一种单轮自平衡轨道超声检测设备
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及超声无损检测技术领域,特别涉及一种单轮自平衡轨道超声检测设备。
背景技术
为了确保机车的安全运行,铁路系统需要经常对钢轨进行探伤检测,以探测钢轨的轨头和轨腰范围内(包括接头附近)的疲劳缺陷和焊接缺陷,以及轨底锈蚀和月牙掉块、轨头压溃等损伤情况,以便及时采取补救措施,防患于未然。
现有的钢轨超声波探伤车一般包括车架、前桥、后桥、两个主动轨行轮和两个从动轨行轮,前桥可拆卸安装在车架的前端,两个主动轨行轮分别设置在前桥的两端,后桥可拆卸安装在车架的后端,两个从动轨行轮分别设置在后桥的两端。然而,这种双轮结构的钢轨超声波探伤车的车身过长,十分占用空间,整体重量过于笨重,搬运相当不方便,存在着检测可靠性不够高、检测效率低下的缺陷,为检测带来诸多不便。
发明内容
本发明所要解决的问题是提供一种单轮自平衡轨道超声检测设备,这种单轮自平衡轨道超声检测设备具有自我平衡控制能力,能够自主行走,占用空间小,大大减轻整体重量,搬运方便,提高检测可靠性与检测效率。
为了解决上述技术问题,本发明采用的技术方案如下:
一种单轮自平衡轨道超声检测设备,其特征在于:包括轮架、探轮、控制器、通讯模块、控制终端、方向惯性轮组、两个激光传感装置、两个避障模块和能够驱动探轮行走的第一驱动装置,以及能够驱动方向惯性轮组转动的第二驱动装置;轮架上设有可转动的轮轴,探轮安装在轮轴上;控制器、通讯模块、方向惯性轮组、第一驱动装置、第二驱动装置、两个激光传感装置、两个避障模块均安装在轮架上;轮轴与第一驱动装置的动力输出端传动连接;方向惯性轮组与第二驱动装置的动力输出端传动连接并处于探轮的上方;两个激光传感装置分别处于探轮的前侧与后侧,两个避障模块分别处于探轮的前侧与后侧;两个激光传感装置的信号输出端、两个避障模块的信号输出端、探轮的信号输出端、方向惯性轮组的信号输出端分别与控制器相应的信号输入端电连接,第一驱动装置的信号输入端、第二驱动装置的信号输入端与控制器相应的信号输出端电连接;控制器通过通讯模块与后台的控制终端无线连接;两个激光传感装置用于实时检测轨道钢轨轮廓并获取探轮下方的钢轨信息,两个避障模块用于检测探轮在行走方向的一定范围内是否遇到障碍物,方向惯性轮组用于控制探轮在行走方向上的平衡姿态。
上述前、后的定义为:沿探轮的行走方向,探轮向前行走的一侧为前,另一侧为后。
通常,上述第一驱动装置与第二驱动装置为驱动电机。
上述探轮先通过两个激光传感装置实时检测轨道钢轨轮廓,获取探轮下方的钢轨信息,进行信号采集并处理成姿态信号;然后控制器将接收到的姿态信号反馈给第二驱动装置,通过第二驱动装置形成垂直与轮轴平面内的反力矩来驱动方向惯性轮组,以此来控制探轮在行走方向上的平衡姿态;再由控制器将采集到的控制指令通过通讯模块发送给后台的控制终端,控制终端获取探轮的运行轨迹后,自动安装运行轨迹;接着,利用探轮前后侧的两个避障模块实时检测行进方向一定范围内的障碍物情况,再由控制终端通过通讯模块对控制器发送运动指令,控制器接收指令后向第一驱动装置输出控制信号,第一驱动装置驱动探轮按照运行轨迹转动,实现探轮进行前进后退运动;最后,探轮通过行走覆盖了轨道钢轨的检测区域,控制器采集到探轮的检测信号,通过通讯模块将检测到的数据传输到后台的控制终端,实现超声检测功能。
由于方向惯性轮组是通过第二驱动装置来驱动转动的,第二驱动装置会形成垂直与轮轴平面内的反力矩,进而产生与重力分量相反的回复力,这样当回复力大于重力分量便能够使得探轮恢复到平衡状态。这种单轮自平衡轨道超声检测设备通过第一驱动装置的正反转来实现单一探轮的前进后退,通过方向惯性轮组的转动维系整个超声检测设备的自平衡,使得整个超声检测设备具有自我平衡控制能力,能够自主行走,占用空间小,大大减轻整体重量,搬运方便,提高检测可靠性与检测效率。
作为本发明的优选方案,所述方向惯性轮组包括中部转向惯性轮、前后向惯性轮和两个左右向惯性轮,中部转向惯性轮安装在所述轮架顶部的中心位置上,前后向惯性轮安装在轮架上,两个左右向惯性轮分别安装在轮架顶部的前侧与后侧,中部转向惯性轮处于两个左右向惯性轮之间,中部转向惯性轮、前后向惯性轮与两个左右向惯性轮均与所述第二驱动装置的动力输出端传动连接。上述控制器从激光传感装置采集信号并处理成姿态信号,通过高速PID算法来控制各个方向上的惯性轮。上述中部转向惯性轮用于控制整个超声检测设备沿轨道方向运行,调节整个超声检测设备前进或后退时的转向角度。上述两个左右向惯性轮用于控制整个超声检测设备在左右方向上的平衡姿态,调节整个超声检测设备向左倾的角度或向右倾的角度;上述前后向惯性轮用于控制整个超声检测设备在前后方向上的平衡姿态,调节整个超声检测设备在前后方向的俯仰角度。当探轮在钢轨上行走行偏而产生倾角时,控制器通过调节第二驱动装置的转速与转向,让第二驱动装置控制相应的惯性轮在一定时间内进行加速转动而产生冲量,形成反作用力而克服探轮的侧翻力矩,使之回到平衡位置,也可控制相应的惯性轮在转动过程中减速而利用惯性轮的冲量来平衡侧翻力矩,使探轮保持平衡。
作为本发明的优选方案,所述激光传感装置包括激光支架、激光传感器A、激光传感器B、激光传感器C和激光传感器D,激光支架安装在所述轮架上,激光传感器A与激光传感器B均安装在激光支架的上方,并且激光传感器A处于激光传感器B的前侧;激光传感器C与激光传感器D均安装在激光支架的下方,并且激光传感器C处于激光传感器D的前侧。上述各个激光传感器能够实时检测轨道钢轨的轮廓,将轨道钢轨的轮廓信息经过数字化处理,使后台的控制终端获得探轮前侧下方与后侧方的钢轨信息。上述激光传感器A、激光传感器B、激光传感器C与激光传感器D均采用激光轮廓传感器,利用激光三角反射式原理,激光轮廓传感器发出激光束被放大形成一条激光线投射到被测物体表面上,反射光透过高质量光学系统,被投射到成像矩阵上,经过计算得到传感器到被测表面的距离(Z轴)和沿着激光线的位置信息(X轴),得到一组三维测量值。从而,通过对激光传感器AC和激光传感器BD的信号比较,可以获得探轮的倾斜角度信息;通过对激光传感器AB和激光传感器CD的信号比较,可以获得探轮的俯仰角度信息;通过比较探轮前侧的激光传感器A与激光传感器C的信号(处于探轮的前进方向),可以获得探轮前进方向的偏转角度。
作为本发明的优选方案,所述通讯模块为采用5G网络的天线。
作为本发明的优选方案,所述避障模块为避障雷达。上述避障雷达能够在运行过程中高频实时检测行进方向一定范围内的障碍物情况。
作为本发明的优选方案,所述探轮具有多个探芯,各探芯均匀设置在探轮的轮面上。上述各探芯均匀设置在探轮的轮面上,使得各探芯能够以不同角度覆盖钢轨上的轨头、轨腰和轨底等检测区域,对钢轨进行全面超声检测。
作为本发明的优选方案,所述轮架的轮轴上设有陀螺传感器,陀螺传感器的信号输出端与所述控制器相应的信号输入端电连接。在轮架的轮轴上设置陀螺传感器,用于检测轮架的倾斜情况。上述控制器根据陀螺传感器的检测倾斜方向,控制驱动装置的动力输出端的正/反转向,使得轮架向倾斜方向移动。
作为本发明的优选方案,所述轮架的下端设有两个可夹合的限位夹爪。由于钢轨的截面形状呈工字型,轮架下端的限位夹爪可夹紧安装在钢轨上,使整个超声检测设备能够牢固在钢轨上行走。
作为本发明的优选方案,还包括喷洒扫石装置,喷洒扫石装置包括两个水箱、两条输液管和两个喷头,两个水箱中均盛有耦合液,两个水箱与两个喷头分别相对安装在所述轮架上,两个水箱的出液口通过相应输液管与相应喷头的进液端连接,两个喷头的出液口分别朝向所述探轮的下方。使用时,两个喷头的出液口对准探轮的下方,打开喷头,将水箱内的耦合液通过相应输液管输送到喷头,利用喷头将耦合液喷洒在探轮下方的钢轨表面,使超声波能更好的进入钢轨内部,以保证探轮到钢轨的耦合能够中和超声波的无损传播。
一种具体方案中,这种单轮自平衡轨道超声检测设备还包括两个电池,两个电池均安装在所述轮架上,两个电池分别为所述控制器、通讯模块、相应的激光传感装置、避障模块、陀螺传感器、喷洒扫石装置提供电能。
本发明与现有技术相比,具有如下优点:
这种单轮自平衡轨道超声检测设备通过第一驱动装置的正反转来实现单一探轮的前进后退,通过方向惯性轮组的转动维系整个超声检测设备的自平衡,使得整个超声检测设备具有自我平衡控制能力,能够自主行走,占用空间小,大大减轻整体重量,搬运方便,提高检测可靠性与检测效率。
附图说明
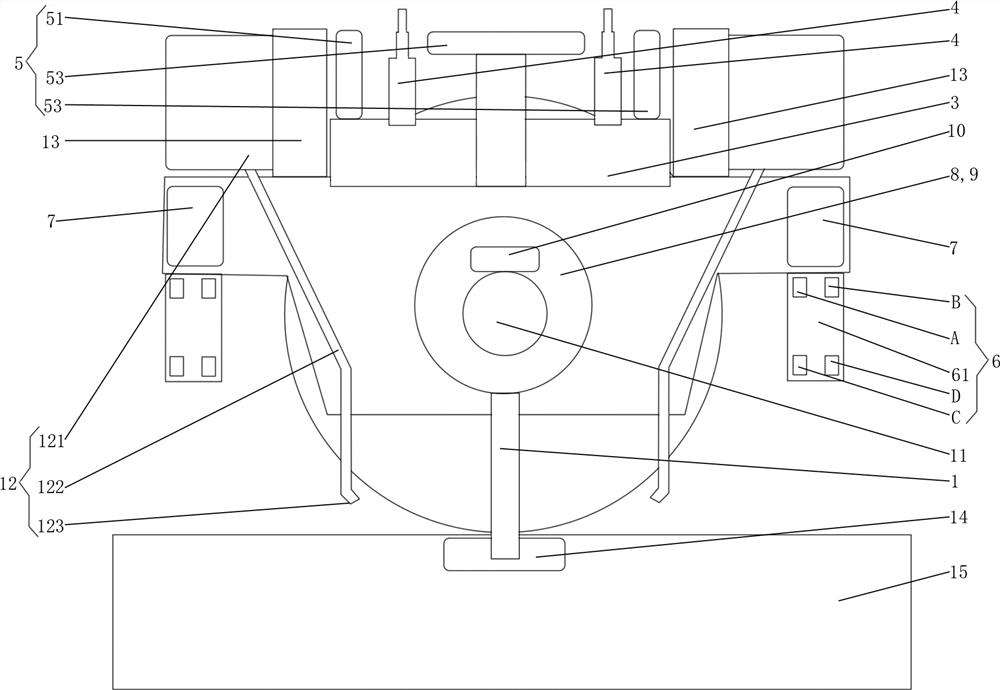
图1是本发明具体实施例的结构示意图;
图2是图1的俯视图;
图3是图2中方向惯性轮组的右视图。
具体实施方式
下面结合附图和具体实施例对本发明进行具体描述。
如图1-3所示,本实施例中的单轮自平衡轨道超声检测设备,包括轮架1、探轮2、控制器3、通讯模块4、控制终端(图中未标示)、方向惯性轮组5、两个激光传感装置6、两个避障模块7和能够驱动探轮2行走的第一驱动装置8,以及能够驱动方向惯性轮组5转动的第二驱动装置9;轮架1上设有可转动的轮轴11,探轮2安装在轮轴11上;控制器3、通讯模块4、方向惯性轮组5、第一驱动装置8、第二驱动装置9、两个激光传感装置6、两个避障模块7均安装在轮架1上;轮轴11与第一驱动装置8的动力输出端传动连接;方向惯性轮组5与第二驱动装置9的动力输出端传动连接并处于探轮2的上方;两个激光传感装置6分别处于探轮2的前侧与后侧,两个避障模块7分别处于探轮2的前侧与后侧;两个激光传感装置6的信号输出端、两个避障模块7的信号输出端、探轮2的信号输出端、方向惯性轮组5的信号输出端分别与控制器3相应的信号输入端电连接,第一驱动装置8的信号输入端、第二驱动装置9的信号输入端与控制器3相应的信号输出端电连接;控制器3通过通讯模块4与后台的控制终端无线连接;两个激光传感装置6用于实时检测轨道钢轨15轮廓并获取探轮2下方的钢轨15信息,两个避障模块7用于检测探轮2在行走方向的一定范围内是否遇到障碍物,方向惯性轮组5用于控制探轮2在行走方向上的平衡姿态。
上述前、后的定义为:沿探轮2的行走方向,探轮2向前行走的一侧为前,另一侧为后。
通常,上述第一驱动装置8与第二驱动装置9为驱动电机。
上述通讯模块4为采用5G网络的天线。
上述避障模块7为避障雷达。上述避障雷达能够在运行过程中高频实时检测行进方向一定范围内的障碍物情况。
方向惯性轮组5包括中部转向惯性轮51、前后向惯性轮52和两个左右向惯性轮53,中部转向惯性轮51安装在所述轮架1顶部的中心位置上,前后向惯性轮52安装在轮架1上,两个左右向惯性轮53分别安装在轮架1顶部的前侧与后侧,中部转向惯性轮51处于两个左右向惯性轮53之间,中部转向惯性轮51、前后向惯性轮52与两个左右向惯性轮53均与所述第二驱动装置9的动力输出端传动连接。上述控制器3从激光传感装置6采集信号并处理成姿态信号,通过高速PID算法来控制各个方向上的惯性轮。上述中部转向惯性轮51用于控制整个超声检测设备沿轨道方向运行,调节整个超声检测设备前进或后退时的转向角度。上述两个左右向惯性轮53用于控制整个超声检测设备在左右方向上的平衡姿态,调节整个超声检测设备向左倾的角度或向右倾的角度;上述前后向惯性轮52用于控制整个超声检测设备在前后方向上的平衡姿态,调节整个超声检测设备在前后方向的俯仰角度。当探轮2在钢轨15上行走行偏而产生倾角时,控制器3通过调节第二驱动装置9的转速与转向,让第二驱动装置9控制相应的惯性轮在一定时间内进行加速转动而产生冲量,形成反作用力而克服探轮2的侧翻力矩,使之回到平衡位置,也可控制相应的惯性轮在转动过程中减速而利用惯性轮的冲量来平衡侧翻力矩,使探轮2保持平衡。
激光传感装置6包括激光支架61、激光传感器A、激光传感器B、激光传感器C和激光传感器D,激光支架61安装在所述轮架1上,激光传感器A与激光传感器B均安装在激光支架61的上方,并且激光传感器A处于激光传感器B的前侧;激光传感器C与激光传感器D均安装在激光支架61的下方,并且激光传感器C处于激光传感器D的前侧。上述各个激光传感器能够实时检测轨道钢轨15的轮廓,将轨道钢轨15的轮廓信息经过数字化处理,使后台的控制终端获得探轮2前侧下方与后侧方的钢轨15信息。上述激光传感器A、激光传感器B、激光传感器C与激光传感器D均采用激光轮廓传感器,利用激光三角反射式原理,激光轮廓传感器发出激光束被放大形成一条激光线投射到被测物体表面上,反射光透过高质量光学系统,被投射到成像矩阵上,经过计算得到传感器到被测表面的距离(Z轴)和沿着激光线的位置信息(X轴),得到一组三维测量值。从而,通过对激光传感器AC和激光传感器BD的信号比较,可以获得探轮2的倾斜角度信息;通过对激光传感器AB和激光传感器CD的信号比较,可以获得探轮2的俯仰角度信息;通过比较探轮2前侧的激光传感器A与激光传感器C的信号(处于探轮2的前进方向),可以获得探轮2前进方向的偏转角度。
探轮2具有多个探芯,各探芯均匀设置在探轮2的轮面上。上述各探芯均匀设置在探轮2的轮面上,使得各探芯能够以不同角度覆盖钢轨15上的轨头、轨腰和轨底等检测区域,对钢轨15进行全面超声检测。
轮架1的轮轴11上设有陀螺传感器10,陀螺传感器10的信号输出端与所述控制器3相应的信号输入端电连接。在轮架1的轮轴11上设置陀螺传感器10,用于检测轮架1的倾斜情况。上述控制器3根据陀螺传感器10的检测倾斜方向,控制第一驱动装置的动力输出端的正/反转向,使得轮架1向倾斜方向移动。
轮架1的下端设有两个可夹合的限位夹爪14。由于钢轨15的截面形状呈工字型,轮架1下端的限位夹爪14可夹紧安装在钢轨15上,使整个超声检测设备能够牢固在钢轨15上行走。
这种单轮自平衡轨道超声检测设备还包括喷洒扫石装置12,喷洒扫石装置12包括两个水箱121、两条输液管122和两个喷头123,两个水箱121中均盛有耦合液,两个水箱121与两个喷头123分别相对安装在所述轮架1上,两个水箱121的出液口通过相应输液管122与相应喷头123的进液端连接,两个喷头123的出液口分别朝向所述探轮2的下方。使用时,两个喷头123的出液口对准探轮2的下方,打开喷头123,将水箱121内的耦合液通过相应输液管122输送到喷头123,利用喷头123将耦合液喷洒在探轮2下方的钢轨15表面,使超声波能更好的进入钢轨15内部,以保证探轮2到钢轨15的耦合能够中和超声波的无损传播。
这种单轮自平衡轨道超声检测设备还包括两个电池13,两个电池13均安装在所述轮架1上,两个电池13分别为所述控制器3、通讯模块4、相应的激光传感装置6、避障模块7、陀螺传感器、喷洒扫石装置提供电能。
上述探轮2先通过两个激光传感装置6实时检测轨道钢轨15轮廓,获取探轮2下方的钢轨15信息,进行信号采集并处理成姿态信号;然后控制器3将接收到的姿态信号反馈给第二驱动装置9,通过第二驱动装置9形成垂直与轮轴11平面内的反力矩来驱动方向惯性轮组5,以此来控制探轮2在行走方向上的平衡姿态;再由控制器3将采集到的控制指令通过通讯模块4发送给后台的控制终端,控制终端获取探轮2的运行轨迹后,自动安装运行轨迹;接着,利用探轮2前后侧的两个避障模块7实时检测行进方向一定范围内的障碍物情况,再由控制终端通过通讯模块4对控制器3发送运动指令,控制器3接收指令后向第一驱动装置8输出控制信号,第一驱动装置8驱动探轮2按照运行轨迹转动,实现探轮2进行前进后退运动;最后,探轮2通过行走覆盖了轨道钢轨15的检测区域,控制器3采集到探轮2的检测信号,通过通讯模块4将检测到的数据传输到后台的控制终端,实现超声检测功能。
由于方向惯性轮组5是通过第二驱动装置9来驱动转动的,第二驱动装置9会形成垂直与轮轴11平面内的反力矩,进而产生与重力分量相反的回复力,这样当回复力大于重力分量便能够使得探轮2恢复到平衡状态。这种单轮自平衡轨道超声检测设备通过第一驱动装置8的正反转来实现单一探轮2的前进后退,通过方向惯性轮组5的转动维系整个超声检测设备的自平衡,使得整个超声检测设备具有自我平衡控制能力,能够自主行走,占用空间小,大大减轻整体重量,搬运方便,提高检测可靠性与检测效率。
此外,需要说明的是,本说明书中所描述的具体实施例,其各部分名称等可以不同,凡依本发明专利构思所述的构造、特征及原理所做的等效或简单变化,均包括于本发明专利的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。