输送装置和手术机器人系统
文献发布时间:2024-01-17 01:15:20
技术领域
本发明涉及医疗器械技术领域,具体而言涉及一种输送装置和手术机器人系统。
背景技术
心脑血管介入手术是由医生手动将导管、导丝等器械通过血管送入病患体内来完成治疗的过程。手术过程中,医生会一直遭受电离辐射,还会因过长时间手术带来操作精度下降问题,借助机器人技术能够有效降低放射线对介入医生的伤害,同时可以大幅提高手术操作的稳定性,降低术中事故的发生几率。因此,心脑血管介入手术辅助机器人逐渐成为当今各科技强国在医疗机器人领域的重点研发对象。
在介入手术中,会涉及导丝和/或导管的前进、后退及旋转动作,采用不同的机械机构能够实现导丝和/或导管的上述动作。然而目前的血管介入手术机器人导丝和/或导管输送机构依然存在几个方面的问题:(1)结构复杂臃肿,不易安装;(2)电机内置于输送端,不易进行无菌隔离;(3)导丝和/或导管输送多使用滚轮或皮带轮,夹紧部位面积过少,导致导丝和/或导管输送过程易出现打滑。
为此,本发明提供了一种输送装置和手术机器人系统,以至少部分地解决现有技术中的问题。
发明内容
在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
为了至少部分地解决上述问题,根据本发明的第一方面,公开了一种输送装置,其包括:
驱动组件;
从动组件,所述从动组件连接至所述驱动组件,并且包括压轮;
限位组件,所述限位组件与所述压轮间隔开设置;以及
夹紧组件,所述夹紧组件能够在夹紧所述导丝和/或导管的夹紧位置和释放所述导丝和/或导管的释放位置之间切换,所述夹紧组件包括第一夹紧件、第二夹紧件和至少一个弹性件,所述第一夹紧件和所述第二夹紧件相对地设置,并且被可活动地限位在所述限位组件之间,所述至少一个弹性件设置在所述第一夹紧件和所述第二夹紧件之间,并且能够对所述第一夹紧件和所述第二夹紧件施加远离彼此的弹性力,
其中,所述驱动组件能够驱动所述压轮旋转,使得所述压轮能够压紧或者释放所述夹紧组件,
当所述压轮压紧所述夹紧组件时,所述夹紧组件位于所述夹紧位置,所述压轮卡持至所述第一夹紧件和所述第二夹紧件中的至少一者的外表面,使得所述第一夹紧件和所述第二夹紧件彼此靠近而夹紧所述导丝和/或导管,
当所述压轮释放所述夹紧组件时,所述夹紧组件位于所述释放位置,所述压轮与所述第一夹紧件和所述第二夹紧件脱离接触,使得所述第一夹紧件和所述第二夹紧件在所述弹性件的作用下彼此远离而释放所述导丝和/或导管。
根据本发明的输送装置,通过设置驱动组件、从动组件、限位组件和夹紧组件,驱动组件能够驱动从动组件的压轮旋转,使得压轮能够压紧或者释放夹紧组件,进而第一夹紧件和第二夹紧件能够夹紧或者释放导丝和/或导管,以实现稳定地输送导丝和/或导管,输送装置的结构简单,能够实现小型化和轻量化,降低生产成本。
可选地,所述弹性件为压缩弹簧、弹簧片、弹性硅胶管、扭簧和回弹垫片中的至少一种。
可选地,所述限位组件包括第一限位件和与所述第一限位件连接的第二限位件,所述第一夹紧件和所述第二夹紧件被可活动地限位在所述第一限位件和所述第二限位件之间,并且所述第一夹紧件和所述第二夹紧件均部分地从所述第一限位件和所述第二限位件露出。
可选地,所述第一夹紧件设置有贯穿所述第一夹紧件的整个长度的第一容纳槽,所述第二夹紧件对应地设置有贯穿所述第二夹紧件的整个长度的第二容纳槽,所述导丝和/或导管被夹设在所述第一容纳槽和所述第二容纳槽之间。
可选地,所述第一容纳槽为朝向所述第二夹紧件设置的半圆形或者U形凹槽,所述第二容纳槽为朝向所述第一夹紧件设置的半圆形或者U形凹槽。
可选地,所述夹紧组件还包括第一柔性件和第二柔性件,所述第一柔性件沿着所述第一容纳槽的整个长度设置于所述第一容纳槽,所述第二柔性件沿着所述第二容纳槽的整个长度设置于所述第二容纳槽,所述导丝和/或导管被夹设在所述第一柔性件和所述第二柔性件之间。
可选地,所述夹紧组件还包括至少一个定位件,所述定位件连接至所述第一夹紧件和所述第二夹紧件中的一者,并且所述第一夹紧件和所述第二夹紧件中的另一者对应地设置有至少一个定位孔,所述定位件沿所述定位孔的长度方向可移动地插入所述定位孔,所述弹性件对应地套设在所述定位件的外周侧。
可选地,所述压轮设置有压紧面,所述第一夹紧件设置有第一配合面,所述第二夹紧件设置有第二配合面,在所述压轮压紧所述夹紧组件的状态下,所述压紧面能够卡持至所述第一配合面和所述第二配合面中的至少一者,使得所述第一夹紧件和所述第二夹紧件彼此靠近而夹紧所述导丝和/或导管。
可选地,所述压紧面、所述第一配合面和所述第二配合面均构造为弧形面,在所述压轮压紧所述夹紧组件的状态下,所述压紧面与所述第一配合面和所述第二配合面中的至少一者之间为非面接触。
根据本发明的第二方面,公开了一种手术机器人系统,其包括根据上述第一方面中任一项所述的输送装置。
附图说明
本发明的下列附图在此作为本发明的一部分用于理解本发明。附图中示出了本发明的实施例及其描述,用来解释本发明的原理。
附图中:
图1为根据本发明的一个优选实施方式的手术机器人系统的输送装置的剖视示意图;以及
图2为图1中的输送装置的局部结构的立体示意图;
图3为图1中的输送装置的局部结构的立体分解示意图;
图4为图1中的输送装置的夹紧组件的立体示意图;
图5为图4中的夹紧组件的一个变型实施方式的立体示意图;
图6为图5中的夹紧组件的局部结构的剖视示意图;
图7为图1中的输送装置的另一个剖视示意图;
图8为图1中的输送装置的局部结构的另一个剖视示意图;
图9为图1中的输送装置的从动组件的压轮的立体示意图;
图10为图7中的输送装置的一个变型实施方式的剖视示意图。
附图标记说明:
10:导丝 100:输送装置
110:基座 120:滑轨
131:限位组件 132:驱动轴
133:驱动齿轮 134:可动件
135:第一齿条 136:第二齿条
137:第一限位件 138:第二限位件
141:第一从动组件 142:第二从动组件
143:第三从动组件 144:第四从动组件
145:第一从动轴 146:第一从动齿轮
147:第一不完全齿轮 148:第二从动轴
149:第二从动齿轮 151:第二不完全齿轮
152:第三从动轴 153:第三从动齿轮
154:第四从动轴 155:第四从动齿轮
156:压轮 157:压紧面
160:夹紧组件 161:第一夹紧件
162:第二夹紧件 163:弹性件
168:定位件 164:第一柔性件
165:第二柔性件 166:第一容纳槽
167:第二容纳槽 169:定位孔
171:第一配合面 172:第二配合面
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本发明实施方式可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明实施方式发生混淆,对于本领域公知的一些技术特征未进行描述。
为了彻底了解本发明实施方式,将在下列的描述中提出详细的结构。显然,本发明实施方式的施行并不限定于本领域的技术人员所熟习的特殊细节。需要说明的是,本发明中所引用的诸如“第一”和“第二”的序数词仅仅是标识,而不具有任何其他含义,例如特定的顺序等。而且,例如,术语“第一部件”其本身不暗示“第二部件”的存在,术语“第二部件”本身不暗示“第一部件”的存在。本发明中所使用的术语“上”、“下”、“前”、“后”、“左”、“右”以及类似的表述只是为了说明的目的,并非限制。
本发明提供了一种输送装置100和具有其的手术机器人系统。根据本发明的手术机器人系统可以用于介入手术(例如,心脑血管介入手术),以能够将导丝、导管等器械通过血管送入病患体内来完成治疗的过程。
如图1和图2所示,输送装置100主要包括基座110、滑轨120、驱动组件、从动组件、限位组件131和夹紧组件160。根据本实施方式的输送装置100可以单独地输送导丝或者导管,或者同时输送导丝和导管(导管套设在导丝的外侧),图1至图3和图8中示例性地示出了导丝10。
如图1和图2所示,滑轨120构造为长条形,并且连接至基座110,图1和图2中仅示出了基座110的部分结构。优选地,滑轨120沿水平方向设置。可以理解,根据需要,滑轨120沿竖直方向设置,或者沿与水平方向成任意角度设置。驱动组件和从动组件均设置于基座110,驱动组件连接至从动组件,以用于驱动从动组件。从动组件包括压轮156,限位组件131与压轮156间隔开设置(参见图2),两者始终不接触。夹紧组件160能够在夹紧导丝和/或导管的夹紧位置和释放导丝和/或导管的释放位置之间切换。
如图1至图4所示,夹紧组件160包括第一夹紧件161、第二夹紧件162和至少一个弹性件163,第一夹紧件161和第二夹紧件162相对地设置,并且被可活动地限位在限位组件160之间。该至少一个弹性件163设置在第一夹紧件161和第二夹紧件162之间,并且能够对第一夹紧件161和第二夹紧件162施加远离彼此的弹性力。
在本实施方式中,第一夹紧件161和第二夹紧件162中的一者能够相对于第一夹紧件161和第二夹紧件162中的另一者沿与滑轨120的长度方向垂直的方向移动。具体地,位于夹紧位置的第一夹紧件161和第二夹紧件162之间的距离小于位于释放位置的第一夹紧件161和第二夹紧件162之间的距离,使得位于夹紧位置的第一夹紧件161和第二夹紧件162能够夹紧导丝和/或导管,并且位于释放位置的第一夹紧件161和第二夹紧件162能够释放导丝和/或导管。
弹性件为压缩弹簧、弹簧片、弹性硅胶管、扭簧和回弹垫片中的至少一种。在本实施方式中,弹性件163为螺旋压缩弹簧。图4中示例性地示出了四个弹性件163。当弹性件163的数量为多个时,多个弹性件163可以均布地设置在第一夹紧件161和第二夹紧件162之间,使得第一夹紧件161和第二夹紧件162受到的弹性力较为均匀,使得导丝和/或导管受到的夹紧力较为合适,从而使得导管和/或导管输送顺畅且不会出现压伤的现象。
在本实施方式中,驱动组件能够驱动压轮156旋转,使得压轮156能够压紧或者释放夹紧组件160。当压轮156压紧夹紧组件160时,夹紧组件160位于夹紧位置,压轮156卡持至第一夹紧件161和第二夹紧件162中的至少一者的外表面,使得第一夹紧件161和第二夹紧件162彼此靠近而夹紧导丝和/或导管。当压轮156释放夹紧组件160时,夹紧组件160位于释放位置,压轮156与第一夹紧件161和第二夹紧件162脱离接触,使得第一夹紧件161和第二夹紧件162在弹性件163的作用下彼此远离而释放导丝和/或导管。由此,根据本发明的输送装置100,能够实现稳定地输送导丝和/或导管,输送装置100的结构简单,能够实现小型化和轻量化,降低生产成本。
如图2至图3和图7所示,限位组件131主要包括第一限位件137和与第一限位件137连接的第二限位件138。例如,第二限位件138可以通过紧固件连接至第一限位件137。第一夹紧件161和第二夹紧件162相对地设置,并且在与滑轨120的长度方向垂直的方向被可活动地限位在第一限位件137和第二限位件138之间。第一夹紧件161和第二夹紧件162均部分地从第一限位件137和第二限位件138露出,以便于压轮156卡持在第一夹紧件161和第二夹紧件162的外表面。
如图1至图4所示,第一夹紧件161和第二夹紧件162均构造为半圆柱形,两者相对地设置,以能够共同形成圆柱形结构。图1至图3中的夹紧组件160位于夹紧位置,即第一夹紧件161和第二夹紧件162位于夹紧位置,在压轮156施加的压力的作用下,第一夹紧件161和第二夹紧件162相互抵靠,以夹紧导丝和/或导管。当夹紧组件160位于释放位置时,即第一夹紧件161和第二夹紧件162位于释放位置时,压轮156与夹紧组件160(具体地指第一夹紧件161和第二夹紧件162)脱离接触,在弹性件163施加的弹性力的作用下,第一夹紧件161和第二夹紧件162脱离接触以间隔开一段距离,从而释放导丝和/或导管。
如图4所示,第一夹紧件161设置有沿滑轨120的长度方向延伸的第一容纳槽(图4中未示出),第一容纳槽贯穿第一夹紧件161的整个长度。第二夹紧件162对应地设置有沿滑轨120的长度方向延伸的第二容纳槽167,第二容纳槽167贯穿第二夹紧件162的整个长度。第一容纳槽和第二容纳槽167均构造为截面为半圆形的凹槽。导丝和/或导管沿滑轨120的长度方向被夹设在第一容纳槽和第二容纳槽167之间。由此,导丝和/或导管与第一夹紧件161和第二夹紧件162之间的接触面积较大,在导丝和/或导管输送的过程中不易出现打滑的现象。
在一个变型的实施方式中,如图5和图6所示,夹紧组件160还包括第一柔性件164和第二柔性件165,第一柔性件164沿着第一容纳槽166的整个长度设置于第一容纳槽166,第二柔性件165沿着第二容纳槽167的整个长度设置于第二容纳槽167,导丝和/或导管沿滑轨120的长度方向被夹设在第一柔性件164和第二柔性件165之间。具体地,第一容纳槽166和第二容纳槽167均构造为截面为U形的凹槽,并且第一容纳槽166和第二容纳槽167的开口相对地设置。第一柔性件164和第二柔性件165均构造为与第一容纳槽166和第二容纳槽167的形状相适应的长条状结构。第一柔性件164和第二柔性件165可以由诸如硅胶或者橡胶的柔性材料制成。优选地,第一柔性件164和第二柔性件165由医用硅胶材料制成。由此,能够进一步地增大导丝和/或导管与第一夹紧件161和第二夹紧件162之间的接触面积,进一步降低导丝和/或导管输送的过程中出现打滑的可能性。
如图4所示,夹紧组件160还包括至少一个定位件168,定位件168连接至第二夹紧件162,并且第一夹紧件161对应地设置有至少一个定位孔(图4中未示出,参见图5和图6中的定位孔169),定位件168沿定位孔的长度方向可移动地插入定位孔。弹性件163对应地套设在定位件168的外周侧,并且弹性件163的两端分别抵靠至第一夹紧件161和第二夹紧件162,使得第一夹紧件161和第二夹紧件162能够沿着定位孔的长度方向相对地移动,即第一夹紧件161和第二夹紧件162中的一者能够相对于另一者沿定位孔的长度方向移动。
在本实施方式中,在本实施方式中,第二夹紧件162连接至第一限位件137,使得第一夹紧件161在弹性件163的弹性力的作用下能够沿着定位孔的长度方向相对于第二夹紧件162移动。夹紧组件160包括多个定位件168,定位孔和弹性件163的数量与定位件168的数量相同。在一个未示出的实施方式中,定位件连接至第一夹紧件,并且第二夹紧件对应地设置有至少一个定位孔。
如图2至图4、图7和图9所示,压轮156设置有压紧面157,第一夹紧件161设置有第一配合面171,第二夹紧件162设置有第二配合面172,在压轮156压紧夹紧组件160的状态下,压紧面157能够卡持至第一配合面171和第二配合面172中的至少一者,使得第一夹紧件161和第二夹紧件162彼此靠近而夹紧导丝和/或导管。压紧面157、第一配合面171和第二配合面172均构造为弧形面。优选地,在压轮156压紧夹紧组件160的状态下,压紧面157与第一配合面171和第二配合面172中的至少一者之间为非面接触,以能够减小导丝和/或导管旋转时受到的摩擦力。
在本实施方式中,如图7所示,在压轮156压紧夹紧组件160的状态下,压紧面157能够卡持至第一配合面171和第二配合面172中的至少一者,并且压紧面157与第一配合面171和第二配合面172中的至少一者为线接触。
在一个变型的实施方式中,如图10所示,在压轮156压紧夹紧组件160的状态下,压紧面157能够卡持至第一配合面171和第二配合面172中的至少一者,并且压紧面157与第一配合面171和第二配合面172中的至少一者为点接触,以能够进一步减小导丝和/或导管旋转时受到的摩擦力。
如图1和图2所示,驱动组件包括驱动电机(未示出)、与驱动电机连接的驱动轴132以及设置在驱动轴132上的驱动齿轮133。驱动电机设置于基座110,并且设置在基座110的下方。驱动电机能够驱动驱动轴132旋转,以带动驱动齿轮133同步旋转。优选地,驱动轴132垂直于滑轨120的长度方向,即驱动轴132沿竖直方向设置。
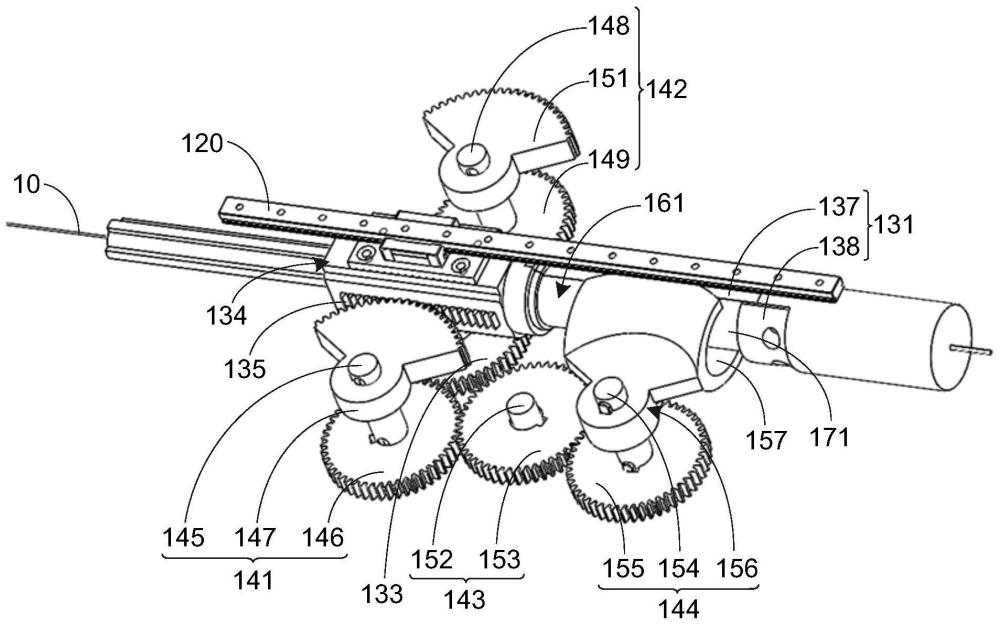
从动组件主要包括可动件134、第一从动组件141、第二从动组件142、第三从动组件143以及第四从动组件144。
可动件134沿滑轨120的长度方向可移动地连接至滑轨120。在本实施方式中,可动件134沿滑轨120的长度方向设置,即沿水平方向设置。可动件134设置在夹紧组件160的一端,驱动齿轮133沿水平方向设置在可动件134的正下方,并且与可动件134间隔开设置。第一限位件137和第二限位件138中的至少一者连接至可动件134。在本实施方式中,第一限位件137连接至可动件134,第二限位件138连接至第一限位件137。例如,第二限位件138可以通过紧固件连接至第一限位件137。
第一从动组件141和第二从动组件142相对地设置在可动件134的两侧,并且可动件134的两侧对应地设置有第一齿条135和第二齿条136。第一齿条135和第二齿条136均构造为沿滑轨120的长度方向延伸(即沿水平方向延伸)的直齿条,并且第一齿条135和第二齿条136的尺寸相同。第一从动组件141用于与驱动齿轮133和第一齿条135啮合,第二从动组件142用于与驱动齿轮133和第二齿条136啮合,使得可动件134能够沿滑轨120的长度方向做循环往复运动,以带动夹紧组件160沿滑轨120的长度方向做循环往复运动。
在夹紧组件160沿与滑轨120的长度方向平行的第一方向移动的过程中,压轮156能够压紧夹紧组件160,使得夹紧组件160位于夹紧位置而沿第一方向输送导丝和/或导管。在夹紧组件160沿与第一方向相反的第二方向移动的过程中,压轮156能够释放夹紧组件160,使得夹紧组件160位于释放位置而释放导丝和/或导管。
第一从动组件141包括第一从动轴145、第一从动齿轮146和第一不完全齿轮147。第一从动轴145平行于驱动轴132,并且与驱动轴132间隔开设置。第一从动齿轮146和第一不完全齿轮147均设置在第一从动轴145上,以与第一从动轴145同步旋转。具体地,第一不完全齿轮147大致构造为扇形结构,并且其齿仅设置在扇形的圆弧面上。第一从动齿轮146和第一不完全齿轮147均沿水平方向设置,并且第一从动齿轮146设置在第一不完全齿轮147的下方。第一从动齿轮146与驱动齿轮133啮合,第一不完全齿轮147与第一齿条135啮合。因此,驱动齿轮133的旋转能够带动第一从动齿轮146旋转,第一从动齿轮146能够经由第一从动轴145带动第一不完全齿轮147旋转。在本实施方式中,第一从动齿轮146和驱动齿轮133的尺寸相同,使得第一从动齿轮146和驱动齿轮133同步旋转且旋转方向相反。
第二从动组件142包括第二从动轴148、第二从动齿轮149和第二不完全齿轮151。第二从动轴148平行于驱动轴132,并且与驱动轴132间隔开设置。第二从动齿轮149和第二不完全齿轮151均设置在第二从动轴148上,以与第二从动轴148同步旋转。具体地,第二不完全齿轮151大致构造为扇形结构,并且其齿仅设置在扇形的圆弧面上。第二从动齿轮149和第二不完全齿轮151均沿水平方向设置,并且第二从动齿轮149设置在第二不完全齿轮151的下方。第二从动齿轮149与驱动齿轮133啮合,第二不完全齿轮151与第二齿条136啮合。因此,驱动齿轮133的旋转能够带动第二从动齿轮149旋转,第二从动齿轮149能够经由第二从动轴148带动第二不完全齿轮151旋转。在本实施方式中,第二从动齿轮149和驱动齿轮133的尺寸相同,使得第二从动齿轮149和驱动齿轮133同步旋转且旋转方向相反。
如图2所示,第一从动轴145和第二从动轴148相对地设置在可动件134的两侧,使得第一从动齿轮146和第二从动齿轮149相对地设置在可动件134的两侧,并且第一从动齿轮146和第二从动齿轮149相对地设置在驱动齿轮133的两侧,第一不完全齿轮147和第二不完全齿轮151相对地设置在可动件134的两侧。第一从动齿轮146和第二从动齿轮149的尺寸相同,使得第一从动齿轮146和第二从动齿轮149同步旋转且旋转方向一致。第一不完全齿轮147和第二不完全齿轮151的尺寸相同,并且第二不完全齿轮151和第一不完全齿轮147的初始安装方位一致,使得第一不完全齿轮147和第二不完全齿轮151同步旋转且旋转方向一致。
在本实施方式中,第一不完全齿轮147与第一齿条135之间的啮合和第二不完全齿轮151与第二齿条136之间的啮合不同时进行。具体地,第一不完全齿轮147与第一齿条135之间啮合的同时,第二不完全齿轮151与第二齿条136之间的脱离啮合,并且第二不完全齿轮151与第二齿条136之间的啮合的同时,第一不完全齿轮147与第一齿条135之间脱离啮合。因此,当第一不完全齿轮147与第一齿条135之间啮合时,能够使得可动件134沿第一方向和第二方向中的一者移动,当第二不完全齿轮151与第二齿条136之间的啮合时,能够使得可动件134沿第一方向和第二方向中的另一者移动。
第三从动组件143包括第三从动轴152和第三从动齿轮153。第三从动轴152平行于驱动轴132,并且与驱动轴132间隔开设置。第三从动齿轮153沿水平方向设置在第三从动轴152上,以与第三从动轴152同步旋转。第三从动齿轮153与第一从动齿轮146啮合,因此第一从动齿轮146的旋转能够带动第三从动齿轮153旋转。在本实施方式中,第三从动齿轮153和第一从动齿轮146的尺寸相同,使得第三从动齿轮153和第一从动齿轮146同步旋转且旋转方向相反。
第四从动组件144还包括第四从动轴154、第四从动齿轮155和压轮156。第四从动轴154平行于驱动轴132,并且与驱动轴132间隔开设置。第四从动齿轮155和压轮156均设置在第四从动轴154上,以与第四从动轴154同步旋转。第四从动齿轮155和压轮156均沿水平方向设置,并且第四从动齿轮155设置在压轮156的下方。第四从动齿轮155与第三从动齿轮153啮合,因此第三从动齿轮153能够带动第四从动齿轮155旋转。在本实施方式中,第四从动齿轮155和第三从动齿轮153的尺寸相同,使得第四从动齿轮155和第三从动齿轮153同步旋转且旋转方向相反。
在本实施方式中,第一从动齿轮146和第四从动齿轮155相对地设置在第三从动齿轮153的两侧,并且第一从动齿轮146、第四从动齿轮155和第三从动齿轮153的尺寸相同,使得第四从动齿轮155和第一从动齿轮146同步旋转且旋转方向相同。因此,压轮156和第一不完全齿轮147同步旋转且旋转方向一致,并且在第一不完全齿轮147与第一齿条135啮合的同时压轮156能够压紧夹紧组件160,使得夹紧组件160位于夹紧位置而沿第一方向输送导丝和/或导管。在第二不完全齿轮151与第二齿条136啮合的同时压轮156能够释放夹紧组件160,使得夹紧组件160位于释放位置而释放导丝和/或导管。
根据本发明的输送装置,通过设置驱动组件、从动组件、限位组件和夹紧组件,驱动组件能够驱动从动组件的压轮旋转,使得压轮能够压紧或者释放夹紧组件,进而第一夹紧件和第二夹紧件能够夹紧或者释放导丝和/或导管,以实现稳定地输送导丝和/或导管,输送装置的结构简单,能够实现小型化和轻量化,降低生产成本。
除非另有定义,本文中所使用的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。本文中出现的诸如“设置”等术语既可以表示一个部件直接附接至另一个部件,也可以表示一个部件通过中间件附接至另一个部件。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
本发明已经通过上述实施方式进行了说明,但应当理解的是,上述实施方式只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施方式范围内。本领域技术人员可以理解的是,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。