一种履带式行走轮及具有其的机器人底盘
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及机器人技术领域,更具体的说是涉及一种履带式行走轮及具有其的机器人底盘。
背景技术
传统的巡检机器人,在马道场景下不能很好的完成相关的巡检任务,通常情况下,巡检机器人按驱动方式分为轮式和履带式(特殊的轨道式由于与本方向差异过大不做讨论);马道巡检对机器人越障性能及尺寸要求严格,需满足越障高度200mm时,车长不得超过750mm,转弯半径不得超过250mm,且车高不得超过600mm以确保机器人在马道局促的空间内能正常运行,目前传统结构的巡检机器人其主要越障方式是通过动力和自身车长和车高所带来的中心优势进行障碍翻越,经过理论计算若采用传统设计越过200mm障碍时,车长若为750mm,重心高度(重心其他位置位于几何中心)不得超过95mm,这使得底盘无法布局,相应的若加高重心则车场必须超过750mm,而排爆机器人使用的履带肢摇臂又因结构复杂,成本过高不利于产品化。
因此,如何提供一种结构简单,提高巡检工作效率,降低人工成本的同时,增加越障能力,能够满足巡检需求的机器人底盘,是本领域技术人员亟需解决的问题。
发明内容
有鉴于此,本发明提供了一种履带式行走轮,旨在解决上述技术问题。
为了实现上述目的,本发明采用如下技术方案:
一种履带式行走轮,包括:
主体支撑架;所述主体支撑架两端安装有行走轮组;
平衡式悬挂构件;所述平衡式悬挂构件包括平衡杆和平衡臂;所述平衡杆垂直固定在所述主体支撑架中部底面,所述平衡臂为V型结构,并通过转轴与所述平衡杆底部铰接;所述平衡臂两端安装有支重轮;
弹性件;所述弹性件固定在所述平衡杆和所述平衡臂之间;
履带;所述履带套设在所述行走轮组和所述支重轮外侧。
通过上述技术方案,本发明提供的一种履带式行走轮中,平衡臂为V型结构,并与平衡杆铰接,能够实现整个履带式行走轮在平面内±90°的摆动,在平衡杆和平衡臂之间固定的弹性件,能够为支重轮提供预压力,在平时行走时由于自身重力的原因,可平稳行驶;同时行走轮组的轮心要高于障碍物,能够提供有效的越障接触角,当控制主体支撑架进行摆动时,由于重力的不平衡分配,平衡臂会按预设的弹性件的回弹力作用下向前摆动,动力可以提供有效的攀爬力,提高越障能力。
优选的,在上述一种履带式行走轮中,所述弹性件为扭簧;所述扭簧环形圈的中孔套设在所述转轴外侧,且所述扭簧的扭臂通过固定器分别固定在所述平衡杆和所述平衡臂两侧的臂杆上。扭簧的设置能够为平衡臂提供预压力,能够使支重轮在越障时更好的进入预设的支撑位置,提高越障能力。
优选的,在上述一种履带式行走轮中,所述扭簧的数量至少为一对,一对所述扭簧对称固定在所述平衡杆和所述平衡臂两侧的臂杆上。扭簧的数量可依据设备本身的重量进行增减。
优选的,在上述一种履带式行走轮中,所述行走轮组包括驱动轮和导向轮。
优选的,在上述一种履带式行走轮中,所述主体支撑架的两侧分别固定有升降导杆机构;两个所述升降导杆机构上均安装有张紧轮。
本发明还提供了一种机器人底盘,包括车体,以及安装在所述车体上的履带式行走轮和监测系统;
所述车体内部集成有动力模块和控制模块;所述动力模块为所述行走轮组和所述主体支撑架提供动力;所述控制模块用于控制所述主体支撑架的摆动角度;
所述监测系统用于监测外界环境并将监测信息反馈至所述控制模块。
通过上述技术方案,本发明提供的一种机器人底盘中,动力模块为行走轮组和主体支撑架提供动力,履带式行走轮为车体提供支撑和行走的传动,能够实现在不同地形上的行走,同时通过使用能够摆臂的平衡式悬挂构件,能够有效的改变机器人在越障时的重心位置,结合弹簧预力平衡式悬挂,能够使支重轮在越障时能够更好的进入预设的支撑位置;控制模块能够依据监测系统反馈的监测信息,对主体支撑架的角度进行调整,能够在满足小尺寸机器人的前提下,极大地提高了机器人的越障能力;本发明结构简单,便于控制,同时能够提升巡检工作效率,降低人工成本,能够满足不同的巡检需求,使用范围广泛,便于推广。
优选的,在上述一种机器人底盘中,所述履带式行走轮的数量为四个,四个所述履带式行走轮两两对称的安装在所述车体的两侧。共四条履带的行走系统,每个履带式行走轮均具有驱动能力,能够在±90°的范围内实现摆臂。
优选的,在上述一种机器人底盘中,所述监测系统包括监测云台和激光雷达。监测云台能够对外界环境进行图像采集,激光雷达提供定位导航服务,并且具有障碍物高度检测功能,辅助机器人对履带行走轮的角度进行控制。
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种履带式行走轮及具有其的机器人底盘,具有以下有益效果:
1、本发明通过主体支撑架的摆动使得整个履带式行走轮实现平面内±90°的摆动,使用能够摆臂的履带有效的改变机器人在越障时的重心位置,通过至少一对扭簧的对称布置,能够为支重轮提供预压力,能够使支重轮在越障时能够更好的进入预设的支撑位置,从而保证在小尺寸下,极大地提高机器人的越障能力。
2、本发明通过监测云台的设置,能够对外界环境进行图像采集,激光雷达的设置能够提供定位导航服务,并且具有障碍物高度检测功能,辅助机器人对履带行走轮的角度进行控制。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
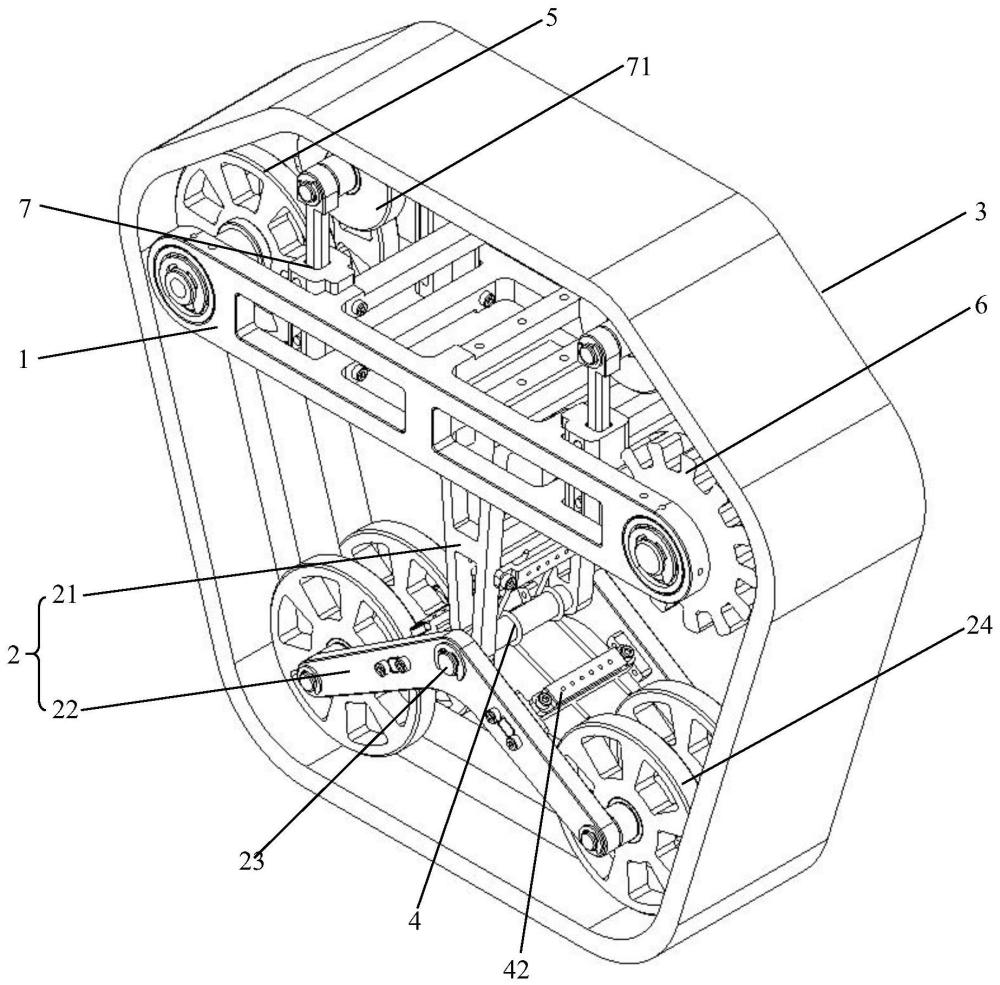
图1附图为本发明提供的履带式行走轮的结构示意图;
图2附图为本发明提供的扭簧与平衡杆和平衡臂的结构示意图;
图3附图为本发明提供的平衡杆和平衡臂的结构示意图;
图4附图为本发明提供的机器人底盘的结构示意图;
图5附图为本发明提供的机器人底盘平稳行走的结构示意图;
图6附图为本发明提供的机器人底盘越障(平衡臂上安装扭簧)的结构示意图;
图7附图为本发明提供的机器人底盘越障(平衡臂上未安装扭簧)的结构示意图;
图8附图为本发明提供的机器人底盘越障攀爬中的结构示意图。
其中:
1-主体支撑架;
2-平衡式悬挂构件;
21-平衡杆;22-平衡臂;23-转轴;24-支重轮;
3-履带;
4-扭簧;
41-扭臂;42-固定器;421-扭簧支撑架;422-扭簧固定夹;
5-驱动轮;
6-导向轮;
7-升降导杆机构;
71-张紧轮;72-固定座;73-导杆;
8-车体;
9-监测系统;
91-监测云台;92-激光雷达。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
参见附图1至附图3,本发明实施例公开了一种履带式行走轮,包括:
主体支撑架1;主体支撑架1两端安装有行走轮组;
平衡式悬挂构件2;平衡式悬挂构件2包括平衡杆21和平衡臂22;平衡杆21垂直固定在主体支撑架1中部底面,平衡臂22为V型结构,并通过转轴23与平衡杆21底部铰接;平衡臂22两端安装有支重轮24;
弹性件;弹性件固定在平衡杆21和平衡臂22之间;
履带3;履带3套设在行走轮组和支重轮24外侧。
为了进一步优化上述技术方案,弹性件为扭簧4;扭簧4环形圈的中孔套设在转轴23外侧,且扭簧4的扭臂41通过固定器42分别固定在平衡杆21和平衡臂22两侧的臂杆上。
为了进一步优化上述技术方案,固定器42包括扭簧支撑架421和扭簧固定夹422;扭簧支撑架421固定在平衡臂22两侧的臂杆或平衡杆21上,扭臂41置于扭簧支撑架421上,扭簧固定夹422通过螺钉将扭臂41和扭簧支撑架421夹紧固定。
为了进一步优化上述技术方案,扭簧4的数量至少为一对,一对扭簧4对称固定在平衡杆21和平衡臂22两侧的臂杆上。
为了进一步优化上述技术方案,行走轮组包括驱动轮5和导向轮6。
为了进一步优化上述技术方案,主体支撑架1的两侧分别固定有升降导杆机构7;两个升降导杆机构7上均安装有张紧轮71。
为了进一步优化上述技术方案,每个升降导杆机构7均包括固定座72和导杆73;固定座72固定在主体支撑架1上,且固定座72内部开设有滑槽;导杆73的一端可滑动连接在所述滑槽内,另一端安装有张紧轮71。为避免长时间使用而造成履带3的松弛,可通过对导杆73在滑槽内高度的调节,实现张紧轮71的高度调节,进而可调节履带3的张紧度。
实施例2:
参加附图4-附图8,本发明实施例公开了一种机器人底盘,包括车体8,以及安装在车体8上的履带式行走轮和监测系统9;
车体8内部集成有动力模块和控制模块;动力模块为行走轮组和主体支撑架1提供动力;控制模块用于控制主体支撑架1的摆动角度;
监测系统9用于监测外界环境并将监测信息反馈至控制模块,控制模块依据反馈的信息实现对主体支撑架1的角度调整。
为了进一步优化上述技术方案,履带式行走轮的数量为四个,四个履带式行走轮两两对称的安装在车体8的两侧。
为了进一步优化上述技术方案,监测系统9包括监测云台91和激光雷达92。
具体的:
参见附图5,履带式行走轮可在主体支撑架1的摆动下实现在平面内±90°的摆动,平衡臂22两个臂杆上的扭簧4提供预压力,在平时行走时由于自身重力的原因,可平稳行驶;导向轮6和驱动轮5的轮心高于障碍物,能够为机器人提供有效的越障接触角,当机器人控制主体支撑架1摆动时,由于重力的不平衡分配,平衡臂22会按预设的扭簧4回弹方向进行动作。
参见附图6,平衡臂22在扭簧4的回弹力作用下向前摆动,此时支重轮24与平衡臂22及履带3在障碍物处形成锐角的越障接近角,动力可以提供有效的攀爬力,使机器人能够越过障碍。
参见附图7,平衡臂22在没有扭簧4的回弹力作用,在机器人向前推力的作用下平衡臂22向后自然摆动,此时支重轮24与平衡臂22及履带3在障碍物处形成钝角的越障接近角,动力会几乎垂直的作用于障碍物竖直面上,对障碍物的攀爬形成阻挡,导致机器人不能越过障碍。
附图6和附图7的对比,说明了预压平衡式悬挂构件2相对于传统平衡式悬挂拥有明显的优势。
参见附图8,为机器人攀爬中的一个位置,此时机器人通过调节前后履带式行走轮的角度,同时平衡臂22在扭簧4的作用下进入预设支撑位置,使整个机器人的中心作用位置在障碍物边沿内侧,因此使机器人的整体倾覆力矩与翻越障碍方向相同,若采用传统布局,同尺寸同重心位置的情况下,重心始终作用于障碍物边沿外侧,因此使机器人的整体倾覆力矩与翻越障碍的方向相反,导致机器人倾覆无法翻越障碍。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。