选煤厂重介系统加介装置
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及选煤厂重介系统加介技术领域,具体而言,涉及一种选煤厂重介系统加介装置。
背景技术
现阶段的国内选煤厂,在向重介系统添加配置好的浓介质(以下简称加介)的方式如下:
(1)人工手动加介模式:调度人员根据现场实际情况确定需要加介后,通知加介人员进行加介作业,加介人员接到通知后开始配比浓介质,配好浓介质后启动加介设备开始加介。
其客观缺点为:①加介过程粗放,加介数据记录在纸上易丢失损坏。②工人劳动强度较大,工作效率低下。
(2)使用喷水与斜坡搭配的加介模式:控制装置确定喷水机构当前朝向的目标堆放区域是否存在介质堆;若存在,则控制喷水机构朝向当前介质堆喷水,以使目标介质沿支撑斜坡滑入到介质坑内。
其客观缺点为:①依旧需要工人对其进行介质的堆放,并没有解放人工。②使用水喷射堆放区这一过程误差较大,可能勿喷其他地区。
(3)使用行车搭配抓斗的自动加介模式:抓斗跟随行车抓取介质放入储料仓,当储料仓内的介质达到设定值时,抓斗停止工作,储料仓中的介质从出料口卸落到输送机上,输送机将介质输送到泵池中,控制装置启动电动阀门使清水管向泵池中流入清水,风管向泵池中吹风,通过输送泵向外输送混合后的介质。
其客观缺点为:①由于行车的行动轨迹固定,导致介质的堆放位置固定不够灵活。②使用抓斗抓取介质,每次抓取都的量都是一抓斗的固定值,对加介量的把控不够精确。③使用抓斗抓取介质,总会有一定的介质留到最后无法抓取,造成浪费。
发明内容
本发明的主要目的在于提供一种选煤厂重介系统加介装置,以解决现有技术中的选煤厂重介系统的加介装置所需的人工强度较大的问题。
为了实现上述目的,本发明提供了一种选煤厂重介系统加介装置,选煤厂重介系统加介装置设置在介质库中,选煤厂重介系统加介装置包括:支撑底座,支撑底座安装在介质库的墙壁上;机械臂,机械臂的一端与介质库的墙壁的固定连接,机械臂的至少部分可活动地设置;空气输送管道,空气输送管道的入口固定在机械臂的自由端,以随机械臂移动;真空组件,真空组件设置在介质库的底部且真空组件的入口与空气输送管道的出口连通;混料桶,混料桶设置在介质库的底部,真空组件的出口与混料桶的入口连通。
进一步地,选煤厂重介系统加介装置包括支撑底座,支撑底座安装在介质库的墙壁上,机械臂的固定端与支撑底座连接。
进一步地,选煤厂重介系统加介装置包括激光雷达和控制电脑,激光雷达设置在介质库的顶部,激光雷达与控制电脑连接,以用于扫描整个介质库,并将检测结果传递给控制电脑。
进一步地,选煤厂重介系统加介装置包括摄像头,摄像头设置在机械臂的自由端,用于采集机械臂的自由端前方的图像信息。
进一步地,控制电脑设置在介质库中的控制柜内。
进一步地,控制电脑与真空组件连接,以控制真空组件的工作状态。
进一步地,控制电脑与摄像头连接,以用于接收摄像头所采集的图像信息。
进一步地,空气输送管道内部设置有耐磨涂层。
进一步地,真空组件的出口与混料桶的入口之间通过连接管路连通。
进一步地,空气输送管道绑缚在机械臂上。
应用本发明的技术方案,本发明的选煤厂重介系统加介装置设置在介质库中,选煤厂重介系统加介装置包括:支撑底座,支撑底座安装在介质库的墙壁上;机械臂,机械臂的一端与介质库的墙壁的固定连接,机械臂的至少部分可活动地设置;空气输送管道,空气输送管道的入口固定在机械臂的自由端,以随机械臂移动;真空组件,真空组件设置在介质库的底部且真空组件的入口与空气输送管道的出口连通;混料桶,混料桶设置在介质库的底部,真空组件的出口与混料桶的入口连通。这样,本发明的选煤厂重介系统加介装置能够自动完成加介过程,降低了工人的劳动强度,由于机械臂的自由度更高,介质堆的摆放位置可以更加地灵活,且通过使用真空组件能够使空气输送管道负压吸取介质,使加介过程更加连续,对加介量的把控更加精准,不容易出现因介质残留而造成浪费,解决了现有技术中的选煤厂重介系统的加介装置所需的加介时间长,人工强度较大,且工作效率低的问题。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
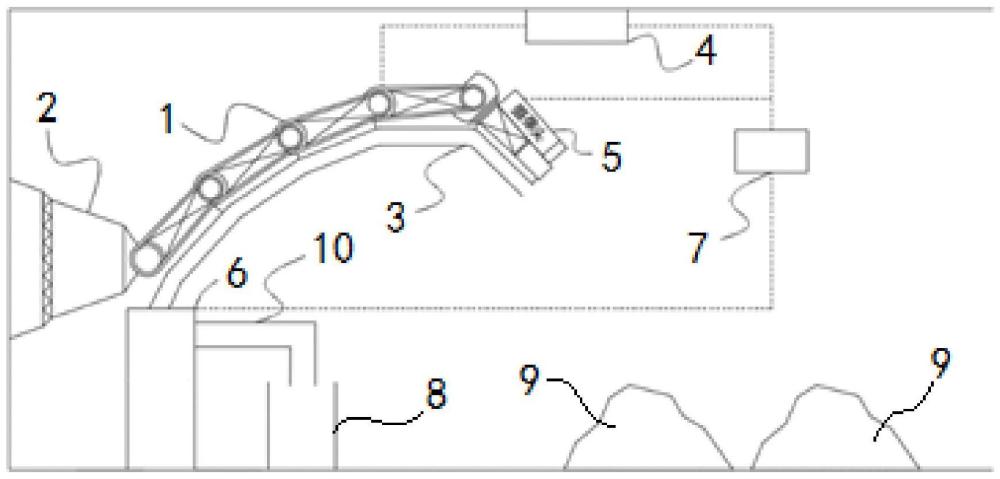
图1示出了根据本发明的选煤厂重介系统加介装置的实施例的结构示意图。
其中,上述附图包括以下附图标记:
1、机械臂;2、支撑底座;3、空气输送管道;4、激光雷达;5、摄像头;6、真空组件;7、控制电脑;8、混料桶;9、介质堆;10、连接管路。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
如图1所示,本发明提供了一种选煤厂重介系统加介装置,选煤厂重介系统加介装置设置在介质库中,选煤厂重介系统加介装置包括:支撑底座2,支撑底座2安装在介质库的墙壁上;机械臂1,机械臂1的一端与介质库的墙壁的固定连接,机械臂1的至少部分可活动地设置;空气输送管道3,空气输送管道3的入口固定在机械臂1的自由端,以随机械臂1移动;真空组件6,真空组件6设置在介质库的底部且真空组件6的入口与空气输送管道3的出口连通;混料桶8,混料桶8设置在介质库的底部,真空组件6的出口与混料桶8的入口连通。
这样,本发明的选煤厂重介系统加介装置能够自动完成加介过程,降低了工人的劳动强度,由于机械臂1的自由度更高,介质堆9的摆放位置可以更加地灵活,且通过使用真空组件6能够使空气输送管道3负压吸取介质,使加介过程更加连续,对加介量的把控更加精准,不容易出现因介质残留而造成浪费,解决了现有技术中的选煤厂重介系统的加介装置所需的加介时间长,人工强度较大,且工作效率低的问题。
具体地,重介选煤技术又称重介质选煤技术,是现在选煤行业中重要的矿物质分选技术,该技术采用重液或重悬浮液作为介质来实现煤炭的按密度分选。
如图1所示,选煤厂重介系统加介装置包括支撑底座2,支撑底座2安装在介质库的墙壁上,机械臂1的固定端与支撑底座2连接。
如图1所示,选煤厂重介系统加介装置包括激光雷达4和控制电脑7,激光雷达4设置在介质库的顶部,激光雷达4与控制电脑7连接,以用于扫描整个介质库,并将检测结果传递给控制电脑7。
如图1所示,选煤厂重介系统加介装置包括摄像头5,摄像头5设置在机械臂1的自由端,用于采集机械臂1的自由端前方的图像信息。
如图1所示,控制电脑7设置在介质库中的控制柜内。
如图1所示,控制电脑7与真空组件6连接,以控制真空组件6的工作状态。
如图1所示,控制电脑7与摄像头5连接,以用于接收摄像头5所采集的图像信息。
优选地,空气输送管道3内部设置有耐磨涂层。
如图1所示,真空组件6的出口与混料桶8的入口之间通过连接管路10连通。
具体地,空气输送管道3绑缚在机械臂1上。
本发明的选煤厂重介系统加介装置的工作工程如下:
(1)介质库的中心顶部的激光雷达4扫描整个介质库,对整个介质库进行建模,获取介质堆9的位置信息,并将扫描数据与控制电脑7进行实时交互。
(2)控制电脑7控制机械臂1移动,以将空气输送管道3的入口对准需要移动的介质堆9,真空组件6开始工作使得空气输送管道3内部产生真空,以吸取介质堆9的介质,介质依次经过空气输送管道3、真空组件6和连接管路10进入混料桶8中。
(3)控制电脑7比对初始建模信息和当前建模信息,当发现介质库中的介质堆9已被吸取完毕时,控制真空组件6停止工作。
本发明的选煤厂重介系统加介装置的优点具体如下:
(1)不同于人工手动加介,①整个加介过程无需人员参与,减少了相关人员的工作强度,增加了工作效率;②只需工人将介质放在介质库中,其余操作均由控制电脑7完成即可,达到了减人提效的目的;③加介过程的数据均储存在控制电脑7的数据库中,告别了人工加介过程较为粗放和数据记录在纸张上容易遗失的缺点。
(2)不同于喷水与斜坡加介,①本发明的选煤厂重介系统加介装置的激光雷达4能够在加介前构造介质库的模型,并确定介质堆9的位置信息,从而实时将初始建模信息和当前建模信息进行比对,以判断是否完成作业;②喷水与斜坡加介是采用喷水的方式将介质冲下斜坡,这种方式不稳定性较高,采用水作为运输介质不易控制力度,而本发明的选煤厂重介系统加介装置则不会存在这些问题;③喷水与斜坡加介时需要配合斜坡冲水,改变地形,而本发明的选煤厂重介系统加介装置无需改变地形,只需在介质库的一侧墙壁上安装机械臂1即可。
(3)不同于行车搭配抓斗加介,①行车搭配抓斗加介时介质库中存放的多为磁铁矿粉,为颗粒状,需使用抓斗抓取,介质易发生散落,而本发明的选煤厂重介系统加介装置利用负压吸取介质,不易发生介质散落;②在介质库加装行车和抓斗对介质库的高度有要求,并且改装难度较大,而本发明的选煤厂重介系统加介装置只需在介质库一面墙壁安装机械臂1;③使用抓斗时对于每次抓取的量不能精确控制,而本发明的选煤厂重介系统加介装置可通过控制电脑7控制真空组件6的工作来进行调整每次吸取的介质的量;④本发明的选煤厂重介系统加介装置在加介过程中不会使得介质残留,可实现无死角吸取介质。
从以上的描述中,可以看出,本发明上述的实施例实现了如下技术效果:
本发明的选煤厂重介系统加介装置设置在介质库中,选煤厂重介系统加介装置包括:支撑底座2,支撑底座2安装在介质库的墙壁上;机械臂1,机械臂1的一端与介质库的墙壁的固定连接,机械臂1的至少部分可活动地设置;空气输送管道3,空气输送管道3的入口固定在机械臂1的自由端,以随机械臂1移动;真空组件6,真空组件6设置在介质库的底部且真空组件6的入口与空气输送管道3的出口连通;混料桶8,混料桶8设置在介质库的底部,真空组件6的出口与混料桶8的入口连通。这样,本发明的选煤厂重介系统加介装置能够自动完成加介过程,降低了工人的劳动强度,由于机械臂1的自由度更高,介质堆9的摆放位置可以更加地灵活,且通过使用真空组件6能够使空气输送管道3负压吸取介质,使加介过程更加连续,对加介量的把控更加精准,不容易出现因介质残留而造成浪费,解决了现有技术中的选煤厂重介系统的加介装置所需的加介时间长,人工强度较大,且工作效率低的问题。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本申请的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
在本申请的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本申请保护范围的限制。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。