一种具有物体位移测量计算功能的智能网络摄像机
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于机械领域,尤其涉及一种具有物体位移测量计算功能 的智能网络摄像机。
背景技术
目前的网络相机一般只具备视频拍摄和传输功能,对视频具体的 分析处理应用需要远端的计算机系统完成,这样数据利用的成本比较 高,由于图片数据量较大,进行网络传输时速度受限,数据传输到远 端计算机系统再进行计算应用的稳定性也差。
发明内容
为解决上述问题,本发明提供了一种具有物体位移测量计算功能 的智能网络摄像机。本发明可以实现在摄像机前端集成实际应用的计 算处理,在前端就可以获取所需要的位移数据,然后在打包传输到后 端服务器,并且前端可以根据计算结果确定是否回传视频数据到后端 服务器,这样就可以节约数据传输的成本。
为达到上述技术效果,本发明的技术方案是:
一种具有物体位移测量计算功能的智能网络摄像机,所述摄像机 主体和安装在智能网络摄像机内的前端位移测量设备;摄像机主体与 前端位移测量设备通讯连接;前端位移测量设备通讯连接后端服务器; 所述摄像机主体进行摄像得到视频,前端位移测量设备通过流地址获 取实时视频;前端位移测量设备解码视频中的图片并对图片处理得到 目标物体的位移量;
前端位移测量设备判断目标物体位移量大于预设的最大位移阈值、发 现异常视频数据才发送对应视频到后端服务器,否则不发送视频到到 后端服务器。
进一步的改进,所述前端位移测量设备包括参数预先设置模块、 位移测量计算模块和网络传输模块;
所述参数预先设置模块用于安装前端位移测量设备时,进行摄像机主 体标定以及设置参考图像和目标物体移动区域;
所述位移测量模块用于跟踪实时采集的目标图像中物体相对于参考 图像的位移,通过计算参考图像与目标图像中目标物体移动区域内特 征图像块的相似性获取目标物体的位移量;位移测量模块还用于判断 异常情况;
所述网络传输模块用于传输目标物体位移数据,目标物体位移数据相 对应的异常视频数据。
进一步的改进,所述异常视频数据即位移测量模块检测到异常帧 时,异常帧前后T秒的时间内视频数据即异常视频数据;所述异常帧, 即图片中目标物体的图像出现缺失、模糊、花屏以及前后相邻帧之间 目标物体出现超出预设的阈值的位移变化时图像对应的帧。
进一步的改进,参数预先设置模块具体实现步骤如下:
步骤一:启动前端位移测量设备;
步骤二:现场采集标定图像进行摄像机主体内部参数和外部参数标定, 并保存到相机标定配置文档;
步骤三:现场采集参考图像并保存到指定路径,在参考图像上画出物 体移动的区域,保存到位移测量计算配置文档;
步骤四:通过网络传输模块建立前端位移测量设备与后端服务器之间 的通信。
进一步的改进,所述摄像机主体的内部参数和外部参数标定是通 过张正友相机标定法,对摄像机主体的内部参数与外部参数进行标定, 得到摄像机主体内部参数和畸变参数矩阵,摄像机主体关于目标物体 所在平面的外部参数矩阵。
进一步的改进,所述位移测量模块具体实现步骤如下:
步骤一):启动前端位移测量设备;
步骤二):判断相机标定配置文档是否存在,相机标定配置文档存在 执行步骤三);否则,提示请预先进行相机标定,进入参数预先设置 模块;
步骤三):判断参考图像是否存在,参考图像存在执行步骤四);否则, 提示请预先采集参考图像,进入参数预先设置模块;
步骤四):判断位移测量计算配置文档是否存在,位移测量计算配置 文档存在执行步骤五;否则,提示请预先保存位移测量计算配置文档, 进入参数预先设置模块;
步骤五:将视频流解码成图像;
步骤六:通过计算参考图像与目标图像中目标物体图像的距离变化获 得目标物体的位移量;
步骤七:判断目标物体位移量是否小于最大位移阈值,是则将位移量 发送到后端服务器,否则将位移量和目标图像前后30s的视频发送到 后端服务器。
进一步的改进,所述摄像机主体包括摄像机外壳,摄像机外壳包 括外壳主体,外壳主体顶部赛有外壳上盖;外壳主体和外壳上盖之间 安装有摄像头,摄像头电连接有控制组件;所述控制组件包括控制盒, 控制盒内中部固定有控制板安装隔板,控制板安装隔板上安装有数据 传输模块和计算控制模块;控制盒顶部安装有直流电源模块、散热风 扇和接线端子排。
进一步的改进,所述数据传输模块和计算控制模块处于前端位移 测量设备上;所述前端位移测量设备为计算控制电路板;数据传输模 块为数据交换电路板。
本发明的优点:
本发明可以实现在摄像机前端集成实际应用的计算处理,在前 端就可以获取所需要的位移数据,然后在打包传输到后端服务器显示, 并且前端可以根据计算结果确定是否回传视频数据到后端服务器,这 样就可以节约数据传输的成本。
附图说明
图1为网络摄像机的的整体结构示意图;
图2为控制组件的结构示意图;
图3本发明一种具有物体位移测量计算功能的智能网络摄像机 电气图;
图4本发明一种具有物体位移测量计算功能的智能网络摄像机 实现位移测量计算和传输的框图;
图5本发明一种具有物体位移测量计算功能的智能网络摄像机 中核心控制板实现位移测量计算和传输的框图;
图6是本发明所述参数预先设置模块示意图;
图7是本发明所述前端位移测量设备位移测量计算模块示意图;。
其中,1摄像机外壳,1.1外壳主体,1.2外壳上盖,2控制组件, 2.1.1控制盒,2.1.2控制板安装隔板,2.1.3控制盒底板,2.2摄像 机数据采集板,2.3数据传输模块,2.4计算控制模块,2.5直流电 源模块,2.6散热风扇,2.7接线端子排,3摄像机。
具体实施方式
以下通过具体实施方式并且结合附图对本发明的技术方案作具 体说明。
如图1的一种具有物体位移测量计算功能的智能网络摄像机,摄 像机具有一个有主体和上盖组成的外壳,外壳内设置有控制组件、摄 像机。
工作流程如图3所示:
视觉检测网络相机电气系统主要有网络摄像机、计算控制电路板、 机罩控制板、数据交换电路板、电源模块等核心部件组成。
工作原理:交流电源AC24V作为输入供电,接到6位接线端子排 的1、2脚上,电源AC24V经过接线端子分线到网络相机输入电源端 子、机罩控制板输入电源端子;同时分线到电源模块的输入端,电源 模块将输入AC24V转换成DC5V输出,电源模块输出线接到接线端子 排的3、4脚上,电源DC5V经过接线端子分线到数据交换电路板输入 电源端、计算控制电路板的输入电源端。网络摄像机通过双绞线与机 罩控制板连接,用RS-485通信协议发送数据来控制机罩内的风扇的 开关、补光灯的开关、机罩镜头加热电阻的开关。计算控制电路板作 为采集数据计算中心,通过网络跳线与数据交换电路板连接,而数据 交换电路板通过网络跳线与网络摄像机连接,用以太网通信协议可以 计算控制电路板读取到网络摄像机的采集数据,并将运行数据再次通 过数据交换电路板的以太网接口,发送到用户PC应用端。
装置接线端子说明:
上述具有物体位移测量计算功能的智能网络摄像机是具有视频 采集、所拍摄物体运动位移测量计算、视频数据处理与传输功能的前 端位移测量设备。
如图1和2所示,具体包括主体和上盖组成的外壳,外壳内设置 有控制组件、摄像机。
如图5所示,一种具有物体位移测量计算功能的智能网络摄像机 实现物体位移测量计算的功能模块具体包括参数预先设置模块、视频 采集模块、位移测量计算模块和网络传输模块。
所述参数预先设置模块是首次安装前端位移测量设备时进行相 机标定、参考图像和物体移动区域的设置;
所述视频采集模块是启动摄像头对物体的移动状态进行图像数 据的采集;
所述位移测量模块是跟踪实时采集的目标图像中物体相对于参 考图像的位移,通过计算参考图像与目标图像中物体特征图像块的相 关性获取物体的位移量。
所述网络传输模块是通过通信协议建立前端位移测量设备与后 端服务器的连接,前端位移测量设备发送位移数据和异常视频数据, 后端服务器接收并存储位移数据和异常视频数据。
参数预先设置模块具体实现步骤:
步骤1:启动前端位移测量设备;
步骤2:现场采集标定图像进行相机内部参数和外部参数标定, 并保存到相机标定配置文档;
步骤3:现场采集参考图像并保存到指定路径。在参考图像上画 出物体移动的区域,保存到位移测量计算配置文档;
步骤4:通过网络传输模块建立前端位移测量设备与后端服务器 之间的通信。
所述相机的内部参数和外部参数标定是通过张正友相机标定法, 对相机的内部参数与外部参数进行标定,得到相机内部参数和畸变参 数矩阵,相机关于物体所在平面的外部参数矩阵;
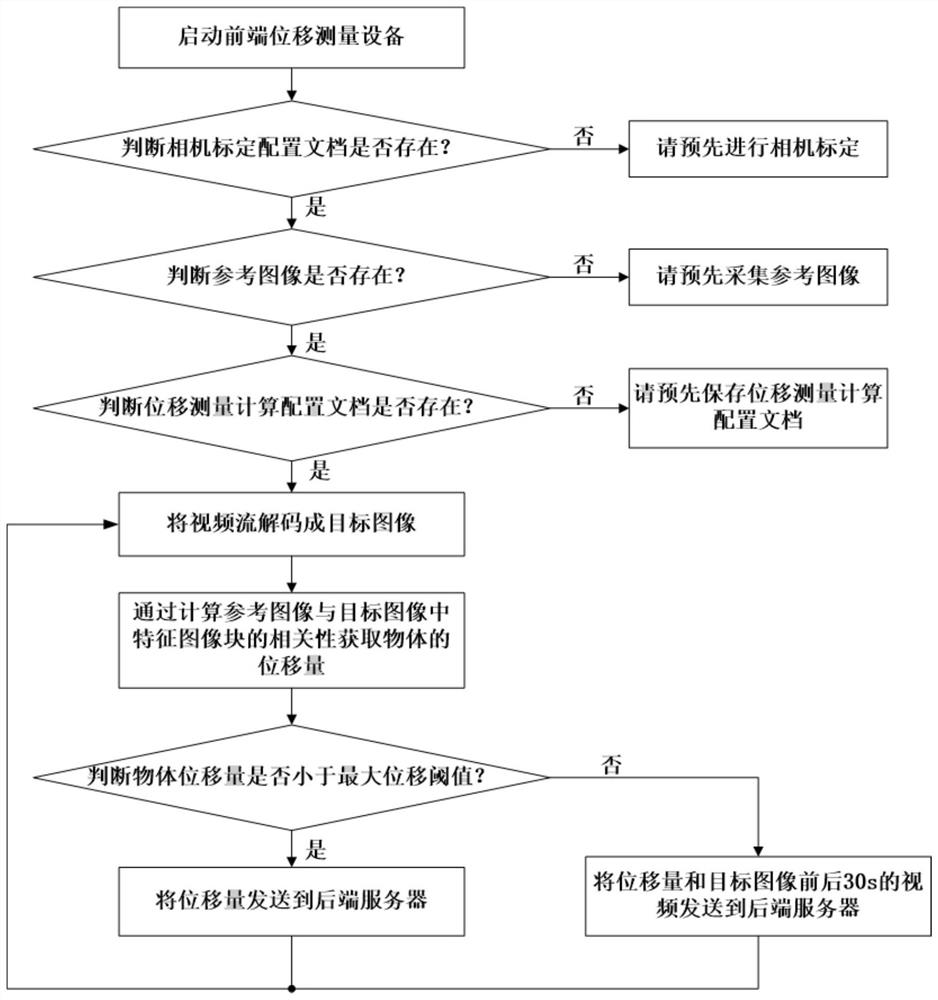
所述位移测量模块具体实现步骤:
步骤1:启动前端位移测量设备;
步骤2:判断相机标定配置文档是否存在,相机标定配置文档存 在执行步骤3;否则,提示请预先进行相机标定,进入参数预先设置 模块;
步骤3:判断参考图像是否存在,参考图像存在执行步骤4;否 则,提示请预先采集参考图像,进入参数预先设置模块;
步骤4:判断位移测量计算配置文档是否存在,位移测量计算配 置文档存在执行步骤5;否则,提示请预先保存位移测量计算配置文 档,进入参数预先设置模块;
步骤5:将视频流解码成目标图像;
步骤6:通过计算参考图像与目标图像中物体特征图像块的相关 性获取物体的位移量;
步骤7:判断物体位移量是否小于最大位移阈值,满足判断条件 将位移量发送到后端服务器,否则将位移量和目标图像前后30s的视 频发送到后端服务器。
如图4所示,包括:
前端位移测量设备,用于物体实时状态的视频采集和位移测量计 算,发送位移数据和异常视频数据;
移动通信网络,传输位移数据和异常视频数据;
后端服务器,存储位移数据和异常视频数据。
前端位移测量设备由工作人员根据被测物体的实际情况安装在 固定位置,物体的移动范围必须包括在摄像机的视野内,调整视角、 焦距和光照情况。首次安装前端位移测量设备需进行参数预先设置, 进行相机标定、参考图像和物体移动区域的设置。PC端远程连接前 端位移测量设备,工作人员在需进行位移测量计算的物体多角度多方 位移动棋盘格标定板,采集内参标定图像。标定板贴合需进行位移测 量计算的物体平面,采集内参标定图像。对采集的内部参数和外部参 数图像进行标定,得到相机内部参数和畸变参数矩阵,外部参数矩阵, 并保存到相机标定配置文档中。采集一张正常情况下的图像作为参考图像并保存到指定路径。在参考图像上画出物体移动的区域,保存到 位移测量计算配置文档;如果需要判断异常情况,还需设置最大位移 阈值和异常情况需存储视频的时间T,保存到位移测量计算配置文档;
前端位移测量设备通过移动网络,如3G网络或4G网络与后端服 务器连接。启动前端位移测量设备后,打开摄像机获取物体实时的位 移状况,位移测量模块会对实时采集的视频进行位移测量计算。首先 判断相机标定配置文档是否存在,相机标定配置文档不存在,提示请 预先进行相机标定,需人工介入进入参数预先设置模块,进行相机标 定;判断参考图像是否存在,参考图像不存在,提示请预先采集参考 图像,需人工介入进入参数预先设置模块,进行参考图像采集,并在 参考图像上画出物体移动的区域,保存到位移测量计算配置文档;判 断位移测量计算配置文档是否存在,位移测量计算配置文档不存在, 提示请预先保存位移测量计算配置文档,需人工介入进入参数预先设 置模块进行位移测量计算配置文档设置;相机标定配置文档、参考图 像和位移测量计算配置文档都存在的情况下,会进行物体位移的测量 计算,通过网络传输模块将位移数据传输到后端服务器。如果设置了 异常情况的判断,判断位移量是否大于最大位移阈值,满足条件,前 端位移测量设备将位移量和异常帧图像前后T秒的视频数据发送给 后端服务器。
本发明在移动前端设备就可以实现视频采集、所拍摄物体运动位 移测量计算、视频数据处理与传输的功能,通过4G网络就能将位移 数据和异常情况的视频数据传输给后端服务器,数据量很小。无需远 端计算机和整个视频数据的传输,大大节约了数据传输的成本。
在野外场景中由于网络摄像头的不稳定性、目标的性质(人为或 结构特征)和光照变化等异常情况的影响导致监测图像与参考图像差 异较大,导致出现异常视频,使得目标物体图像的整像素位移失效。 根据实际情况可将异常情况分为以下几种:1)由于网络或外界因素 影响,视频帧出现花屏、卡顿、监测区域被遮挡的情况,监测图像短 时间内异常,可恢复;2)人为或结构特征的影响导致刚体目标纹理 发生变化,参考图像与监测图像差异太大;3)日夜交替光照变化太 大,参考图像与监测图像差异太大;4)相机发生偏移,导致视场发 生变化,监测对象还在视场内;5)采集设备发生较大偏移,导致视 场发生变化,监测对象不在视场内。
为处理上述异常情况监测异常帧,本发明的处理方法如下:
采用Delaunay三角剖分算法对参考图像中基准区和监测区离散 的POI(兴趣点,图像处理设备自行选取)分别进行Delaunay三角剖 分处理,形成分布较为均匀的三角形网格。对于任意某一POI,当且 仅当只有唯一一个与之相应的二维Delaunay三角剖分,根据唯一性, 以参考图像内生成的各个Delaunay三角边作为约束验证FFT-CC输出 的整像素位移的有效性。校验FFT-CC输出的整像素位移的具体步骤 为:
步骤1、构建参考图像基准区(参考图像)和监测区(目标图像) POI点集的Delaunay三角网,保存构成Delaunay三角形的POI索引 和对应的Delaunay三角边;
步骤2、遍历基准区离散的POI构造的Delaunay三角形所有的 Delaunay三角边,获取Delaunay三角边对应的两个POI索引;
步骤3、通过POI索引查找监测图像中对应的两个POI的坐标,设两个 POI坐标分别为(x
步骤4、若FFT-CC计算的POI的整像素位移为有效值的数目大于阈值min_T, min_T为最小POI的整像素位移有效值数目,则计算步骤3中标记为有效值的 POI的整像素位移均值,并将均值赋值给标记为无效值的POI的整像素位移, 进入IC-GN计算POI的亚像素位移子模块;否则监测图像为无效帧。
上述仅为本发明的一个具体导向实施方式,但本发明的设计构思 并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属 于侵犯本发明的保护范围的行为。
- 一种具有物体位移测量计算功能的智能网络摄像机
- 一种可带电安装且具有驱鸟数量计算功能的智能驱鸟器