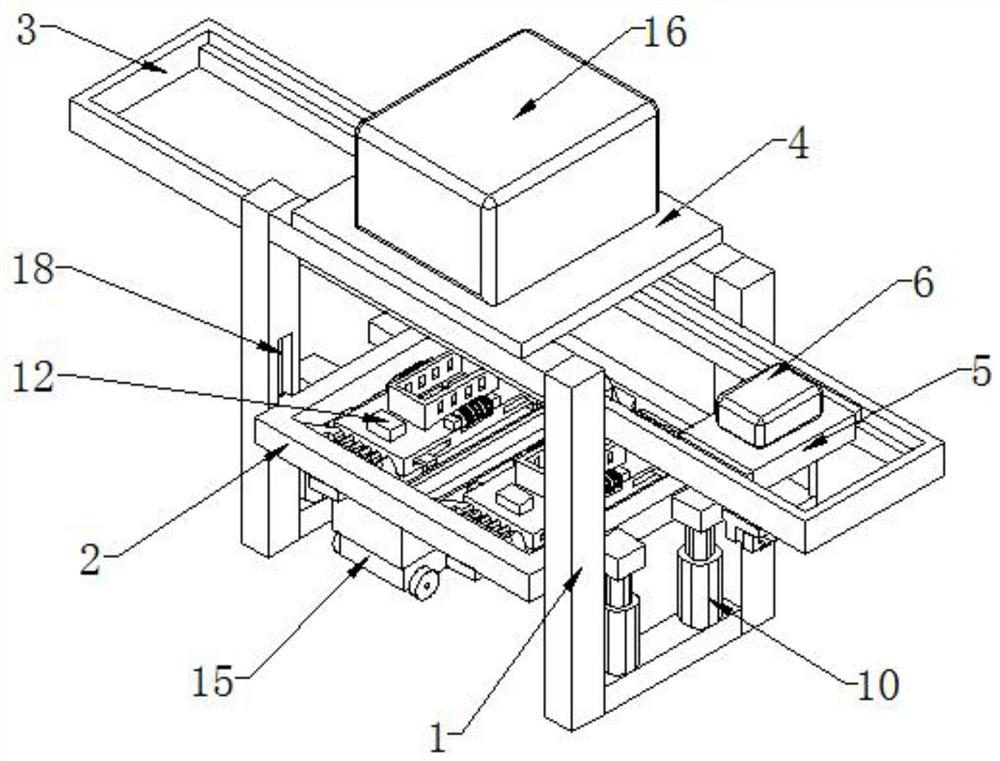
图1是根据本发明实施例的结构示意图;
图2是根据本发明实施例的卡接机构与卡爪机构结构示意图;
图3是根据本发明实施例的卡爪机构结构示意图;
图4是根据本发明实施例的卡爪机构剖视图;
图5是根据本发明实施例的升降架结构示意图;
图6是根据本发明实施例的卡接机构结构示意图;
图7是根据本发明实施例的卡接机构剖视图;
图8是根据本发明实施例的方法流程图。
图中:
1、支架;2、升降架;3、横梁;4、顶板;5、移动装置;6、起吊装置;7、吊索;8、卡接机构;801、连接架;802、卡接通孔;803、容纳腔;804、第一电磁铁;805、磁力柱;806、卡接杆;807、连接杆;808、第二电磁铁;9、顶推块;10、顶推液压缸;11、横杆;12、卡爪机构;1201、主板;1202、滑动腔;1203、支撑杆;1204、螺纹杆;1205、电机室;1206、驱动电机;1207、限位杆;1208、箱体卡扣;1209、滑轮;1210、轮槽;13、卡接套;14、距离传感器;15、运载无人车;16、配重块;17、限位块;18、限位槽;19、卡接槽;20、磁块;21、绳索驱动装置;22、发电机;23、放置侧杆;24、侧板;25、放置支架;26、放置槽。
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
根据本发明的实施例,提供了一种港口集装箱水平搬运无人车卸货系统及方法。
如图1-7所示,根据本发明实施例的港口集装箱水平搬运无人车卸货系统,包括支架1,支架1内部由底部向上依次设置有升降架2、横梁3及顶板4,横梁3内顶部设置有移动装置5,移动装置5顶部设置有起吊装置6,起吊装置6底部通过吊索7连接有卡接机构8,升降架2两侧均设置有两个顶推块9,顶推块9与支架1底部之间设置有顶推液压缸10,升降架2内部设置有横杆11,横杆11两侧均设置有卡爪机构12,卡爪机构12顶部设置有与卡接机构8相配合的卡接套13,升降架2正面底部设置有两个距离传感器14,卡爪机构12下方设置有运载无人车15,顶板4顶部设置有配重块16。
通过本发明的上述方案,通过设置两个卡爪机构12及可升降的升降架2,能够在起吊装置6进行集装箱起吊卸货时,对等待的运载无人车15进行暂时的卸货,使其进入下一个运转周期,从而提高运载无人车15的工作效率,进而提高港口集装箱卸货的效率。通过设置卡爪机构12、卡接机构8及卡接套13,能够对集装箱进行稳定的连接固定,从而保证吊装稳定安全的同时,提高起吊装置6与集装箱之间的装配起吊效率,从而加快对集装箱的卸货与装货。
在一个实施例中,升降架2与横杆11形成日字形结构,升降架2两侧均设置有两个限位块17,支架1内侧开设有与限位块17相配合的限位槽18,从而能够固定两个卡爪机构12,并通过限位槽18确保升降架2的稳定性与安全性。
在一个实施例中,卡接机构8包括设置在吊索7底部的连接架801,连接架801为倒凸字形结构且两侧底部均开设有多个等距排布的卡接通孔802,卡接通孔802内侧在连接架801内部相互连通形成容纳腔803,容纳腔803顶部设置有第一电磁铁804,容纳腔803底部设置有磁力柱805,磁力柱805一侧设置有多个穿插过卡接通孔802的卡接杆806,卡接杆806远离连接架801的一端底部与连接杆807保持活动链接,连接杆807底端与连接架801一侧底部保持活动连接,连接架801底部中间位置设置有两个第二电磁铁808,从而能够通过卡接杆806的上下移动,实现卡接机构8在卡接套13内部的安装与拆卸,并且通过第二电磁铁808能够帮助卡接机构8快速定位,并通过卡接杆806与卡接槽19的配合,实现卡接机构8与卡接套13的固定连接。
卡接机构8的工作原理:进行卡接开始时,第一电磁铁804开始工作,磁力柱805向上运动,此时,卡接杆806与连接杆807之间呈钝角,卡接机构8宽度较窄能够进入卡接套13中。当进入到卡接套13内部时,打开第二电磁铁808,使得第二电磁铁808与磁块20完成对接,然后给第一电磁铁804断电,磁力柱805向下运动,使得卡接杆806与卡接槽19相互卡接,从而使得卡接机构8与卡接套13实现固定连接。此外,在第二电磁铁808的作用下,能够对磁力柱805产生作用力,加强卡接杆806对卡接槽19的作用。最后,通过起吊装置6即可实现集装箱的起吊与卸货。
在一个实施例中,卡接套13两侧开设有多个等距排列且与卡接杆806相配合的卡接槽19,卡接套13内底部设置有横杆,横杆顶部设置有两个与第二电磁铁808相配合的磁块20,从而能够将卡接杆806固定在卡接槽19内部实现连接固定。
在一个实施例中,卡爪机构12包括设置在卡接套13底部的主板1201,主板1201内部两侧均开设有滑动腔1202,滑动腔1202内部穿插有支撑杆1203,支撑杆1203中间位置穿插有与之保持垂直且螺纹配合的螺纹杆1204,主板1201顶部中间位置设置有电机室1205,电机室1205内底部设置有驱动电机1206,两个螺纹杆1204穿插至电机室1205与驱动电机1206保持连接,螺纹杆1204两侧均设置有限位杆1207,限位杆1207穿插过支撑杆1203且固定在滑动腔1202内部,支撑杆1203两端底部均设置有箱体卡扣1208,支撑杆1203位于箱体卡扣1208与限位杆1207之间设置有滑轮1209,滑动腔1202顶部与底部开设有与滑轮1209相配合的轮槽1210,从而能够通过驱动电机1206对支撑杆1203的宽度进行调节,满足不同长度的集装箱的,并且通过箱体卡扣1208的作用对集装箱进行安装固定,从而实现吊装,保证卡爪机构12与集装箱之间的安全稳固性。
卡爪机构12工作原理:顶推液压缸10开上向下拉动升降架2,并在下落过程中,卡爪机构12通过系统计算得到的集装箱长度,对支撑杆1203的宽度进行调节。即控制驱动电机1206的转动带动螺纹杆1204,使得两侧的支撑杆1203在螺纹杆1204的带动下定向移动,而支撑杆1203在限位杆1207与滑轮1209的作用下,保持稳定向两侧移动,直至调节至与集装箱相同的长度。然后,升降架2落在集装箱上方,通过箱体卡扣1208在集装箱顶部的四个卡环中,并完成卡接固定。此时,顶推液压缸10向上推动升降架2使得集装箱脱离运载无人车15,从而使得运载无人车15能够进行下一轮的转移工作。
在一个实施例中,主板1201顶部两侧均设置有绳索驱动装置21,主板1201顶部正面与背面均设置有发电机22,主板1201正面与背面均设置有若干等距排列的放置侧杆23,放置侧杆23远离主板1201的一端之间设置有侧板24,从而能够对集装箱进行进一步的吊装固定,通过放下绳索将集装箱底部进行固定,进而进一步增强吊装的安全性能。
在一个实施例中,升降架2内侧设置有两组与放置侧杆23相配合的放置支架25,放置支架25为内部镂空的梯形结构,且放置支架25顶部开设有多个与放置侧杆23相配合的放置槽26,从而能够将卡爪机构12放置在升降架2之间,并且通过与放置支架25的卡接配合,保证主板1201在放置过程中的稳定性,便于对集装箱的安装。
在一个实施例中,放置侧杆23为圆柱形结构,放置槽26底部为与放置侧杆23同直径的圆弧形结构,且放置槽26顶部为弧形结构,从而能够使得放置侧杆23能够滑入对应的放置槽26中,并且保证其处于居中的位置,进而确保卡爪机构12始终处于中间位置,便于操控管理。
根据本发明的实施例,如图8,还提供了一种港口集装箱水平搬运无人车卸货的方法,该方法包括以下步骤:
S1、运载无人车15通过定位运行至升降架2底部,并通过距离传感器14的运行是的运载无人车位于卡爪机构12正下方;
S2、通过预设规则,对运载无人车15顶部的集装箱进行卡接吊装,实现卡爪机构12对集装箱进行固定;
S3、通过卡接机构8与卡接套13的配合,同时通过起吊装置6实现对卡爪机构12的吊起;
S4、通过移动装置5在横梁3顶部进行滑动,将集装箱转移至卸货区域;
S5、卸下集装箱,并将卡爪机构12分离集装箱,通过起吊装置6与移动装置5进行回收;
S6、将卡爪机构12悬在升降架2上方,实现一次集装箱的卸货。
在一个实施例中,预设规则为当正在与卡接机构8连接的卡爪机构12正在对集装箱进行吊装时,另一个位于升降架2顶部的卡爪机构12下落对集装箱进行吊装;当正在与卡接机构8连接的卡爪机构12没有与集装箱进行吊装时,运载无人车15等待正在运行的卡爪机构12回收并对其进行吊装。
为了方便理解本发明的上述技术方案,以下就本发明在实际过程中的工作原理或者操作方式进行详细说明。
在实际应用时,本卸货系统被安装于港口作业平台上,在正常运行中,装有定位装置的运载无人车15装载集装箱驶入装置内,由于升降架2分位两个部分,所以运载无人车15的运行轨迹被设置成两个专属的轨道,即位于两个卡爪机构12正下方。运载无人车15在系统的控制下,分别进入没有集装箱搁置的卡爪机构12下方,进行卸货。
在实际运行中,当运载无人车15快要来临时,系统开始检测,当检测到与卡接机构8连接的卡爪机构12底部装有集装箱时,运载无人车15驶入升降架2装有卡爪机构12下方的轨道上,前方的距离传感器14检测到并开始记录,直到集装箱完全进入并截止几率,通过计算机运算得到集装箱长度,运载无人车15运行至卡爪机构12的正下方。此时,顶推液压缸10开上向下拉动升降架2,并在下落过程中,卡爪机构12通过系统计算得到的集装箱长度,对支撑杆1203的宽度进行调节。即控制驱动电机1206的转动带动螺纹杆1204,使得两侧的支撑杆1203在螺纹杆1204的带动下定向移动,而支撑杆1203在限位杆1207与滑轮1209的作用下,保持稳定向两侧移动,直至调节至与集装箱相同的长度。然后,升降架2落在集装箱上方,通过箱体卡扣1208在集装箱顶部的四个卡环中,并完成卡接固定。此时,顶推液压缸10向上推动升降架2使得集装箱脱离运载无人车15,从而使得运载无人车15能够进行下一轮的转移工作。
当起吊装置6与移动装置5完成一次卸货后,进行回收时,由于此时升降架2上方有一个集装箱,所以先将上方的卡爪机构12卸载到升降架2的另一侧,即移动装置5运行到其上方松开卡接机构8使得卡爪机构12脱落至升降架2上方,第一电磁铁804通电运行,使得磁力柱805向上运动,此时,卡接杆806与连接杆807之间呈钝角,卡接机构8宽度较窄能够进入卡接套13中。当进入到卡接套13内部时,打开第二电磁铁808,使得第二电磁铁808与磁块20完成对接,然后给第一电磁铁804断电,磁力柱805向下运动,使得卡接杆806与卡接槽19相互卡接,从而使得卡接机构8与卡接套13实现固定连接。此外,在第二电磁铁808的作用下,能够对磁力柱805产生作用力,加强卡接杆806对卡接槽19的作用。最后,通过起吊装置6即可实现集装箱的起吊与卸货。
综上所述,借助于本发明的上述技术方案,通过设置两个卡爪机构12及可升降的升降架2,能够在起吊装置6进行集装箱起吊卸货时,对等待的运载无人车15进行暂时的卸货,使其进入下一个运转周期,从而提高运载无人车15的工作效率,进而提高港口集装箱卸货的效率。通过设置卡爪机构12、卡接机构8及卡接套13,能够对集装箱进行稳定的连接固定,从而保证吊装稳定安全的同时,提高起吊装置6与集装箱之间的装配起吊效率,从而加快对集装箱的卸货与装货。通过设置放置侧杆23与放置支架25,能够在保证卡爪机构12稳定的同时,确保其处在升降架2两侧的中间位置,便于对支撑杆1203进行调节以及实现集装箱的吊装,提高稳定性。通过在主板1201同时设置支撑杆1203与绳索驱动装置21,能够对集装箱进行多方面的吊装保护,对不同类型的集装箱进行不同的卡接安装,从而提高系统的实用性。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种港口集装箱水平搬运无人车卸货系统及方法
- 港口集装箱水平搬运无人车卸货系统及方法