一种房车拖挂状态检测方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及电子信息技术领域,特别涉及一种房车拖挂状态检测方法。
背景技术
拖挂式房车是房车的一种,与自行式房车不同,拖挂式房车自身没有动力,需要额外的车辆来对其进行拖挂行驶。拖挂式房车根据外型、功能的不同可以分为不同的型号,其基本结构如图1所示。典型的拖挂式房车包括头车和尾车,头车是普通汽车如轿车、SUV等,而尾车是可以生活居住的厢体,头车和尾车由连接装置连接。头车的前面和后面都有车牌,尾车则只有后面挂有车牌。
当这类拖挂式房车停驻到房车营地或停车场时,有时是整体入场、出场,有时可能会把尾车留在营地而只有头车反复地出场、入场。然而,传统的车场道闸系统只是检测车头及其车牌号,并不能知道其后方是否有拖挂尾车,这给车场管理带来了难题。此外,在高速路收费站,对拖挂式房车也难以处理。
图2是现有道闸系统的检测原理示意图,当车辆到达道闸时,摄像头拍摄车牌并识别车牌号。因此,现有技术只能检测到一个车头是否到达道闸,而不能检测其后面是否有拖挂尾车。
发明内容
针对上述问题,本发明的目的在于提供一种房车拖挂状态检测方法,该方法能够检测判断当前车辆是只有头车还是带有拖挂尾车。
为解决上述技术问题,本发明的实施例提供如下方案:
一种房车拖挂状态检测方法,包括以下步骤:
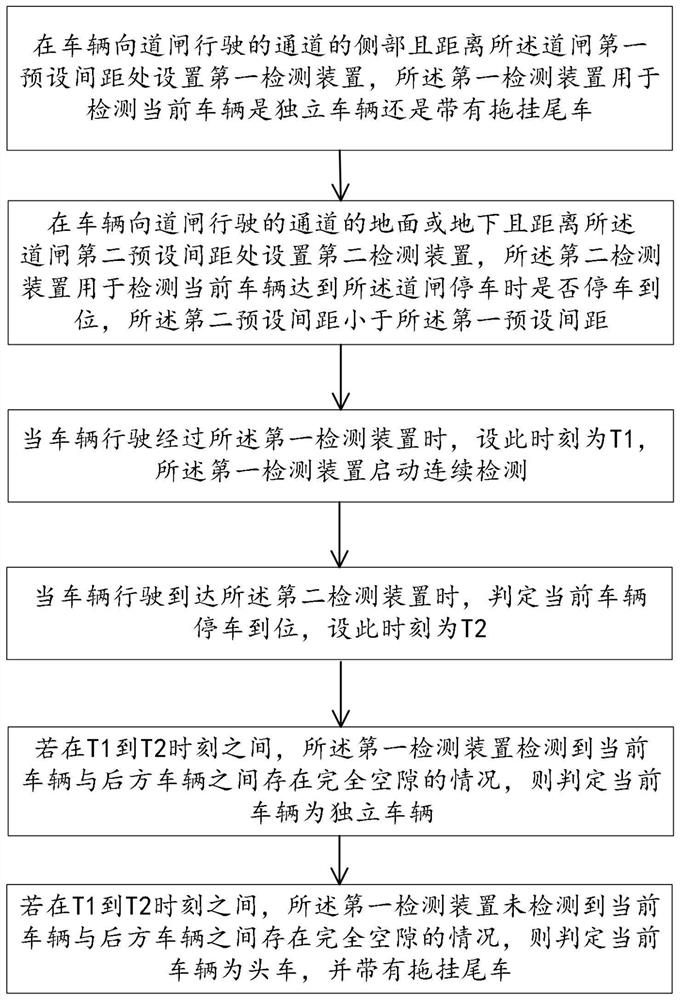
在车辆向道闸行驶的通道的侧部且距离所述道闸第一预设间距处设置第一检测装置,所述第一检测装置用于检测当前车辆是独立车辆还是带有拖挂尾车;
在车辆向道闸行驶的通道的地面或地下且距离所述道闸第二预设间距处设置第二检测装置,所述第二检测装置用于检测当前车辆达到所述道闸停车时是否停车到位,所述第二预设间距小于所述第一预设间距;
当车辆行驶经过所述第一检测装置时,设此时刻为T1,所述第一检测装置启动连续检测;
当车辆行驶到达所述第二检测装置时,判定当前车辆停车到位,设此时刻为T2;
若在T1到T2时刻之间,所述第一检测装置检测到当前车辆与后方车辆之间存在完全空隙的情况,则判定当前车辆为独立车辆;
若在T1到T2时刻之间,所述第一检测装置未检测到当前车辆与后方车辆之间存在完全空隙的情况,则判定当前车辆为头车,并带有拖挂尾车。
优选地,所述第一检测装置包括设置在车辆向道闸行驶的通道的一侧的摄像头,以及设置在车辆向道闸行驶的通道的另一侧的参照图板,所述摄像头与所述参照图板相对设置;当两者之间没有障碍物时,所述摄像头能够捕获所述参照图板的完整图像;当两者之间存在障碍物时,所述摄像头捕获的所述参照图板的图像不完整;
所述第二检测装置为地感线圈、激光探测器、毫米波雷达中的任意一种;
所述检测方法包括:
当所述第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间,所述摄像头连续捕获的所述参照图板的图像中是否存在显示完整的图像;
若所述摄像头连续捕获的所述参照图板的图像中存在显示完整的图像,则判定当前车辆为独立车辆,后面有空隙;
若所述摄像头连续捕获的所述参照图板的图像中不存在显示完整的图像,则判定当前车辆为头车,并带有拖挂尾车。
优选地,所述第一检测装置包括设置在车辆向道闸行驶的通道的一侧的红外发射装置,以及设置在车辆向道闸行驶的通道的另一侧的红外接收装置,所述红外发射装置与所述红外接收装置相对设置;当两者之间没有障碍物时,所述红外接收装置能够接收到所述红外发射装置发射的全部光线;当两者之间存在障碍物时,所述红外发射装置发射的部分光线被遮挡,所述红外接收装置只能接收到所述红外发射装置发射的部分光线;
所述第二检测装置为地感线圈、激光探测器、毫米波雷达中的任意一种;
所述检测方法包括:
当所述第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间,所述红外接收装置接收的光线是否存在完全未遮挡的情况;
若所述红外接收装置接收的光线存在完全未遮挡的情况,则判定当前车辆为独立车辆,后面有空隙;
若所述红外接收装置接收的光线不存在完全未遮挡的情况,则判定当前车辆为头车,并带有拖挂尾车。
优选地,所述第一检测装置包括设置在车辆向道闸行驶的通道的一侧的激光发射装置,以及设置在车辆向道闸行驶的通道的另一侧的激光接收装置,所述激光发射装置与所述激光接收装置相对设置;当两者之间没有障碍物时,所述激光接收装置能够接收到所述激光发射装置发射的激光;当两者之间存在障碍物时,所述激光发射装置发射的激光被遮挡,所述激光接收装置不能接收到所述激光发射装置发射的激光;
所述第二检测装置为地感线圈、激光探测器、毫米波雷达中的任意一种;
所述检测方法包括:
当所述第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间,所述激光接收装置是否存在能够接收到激光的情况;
若所述激光接收装置存在能够接收到激光的情况,则判定当前车辆为独立车辆,后面有空隙;
若所述激光接收装置不存在能够接收到激光的情况,则判定当前车辆为头车,并带有拖挂尾车。
优选地,所述第一检测装置设置在车辆向道闸行驶的通道的一侧,所述第一检测装置包括探测雷达,所述探测雷达的纵向探测范围至少覆盖距离地面30cm-60cm的高度范围,所述探测雷达为超声波雷达或毫米波雷达;
所述第二检测装置为地感线圈、激光探测器、毫米波雷达中的任意一种;
所述检测方法包括:
当所述第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间,所述探测雷达在其纵向探测范围内探测到的目标距离是否存在纵向均大于或等于通道宽度的情况;
若所述探测雷达在其纵向探测范围内探测到的目标距离存在纵向均大于或等于通道宽度的情况,则判定当前车辆为独立车辆,后面有空隙;
若所述探测雷达在其纵向探测范围内探测到的目标距离不存在纵向均大于或等于通道宽度的情况,则判定当前车辆为头车,并带有拖挂尾车。
优选地,所述第一检测装置设置在车辆向道闸行驶的通道的一侧,所述第一检测装置包括图像获取单元和图像分析单元,所述图像获取单元用于连续拍摄T1到T2时刻之间的图像,所述图像分析单元用于对拍摄的图像进行预处理、特征提取和特征识别,判断拍摄的图像中是否包含连接装置;
所述第二检测装置为地感线圈、激光探测器、毫米波雷达中的任意一种;
所述检测方法包括:
当所述第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间拍摄的图像中是否包含连接装置;
若所述图像分析单元识别出拍摄的图像中未包含连接装置,则判定当前车辆为独立车辆;
若所述图像分析单元识别出拍摄的图像中包含连接装置,则判定当前车辆为头车,并带有拖挂尾车。
优选地,所述图像分析单元对拍摄的图像进行预处理、特征提取和特征识别具体包括:
收集拖挂式房车的各类连接装置的样本,形成样本训练集;
基于深度学习卷积神经算法对所述样本训练集进行目标识别训练,得到连接装置识别模型;
对拍摄的图像进行降噪和归一化预处理;
对预处理后的图像进行特征提取;
将提取的特征输入所述连接装置识别模型,根据模型输出结果判定拍摄的图像中是否包含连接装置。
优选地,所述第一检测装置包括通信模块和预警模块;
所述通信模块将检测结果实时传输给停车场管理处或收费站管理处,以供所述停车场管理处或所述收费站管理处进行车辆进出登记;
所述预警模块包括语音播放器,当检测出当前车辆带有拖挂尾车时,所述预警模块进行语音播报,提示工作人员注意。
优选地,所述第二预设间距在1.5m-2m之间,所述第一预设间距大于8.3m。
优选地,所述第一检测装置距离地面的高度在30cm-60cm之间。
本发明实施例提供的技术方案带来的有益效果至少包括:
本发明实施例中,在车辆向道闸行驶的通道的侧部且距离道闸第一预设间距处设置第一检测装置,用于检测当前车辆是独立车辆还是带有拖挂尾车;在车辆向道闸行驶的通道的地面或地下且距离道闸第二预设间距处设置第二检测装置,用于检测当前车辆达到道闸停车时是否停车到位;当车辆行驶经过第一检测装置时,设此时刻为T1,第一检测装置启动连续检测;当车辆行驶到达第二检测装置时,判定当前车辆停车到位,设此时刻为T2;若在T1到T2时刻之间,所述第一检测装置检测到当前车辆与后方车辆之间存在完全空隙的情况,则判定当前车辆为独立车辆;若在T1到T2时刻之间,所述第一检测装置未检测到当前车辆与后方车辆之间存在完全空隙的情况,则判定当前车辆为头车,并带有拖挂尾车。这样,能够及时区分出当前车辆是只有头车,还是带有拖挂尾车,从而为停车场管理和高速路收费站管理带来便利。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是拖挂式房车的示意图;
图2是现有道闸系统的检测原理示意图;
图3是本发明实施例提供的一种房车拖挂状态检测方法的流程图;
图4是本发明实施例提供的房车拖挂状态检测方法的原理示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
房车营地的自动化管理或者高速路收费站的管理需要区分一辆车是否带有拖挂尾车,而现有的道闸系统无法做到。针对上述问题,本发明的实施例提供了一种房车拖挂状态检测方法,能够实时检测判别车辆是否带有拖挂尾车,区分出当前车辆是只有头车还是带有尾车。如图3所示,所述检测方法包括以下步骤:
在车辆向道闸行驶的通道的侧部且距离所述道闸第一预设间距处设置第一检测装置,所述第一检测装置用于检测当前车辆是独立车辆还是带有拖挂尾车;
在车辆向道闸行驶的通道的地面或地下且距离所述道闸第二预设间距处设置第二检测装置,所述第二检测装置用于检测当前车辆达到所述道闸停车时是否停车到位,所述第二预设间距小于所述第一预设间距;
当车辆行驶经过所述第一检测装置时,设此时刻为T1,所述第一检测装置启动连续检测;
当车辆行驶到达所述第二检测装置时,判定当前车辆停车到位,设此时刻为T2;
若在T1到T2时刻之间,所述第一检测装置检测到当前车辆与后方车辆之间存在完全空隙的情况,则判定当前车辆为独立车辆;
若在T1到T2时刻之间,所述第一检测装置未检测到当前车辆与后方车辆之间存在完全空隙的情况,则判定当前车辆为头车,并带有拖挂尾车。
根据调研,可做为房车头车的普通轿车或SUV,车身长度为4米到6米,拖挂式房车的头车与尾车之间的连接装置长度为1米到1.5米。在道闸进出口处,车辆到达道闸停车时与道闸的距离一般在1.5m-2m之间,如果两辆独立的普通车辆排队等待进出,为了避免追尾,则前后两辆车之间会保持一定间隙,记为L,一般L>30cm。
基于上述情况,在本发明的实施例中,所述第二检测装置与道闸之间的距离应在1.5m-2m之间,即所述第二预设间距在1.5m-2m之间;所述第一检测装置与道闸之间的距离应大于车身长度与所述第二预设间距之和,根据反复试验,本实施例中设置所述第一预设间距大于8.3m。这样,能够有效避免漏检、误检的情况发生,确保检测能够准确进行。
进一步地,本发明实施例中的连接装置包括但不限于各种形状的拖杆。考虑到连接装置一般离地40cm左右,因此所述第一检测装置距离地面的高度应在30cm-60cm之间,涵盖连接装置所在范围,以获得最佳检测精度。
本发明所述的检测方法可通过多种方式实现,以下实施例对本发明的优选实施方式进行了阐述,但不构成对本发明的限制,凡是能够实现本发明检测原理的具体实施方式均属于本发明的保护范围之内。
作为本发明的第一种具体实施方式,参考图4,所述第一检测装置包括设置在车辆向道闸行驶的通道的A侧的摄像头,以及设置在车辆向道闸行驶的通道的B侧的参照图板,摄像头与参照图板相对设置;当两者之间没有障碍物时,摄像头能够捕获参照图板的完整图像;当两者之间存在障碍物时,摄像头捕获的参照图板的图像不完整。
所述第二检测装置安装在C处,为地感线圈、激光探测器、毫米波雷达中的任意一种。
在本实施例中,所述检测方法包括:
当第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间,摄像头连续捕获的参照图板的图像中是否存在显示完整的图像;
若摄像头连续捕获的参照图板的图像中存在显示完整的图像,则判定当前车辆为独立车辆,后面有空隙;
若摄像头连续捕获的参照图板的图像中不存在显示完整的图像,则判定当前车辆为头车,并带有拖挂尾车。
作为本发明的第二种具体实施方式,参考图4,所述第一检测装置包括设置在车辆向道闸行驶的通道的A侧的红外发射装置,以及设置在车辆向道闸行驶的通道的B侧的红外接收装置,红外发射装置与红外接收装置相对设置;当两者之间没有障碍物时,红外接收装置能够接收到红外发射装置发射的全部光线;当两者之间存在障碍物时,红外发射装置发射的部分光线被遮挡,红外接收装置只能接收到红外发射装置发射的部分光线。
所述第二检测装置安装在C处,为地感线圈、激光探测器、毫米波雷达中的任意一种。
所述检测方法包括:
当第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间,红外接收装置接收的光线是否存在完全未遮挡的情况;
若红外接收装置接收的光线存在完全未遮挡的情况,则判定当前车辆为独立车辆,后面有空隙;
若红外接收装置接收的光线不存在完全未遮挡的情况,则判定当前车辆为头车,并带有拖挂尾车。
本实施例中,红外发射装置发射出的相邻两条光线的间隔应小于连接装置在纵向截面的高度,以避免发生漏检。根据调研,考虑到头车与尾车之间的连接强度和稳固性,连接装置在纵向截面的高度通常不低于2cm。因此红外发射装置发射出的光线中,相邻两条光线的间隔优选小于2cm。
作为本发明的第三种具体实施方式,参考图4,所述第一检测装置包括设置在车辆向道闸行驶的通道的A侧的激光发射装置,以及设置在车辆向道闸行驶的通道的B侧的激光接收装置,激光发射装置与激光接收装置相对设置;当两者之间没有障碍物时,激光接收装置能够接收到激光发射装置发射的激光;当两者之间存在障碍物时,激光发射装置发射的激光被遮挡,激光接收装置不能接收到激光发射装置发射的激光。
所述第二检测装置安装在C处,为地感线圈、激光探测器、毫米波雷达中的任意一种。
所述检测方法包括:
当第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间,激光接收装置是否存在能够接收到激光的情况;
若激光接收装置存在能够接收到激光的情况,则判定当前车辆为独立车辆,后面有空隙;
若激光接收装置不存在能够接收到激光的情况,则判定当前车辆为头车,并带有拖挂尾车。
作为本发明的第四种具体实施方式,参考图4,所述第一检测装置设置在车辆向道闸行驶的通道的A侧或者B侧,所述第一检测装置包括探测雷达,所述探测雷达的纵向探测范围至少覆盖距离地面30cm-60cm的高度范围,所述探测雷达为超声波雷达或毫米波雷达。
所述第二检测装置安装在C处,为地感线圈、激光探测器、毫米波雷达中的任意一种。
所述检测方法包括:
当第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间,探测雷达在其纵向探测范围内探测到的目标距离是否存在纵向均大于或等于通道宽度的情况;
若探测雷达在其纵向探测范围内探测到的目标距离存在纵向均大于或等于通道宽度的情况,则判定当前车辆为独立车辆,后面有空隙;
若探测雷达在其纵向探测范围内探测到的目标距离不存在纵向均大于或等于通道宽度的情况,则判定当前车辆为头车,并带有拖挂尾车。
上述实施例中,以通道宽度作为判断标准进行了说明。实际操作中,连接装置一般安装在车辆中间位置,因此,也可以将判断标准设置为大于通道宽度的50%,例如设置为通道宽度的70%等,此处不再赘述。
作为本发明的第五种具体实施方式,参考图4,所述第一检测装置设置在车辆向道闸行驶的通道的A侧或者B侧,包括图像获取单元和图像分析单元,图像获取单元用于连续拍摄T1到T2时刻之间的图像,图像分析单元用于对拍摄的图像进行预处理、特征提取和特征识别,判断拍摄的图像中是否包含连接装置。
所述第二检测装置安装在C处,为地感线圈、激光探测器、毫米波雷达中的任意一种。
所述检测方法包括:
当第二检测装置检测到当前车辆停车到位后,判断在T1到T2时刻之间拍摄的图像中是否包含连接装置;
若图像分析单元识别出拍摄的图像中未包含连接装置,则判定当前车辆为独立车辆;
若图像分析单元识别出拍摄的图像中包含连接装置,则判定当前车辆为头车,并带有拖挂尾车。
进一步地,图像分析单元对拍摄的图像进行预处理、特征提取和特征识别具体包括:
收集拖挂式房车的各类连接装置的样本,形成样本训练集;
基于深度学习卷积神经算法对所述样本训练集进行目标识别训练,得到连接装置识别模型;
对于拍摄的图像进行降噪和归一化预处理;
对预处理后的图像进行特征提取;
将提取的特征输入所述连接装置识别模型,根据模型输出结果判定拍摄的图像中是否包含连接装置。
进一步地,在上述各实施例中,所述第一检测装置还包括通信模块和预警模块;
通信模块将检测结果实时传输给停车场管理处或收费站管理处,以供停车场管理处或收费站管理处进行车辆进出登记;
预警模块包括语音播放器,当检测出当前车辆带有拖挂尾车时,预警模块进行语音播报,提示工作人员注意。
本发明提供的房车拖挂状态检测方法采用动态检测过程,能够应对各种可能出现的情况,包括:头车很长,带尾车;头车很长,无尾车;头车很短,带尾车;头车很短,无尾车,但有其它车辆紧随上来等。其中最后一种情况比较难处理,但本发明方法仍然可以正确处理,这也是本发明的优势之一。
综上所述,本发明通过设置第一检测装置和第二检测装置,首先从靠近道闸处判断当前车辆是否停车到位,然后从侧面检测当前车辆后面是否有连接装置,从而判断当前车辆是否带有拖挂尾车,检测过程为动态实时检测,即使后面有别的车辆跟随上来,也能快速区分判别,具有较高的检测精度,应用于房车营地停车场或高速路收费站等处,能够有效提高管理效率。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。