一种基于聚能射流的机器人排爆系统用引爆销毁装置
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及未爆弹药销毁领域,具体是一种基于聚能射流的机器人排爆系统用引爆销毁装置。
背景技术
2019年起全军大力推广实施实战实训、按纲施训,不断深化新时代练兵实践,大抓实战化训练,而手榴弹投掷训练作为新兵训练的基本内容,训练基数大,随之而来的是产生的未爆手榴弹数量大大增加,未爆手榴弹,即已经解除手榴弹保险而未正常作用的手榴弹。
未爆手榴弹的排除作为未爆弹药排除领域中安全风险最高的未爆弹药,常规的销毁方法有炸药殉爆法、非接触聚能射流引爆销毁法等,非接触聚能射流引爆销毁装置可在不接触未爆手榴弹的条件下将其引爆,但由于手榴弹在扔出后保险装置因机械故障未能正常作用时,受到外部轻微扰动就有可能二次击发,发生爆炸伤人事故,以上方法销毁处理方法均需要作业人员抵近未爆手榴弹,作业风险极高。
随着科技的发展,部分人员研究了排爆机械手、排爆机器人等无人化排爆装置,通过无人化设备将聚能射流销毁装置运送至未爆手榴弹附近,从根源上杜绝了销毁过程中对人员安全的威胁,但远程操作无人化设备无法精准的将聚能射流销毁装置与未爆手榴弹对准,人员也不能准确的判断是否对准,一旦起爆而未能手榴弹引爆,将进一步提高销毁风险。
发明内容
本发明的目的在于提供一种基于聚能射流的机器人排爆系统用引爆销毁装置,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种基于聚能射流的机器人排爆系统用引爆销毁装置,包括底座、间隔安装在所述底座上的引爆舱体和聚能引爆机构,所述聚能引爆机构连接有起爆接收器,所述起爆接收器安装在底座内;远程控制端通过起爆接收器控制聚能引爆机构工作;所述引爆舱体靠近聚能引爆机构的侧表面开设有射流通过孔,所述聚能引爆机构发射的高能能量通过射流通过孔作用于引爆舱体内的待引爆弹体。
作为本发明进一步的方案:所述聚能引爆机构通过固定侧板安装在底座上,所述固定侧板上开设有与射流通过孔相对应的孔。
作为本发明再进一步的方案:所述底座、引爆舱体和固定侧板的制作材料均采用非金属材料。
作为本发明再进一步的方案:所述底座与引爆舱体和固定侧板通过螺栓连接。
作为本发明再进一步的方案:所述起爆接收器与底座采用一体装配结构,所述起爆接收器连接聚能引爆机构的快接元件预留在底座外。
作为本发明再进一步的方案:所述引爆舱体的顶部设有导向口,用于引导待引爆弹体落入引爆舱体内。
作为本发明再进一步的方案:所述远程控制端与起爆接收器通过有线通信模块连接和无线通信模块连接。
作为本发明再进一步的方案:所述起爆接收器连接有与远程控制端通讯连接的电源模块,所述远程控制端控制所述电源模块为起爆接收器供电。
作为本发明再进一步的方案:所述远程控制端选用数字无线遥控起爆器。
作为本发明再进一步的方案:所述聚能引爆机构选用非接触聚能引爆装置。
与现有技术相比,本发明的有益效果是:在待引爆弹体销毁排除过程中,射流通过孔与聚能引爆机构的高能能量通道对应,确保高能能量精准对准待引爆弹体,在彻底销毁待引爆弹体的同时,只需作业人员远程操控起爆接收器,确保了作业人员的人身安全。
附图说明
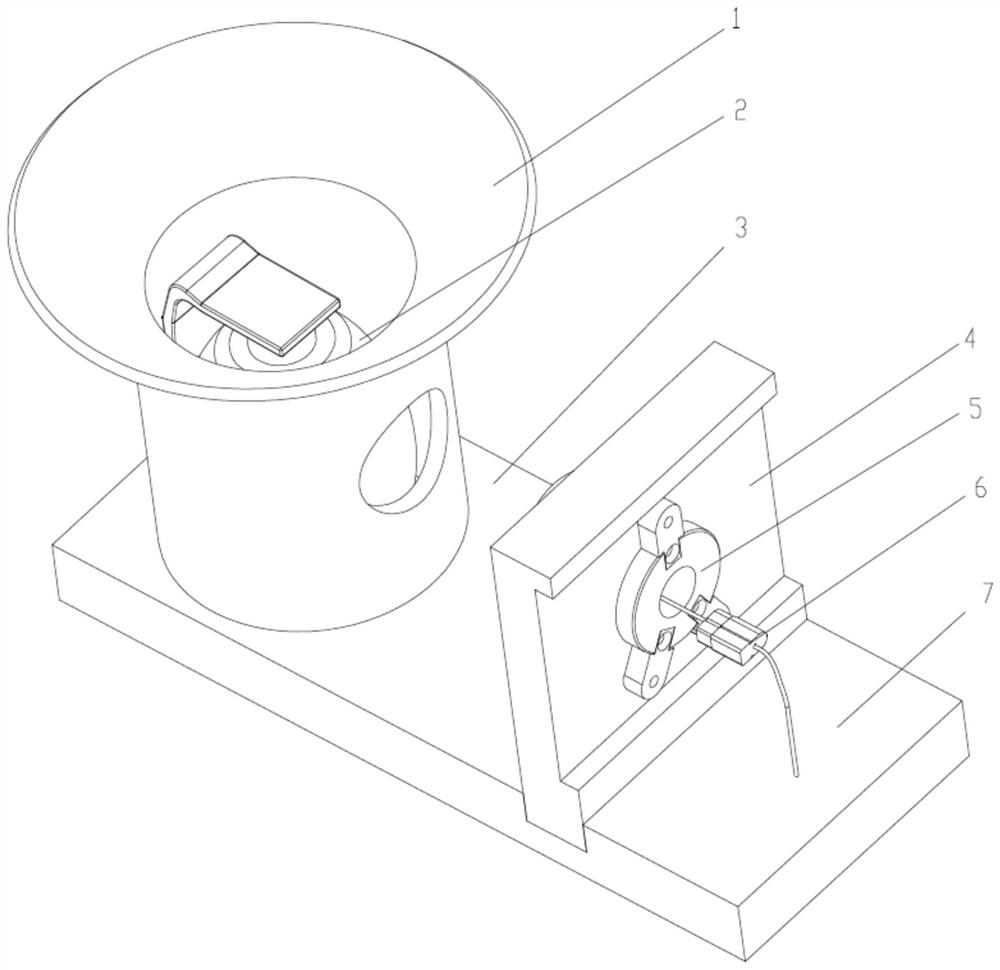
图1为本发明实施例中基于聚能射流的机器人排爆系统用引爆销毁装置的结构示意图。
附图中:1-手榴弹舱体,2-未爆手榴弹,3-底座,4-固定侧板,5-聚能引爆机构,6-连接插头,7-起爆接收器。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实施例公开的一些方面相一致的装置和方法的例子。
请参阅图1,本发明的一个实施例中,一种基于聚能射流的机器人排爆系统用引爆销毁装置,包括底座5、间隔安装在所述底座3上的引爆舱体和聚能引爆机构5,所述聚能引爆机构5连接有起爆接收器7,所述起爆接收器7安装在底座内;远程控制端通过起爆接收器7控制聚能引爆机构5工作;所述引爆舱体靠近聚能引爆机构的侧表面开设有射流通过孔,所述聚能引爆机构5发射的高能能量通过射流通过孔作用于引爆舱体内的待引爆弹体。
具体的,待引爆弹体是未爆手榴弹2,引爆舱体作为手榴弹舱体1使用,用于引爆销毁未爆手榴弹2;所述聚能引爆机构5通过固定侧板4安装在底座3上,所述固定侧板4上开设有与射流通过孔相对应的孔;手榴弹舱体1上开有射流通过孔,射流通过孔达到孔轴线与固定侧板4上装配聚能引爆机构的孔的孔轴线重合。
本实施例的工作过程:当作战训练等出现未爆手榴弹2时,在安全地带提前设置好基于聚能射流的机器人排爆系统用引爆销毁装置,根据具体情况设置防御工事,之后用排爆机器人或移动排爆机械手将未爆手榴弹2夹取投送进入手榴弹舱体1中;投送完成之后机器人或移动机械手撤离,作业人员远程遥控打开起爆接收器7,然后依次进行解除保险和起爆操作,起爆操作之后,起爆接收器7控制聚能引爆机构发射高能能量,高能能量通过射流通过孔作用于手榴弹舱体1内的未爆手榴弹2,完成未爆手榴弹2的引爆销毁。
因此,在未爆手榴弹2销毁排除过程中,射流通过孔与聚能引爆机构的高能能量通道对应,确保高能能量精准对准未爆手榴弹2,在彻底销毁未爆手榴弹2的同时,只需作业人员远程操控起爆接收器7,起爆接收器7控制聚能引爆机构发射高能能量,高能能量通过射流通过孔作用于手榴弹舱体1内的未爆手榴弹2;确保了作业人员的人身安全。
进一步的,所述底座3、引爆舱体和固定侧板4的制作材料均采用非金属材料;采用非金属材料,可以降低未爆手榴弹2销毁引起的附带毁伤。
所述底座3与引爆舱体和固定侧板4通过螺栓连接。所述引爆舱体和固定侧板4的底部分别设有螺纹孔,所述底座3上设有与引爆舱体和固定侧板4的底部螺纹孔相对应的螺纹孔。
模块化的设计装配,使得引爆销毁装置整体结构设计巧妙,操作便捷,安全可靠;引爆销毁装置全部零部件均选用非金属材料,附带毁伤低;销毁作业现场环境相对复杂时,结合提前在引爆销毁装置周围设置的防御工事,进一步确保销毁作业现场周围环境的安全。
请参阅图1,本发明的一个优选实施例中,所述起爆接收器7与底座3采用一体装配结构,所述起爆接收器7连接聚能引爆机构的快接元件预留在底座3外。
所述快接元件采用连接插头6,用于连接起爆接收器7与聚能引爆机构,在起爆接收器7与底座3生产时,就将起爆接收器7安装在底座3的内部,仅留出连接插头6在底座3外,便于与聚能引爆机构的快速组装;
另外,所述聚能引爆机构通过螺栓安装在固定侧板4上,所述固定侧板4通过螺栓安装在底座3上;且在所述螺栓螺纹口上涂抹少量快速粘接剂,比如914快速粘接剂,避免出现松动现象,提高聚能引爆机构装配的稳定性和精度。
进一步的,所述引爆舱体的顶部设有导向口,用于引导待引爆弹体落入引爆舱体内。所述导向口向外沿延伸设置,在机器人将未爆手榴弹2夹取投送进入手榴弹舱体1的时候,提高了投入的精确性,也降低了投入难度,进而节约了排爆所需时间,提高作业安全性。
请参阅图1,本发明的另一个实施例中,所述远程控制端与起爆接收器通过有线通信模块连接和无线通信模块连接。
所述聚能引爆机构选用非接触聚能引爆装置,所述远程控制端选用数字无线遥控起爆器;所述有线通信模块采用通讯总线,所述无线通信模块包括WIFI模组或2.4G模组或蓝牙模组;采用有线通信模块和无线通信模块并行方案,确保远程控制端与起爆接收器之间的信号传递的可靠性和安全性。
进一步的,所述起爆接收器连接有与远程控制端通讯连接的电源模块,所述远程控制端控制所述电源模块为起爆接收器供电。所述电源模块包括蓄电池和通讯继电器,所述通讯继电器设置在蓄电池与起爆接收器之间,所述通讯继电器与远程控制端通讯,即与数字无线遥控起爆器通讯;数字无线遥控起爆器通过通讯继电器控制蓄电池为起爆接收器供电,进而控制非接触聚能引爆装置引爆手榴弹舱体1内的未爆手榴弹2。
本发明的工作原理:一个应用场景中,待引爆弹体是未爆手榴弹2,引爆舱体作为手榴弹舱体1使用,用于引爆销毁未爆手榴弹2;所述聚能引爆机构5通过固定侧板4安装在底座3上,所述固定侧板4上开设有与射流通过孔相对应的孔;在安全地带提前设置好引爆销毁装置,之后用排爆机器人或移动排爆机械手将未爆手榴弹2夹取投送进入手榴弹舱体1中;投送完成之后机器人或移动机械手撤离,作业人员远程遥控打开起爆接收器7,起爆接收器7控制聚能引爆机构发射高能能量,高能能量通过射流通过孔作用于手榴弹舱体1内的未爆手榴弹2,完成未爆手榴弹2的引爆销毁。在未爆手榴弹2销毁排除过程中,射流通过孔与聚能引爆机构的高能能量通道对应,确保高能能量精准对准未爆手榴弹2,只需作业人员远程操控起爆接收器7,确保了作业人员的人身安全。
需要说明的是,本发明所采用的非接触聚能引爆装置为现有技术的应用,本专业技术人员能够根据相关的描述实现所要达到的功能,或通过相似的技术实现所需完成的技术特性,在这里就不再详细描述。
本领域技术人员在考虑说明书及实施例处的公开后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由权利要求指出。
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
- 一种基于聚能射流的机器人排爆系统用引爆销毁装置
- 一种排爆装置及基于聚能射流引爆的排爆机器人