多光谱激光雷达系统及其工作方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于测绘技术领域,具体涉及一种多光谱激光雷达系统及其工作方法。
背景技术
激光雷达自出现以来,经过了由简单到复杂、由低级到高级的发展过程,其种类不断增加,功能不断完善和发展,应用领域越来越广泛深入,并成为近年来快速发展的一种新型的对地观测技术。在对地观测遥感数据获取过程中,激光雷达通常只以单波长方式工作,为了能更好的利用现有激光雷达技术的对地观测能力,目前国内外的研究主要是融合单波长激光回波信号的强度信息和三维信息进行数据处理,能快速获取地表三维空间信息,同时还得到了单波长回波强度信息。虽然其在三维空间信息获取方面具有突出优点,但在对地物的物性探测分类、状态等方面,受单一波长探测能力限制,难以从根本上改善激光雷达由于单一波长所造成的地物性探测能力上的不足。
目前,随着激光雷达技术瓶颈的突破及成本的不断降低,多线车规级激光雷达(如Velodyne、Robosense等)的应用得到普及,在自动驾驶领域主要用来测量障碍物的距离和形态。高精度单线激光雷达(如Riegl激光雷达产品)在测绘领域应用广泛,有越来越多的国内外厂家将激光雷达布设在无人机、无人船等载体上进行测绘应用。激光雷达系统在地形地貌测绘、电力通道巡检、公路铁路勘察、应急地形测绘等领域的应用表现优异。
单波长激光雷达具备高精度三维空间分辨探测能力,却不具备光谱探测能力,无法对地物物性进行判别。如同被动光学遥感是从全色相机→多光谱相机→高光谱相机的发展趋势一样,激光雷达对地观测技术也将面临从单波长→双波长→多波长的发展趋势。然而,就目前情况,两种及以上不同波长激光回波的激光雷达系统,技术难度大,生产成本高,系统操作复杂,还停留在研发阶段。
发明内容
本发明的目的在于提供一种多光谱激光雷达系统及其工作方法,该系统提高了激光雷达对地物的多光谱激光探测能力,进而实现地物的精细分类。
为实现上述目的,本发明采用的技术方案是:一种多光谱激光雷达系统,包括激光雷达、多光谱相机、组合惯导、机载控制器、电源模块、卫星定位天线和挂载装置,所述激光雷达用于获取三维空间数据,所述多光谱相机用于获取不同谱段特征的光谱数据,所述激光雷达和多光谱相机通过组合惯导集成,所述组合惯导为激光雷达和多光谱相机同步授时,以保证激光雷达点云数据与多光谱影像数据同步,所述机载控制器控制激光雷达、多光谱相机协同工作完成数据采集,并保存组合惯导数据,所述电源模块为系统供电,所述卫星定位天线通过馈线连接组合惯导,以实时接收卫星信号并传给组合惯导,组合惯导实时记录多光谱激光雷达系统的位置和姿态。
进一步地,所述组合惯导主要由惯性传感器和板卡接收机组成,所述卫星定位天线通过馈线连接板卡接收机,以实时接收卫星信号,并传给板卡接收机实时记录卫星定位数据,所述组合惯导实时记录多光谱激光雷达系统的姿态,所述组合惯导通过USB或无线方式进行外部配置以及所存储数据的传输,所述组合惯导通过串口和PPS信号线与激光雷达连接,以为激光雷达提供空间位姿数据和同步时间戳。
进一步地,所述机载控制器通过网络接口与激光雷达通信,以对激光雷达进行参数配置、状态查询与控制以及数据采集,所述机载控制器通过串口与组合惯导通信,以实时存储组合惯导数据。
进一步地,所述电源模块包括供电电池和电压转换模块,所述供电电池通过供电接口接入系统,为激光雷达、组合惯导和机载控制器供电,并经电压转换模块连接多光谱相机,以为其供电。
进一步地,还包括底部中空的壳体,所述多光谱相机、组合惯导、机载控制器和电源模块通过安装架安装于壳体内侧,所述多光谱相机的拍摄方向朝下,所述激光雷达安装于壳体外旁侧;所述卫星定位天线和挂载装置设于壳体外侧,所述壳体上设有天线接口,所述馈线通过天线接口连接卫星定位天线与组合惯导。
进一步地,所述挂载装置经减震器与壳体连接。
进一步地,包括天线固定杆,所述天线固定杆安装于挂载装置上,所述卫星定位天线安装于天线固定杆外端部,并经馈线连接组合惯导。
进一步地,所述挂载装置为快拆结构,所述挂载装置上设有滑块,所述滑块与飞行器挂载架上的滑轨相配合,并在两者配合后通过手拧螺钉进行限位,以实现挂载装置与飞行器的快速装拆。
本发明还提供了所述多光谱激光雷达系统的工作方法,包括以下步骤:
1)系统开始工作后,通过卫星定位天线实时接收卫星信号并传给组合惯导,组合惯导实时记录多光谱激光雷达的位置和姿态;
2)激光雷达发射脉冲信号,获取三维空间数据和回波信号强度信息,并实时接收组合惯导的卫星定位位置和时间戳;多光谱相机获取地物的光谱信息;
3)机载控制器分别与激光雷达、多光谱相机以及组合惯导通信,控制它们协同工作,并保存点云数据、光谱数据和组合惯导数据;
4)工作完成后,导出点云数据、光谱数据和组合惯导数据,以进行数据处理;然后关闭系统,停止工作。
进一步地,所述步骤4中,按如下方法进行数据处理:
对惯导数据进行处理,得到空间位姿数据;
对点云数据进行预处理,然后结合空间位姿数据处理点云数据,得到LAS文件;
对光谱数据进行拼接处理,并对拼接影像进行地物分类,得到影像分类信息;
融合LAS文件和影像分类信息,得到最终分类完成的LAS文件。
相较于现有技术,本发明具有以下有益效果:提供了一种融合激光雷达和多光谱相机的一体化多光谱激光雷达系统,该系统不同于现有单波长激光雷达技术,不仅实现了激光雷达对地物的多光谱激光探测能力,而且有效减小整机体积、重量和功耗。该系统集成了激光雷达、多光谱相机、组合惯导和机载控制器,激光雷达和多光谱相机同时获取光谱数据和三维点云数据,组合惯导实时记录激光雷达系统的位姿,并为激光雷达和多光谱相机提供精确授时。机载控制器控制激光雷达和多光谱相机协同工作,同步采集地物空间信息和光谱信息,实现了多光谱激光发射、接收、扫描成像、激光光谱数据处理,使数据同时包括多光谱与几何信息,实现了光谱影像辅助点云地物精细分类的功能。
附图说明
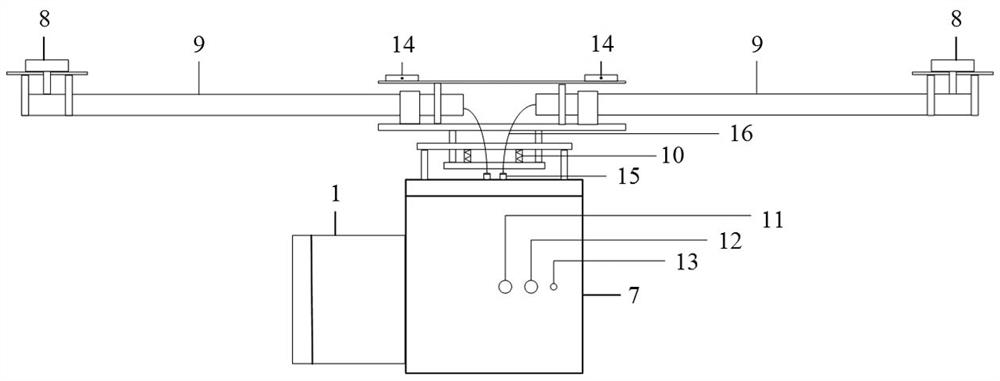
图1是本发明实施例的整体结构示意图。
图2是本发明实施例的内部结构左视图(去掉卫星定位天线、挂载装置和部分壳体)。
图3是本发明实施例的内部结构后视图(去掉卫星定位天线、挂载装置和部分壳体)。
图中:1-激光雷达,2-惯性传感器,3-板卡接收机,4-机载控制器,5-电压转换模块,6-多光谱相机,7-壳体,8-GPS天线,9-天线固定杆,10-减震器,11-供电接口,12-数据读取接口,13-控制器开关,14-挂载装置,15-天线接口,16-馈线。
具体实施方式
下面结合附图及具体实施例对本发明作进一步的详细说明。
如图1-3所示,本发明提供了一种多光谱激光雷达系统,包括激光雷达1、多光谱相机6、组合惯导、机载控制器4、电源模块、卫星定位天线8和挂载装置14。所述激光雷达用于获取三维空间数据,所述多光谱相机用于获取不同谱段特征的光谱数据,所述激光雷达和多光谱相机通过组合惯导集成,所述组合惯导为激光雷达和多光谱相机同步精确授时,以保证激光雷达点云数据与多光谱影像数据同步,即同时为激光雷达和多光谱相机提供时间同步信号,以实现系统的数据同步采集,所述机载控制器控制激光雷达、多光谱相机协同工作完成数据采集,并保存组合惯导数据。所述电源模块为系统供电。在本实施例中,卫星定位天线8为GPS天线,所述GPS天线通过馈线连接组合惯导,以实时接收卫星信号并传给组合惯导,组合惯导实时记录多光谱激光雷达系统的位置和姿态。
其中,所述组合惯导主要由惯性传感器2和板卡接收机3组成,所述GPS天线8通过馈线16连接板卡接收机3,以实时接收卫星信号,并传给板卡接收机3实时记录卫星定位数据,所述组合惯导实时记录多光谱激光雷达系统的姿态,所述组合惯导通过USB或无线方式进行外部配置以及所存储数据的传输,所述组合惯导通过串口和PPS信号线与激光雷达1连接,以为激光雷达系统提供空间位姿数据和同步时间戳。
所述机载控制器4通过网络接口与激光雷达1通信,以对激光雷达1进行参数配置、状态查询与控制以及数据采集,所述机载控制器4通过串口与组合惯导通信,以实时存储组合惯导数据。
所述电源模块包括供电电池和电压转换模块5,所述供电电池5通过供电接口接入系统,为激光雷达1、组合惯导和机载控制器4供电,并经电压转换模块5连接多光谱相机,以为其供电。在本实施例中,选择电压为12V的锂电池作为系统电源,通过供电接口11为系统供电。供电电压为直流12V,机载控制器4、激光雷达1和组合惯导都为宽电压输入,12V在供电电压范围内,多光谱相机6工作电压为5V,电压转换模块5采用12V转5V的降压模块,为多光谱相机供电。
本系统还包括底部中空的壳体7,所述多光谱相机6、组合惯导、机载控制器4和电源模块通过安装架安装于壳体7内侧,所述多光谱相机6的拍摄方向朝下,所述激光雷达1安装于壳体7外旁侧。所述GPS天线8和挂载装置14设于壳体7外侧,所述壳体7上设有天线接口15,所述馈线16通过天线接口15连接GPS天线8与组合惯导。所述挂载装置经减震器10与壳体连接。系统还包括天线固定杆9,所述天线固定杆9安装于挂载装置14上,所述GPS天线8安装于天线固定杆外端部,并经馈线连接组合惯导。
在本实施例中,所述挂载装置14为快拆结构,所述挂载装置上设有滑块,所述滑块与飞行器挂载架上的滑轨相配合,沿滑轨将系统滑到轨道尽头,并在两者配合后通过手拧螺钉进行限位,以实现挂载装置与飞行器的快速装拆。
在本实施例中,壳体7选用ABS塑料材质/轻质铝材,采用手板工艺压制,拆卸方便,设计样式美观,能够嵌入电源开关机按键、数据接口、天线接口、控制器开关机显示灯、预留多光谱相机存储卡插拔空间,喷涂载荷名字,侧面喷涂航天logo,能有效保护内部设备。
本发明还提供了上述多光谱激光雷达系统的工作方法,包括以下步骤:
1)系统开始工作后,通过GPS天线8实时接收卫星信号并传给组合惯导,组合惯导实时记录多光谱激光雷达的位置和姿态。
2)激光雷达1发射脉冲信号,获取三维空间数据和回波信号强度信息,并实时接收组合惯导的GPS位置和时间戳;多光谱相机6获取地物的光谱信息。
3)机载控制器4分别与激光雷达1、多光谱相机6以及组合惯导通信,控制它们协同工作,并保存点云数据、光谱数据和组合惯导数据。激光雷达点云数据和组合惯导数据存储在机载控制器中,光谱数据存储在多光谱相机中。
4)工作完成后,通过数据读取接口导出点云数据、光谱数据和惯导数据,以进行数据处理;然后关闭系统,停止工作。其中,按如下方法进行数据处理:
组合惯导获得的惯导数据以二进制文件保存,通过惯导数据解算软件对惯导数据进行处理,得到空间位姿数据。
对惯导数据进行处理,得到空间位姿数据;
对激光雷达获得的进行预处理,然后结合空间位姿数据处理点云数据,得到LAS文件;
多光谱相机拍摄的照片中,单色照片传感器以tif格式保存照片,RGB三原色照片传感器则以jpeg格式保存。对光谱数据通过影像拼接软件进行拼接处理,得到最终的图片以tif格式保存,并对拼接影像进行地物分类,得到影像分类信息。
融合LAS文件和影像分类信息,得到最终的分类完成的LAS文件。
本发明提供了一种多光谱激光雷达系统,该系统将小型多线激光雷达与多光谱相机两种不同类型设备集成,小型多线激光雷达获取地表三维数据,多光谱相机获取地物不同普段特征的光谱数据,完成点云和多光谱影像数据的同步采集,同时实现多光谱分辨和高精度三维空间分辨观测,解决了单波长激光雷达不具备光谱探测能力的缺点。
激光雷达点云数据和多光谱影像数据是基于同一空间参考点同步采集获取的,其匹配性要优于独立分次采集,高精度的组合惯导可保证点云高程误差在10cm内,影像数据可达到免相控测绘精度。将多光谱相机反馈的光谱特征写入到对应点云中点的属性中,实现测量数据点云中每个观测点都同时包含多光谱与几何信息,通过点云数据综合展现空间、强度、光谱特征,实现地物精细分类,提升点云分类效率和准确率。
以上是本发明的较佳实施例,凡依本发明技术方案所作的改变,所产生的功能作用未超出本发明技术方案的范围时,均属于本发明的保护范围。
- 多光谱激光雷达系统及其工作方法
- 一种基于无线通讯网络的激光雷达系统及其工作方法