控制包括电机的涡轮机的方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及一种飞行器涡轮机,具体地,涉及涡轮机的控制以便根据飞行器飞行员操纵杆的位置提供期望的推力。
背景技术
参考图1,其示出了呈双轴涡轮风扇类型的涡轮机100。已知地,涡轮机100沿气流方向从上游向下游包括风扇110、低压压缩机111、高压压缩机112、设有燃料流量设定值WF
涡轮机100的设计需要考虑足够的余量以避免所谓的泵送现象。由气流对一个压缩机中的叶片的过度冲击引起的此泵送现象会导致相关压缩机下游压力的大量快速波动,并可能导致燃烧室113熄火。这还进一步使压缩机叶片产生剧烈震动,从而导致机械损坏。因此,防止这种现象发生是尤为重要的。工作中的压缩机的运行通常以图表的方式呈现,该图表根据流经压缩机的气流来呈现获得的出口与入口之间的压力比;此图表将压缩机的转速进一步参数化。此图示出了泵送管路,该泵送管路形成压缩比的最大极限,以避免出现泵送的风险。已知地,当涡轮机100稳定运行时,定义出被称为操作管路的管路,该管路将与通过流率获得的压缩比相关。此操作管路的位置由涡轮机100设计者自行决定,且此操作管路至泵送管路的距离代表泵送余量。应当注意,作为第一近似值,压缩机的效率(供应给空气的压缩功相对驱动其旋转所提供的功)在接近泵送管路时会更高。相反,飞行员为了增加推力从稳定操作(瞬态阶段)请求的加速,通过发生在泵送管路方向上的操作点偏移来反映在压缩机处。
实际上,向燃烧室113中额外增加燃料将导致压缩比几乎瞬间升高,而发动机旋转速度由于惯性却没有时间增加。通过所添加燃料的燃烧供应给流体的焓变导致每一涡轮机提供的功增加,从而导致对应主体的旋转速度增加。当发动机速度再次稳定时,可通过将操作点返回至操作管路上,且返回后操作点比先前位置的流率更高,这些变化反映在压缩机图上。
因此,涡轮机100的设计者必须尝试通过将操作管路放置得尽可能高的方式来优化其位置,以便与泵送管路保持足够距离以实现安全加速的同时为其压缩机提供更高效率。
为了避免任何泵送现象,涡轮机100包括由电子单元执行的调节系统。参考图2,调节系统包括稳定管理模块31、瞬态意图检测模块32、发动机转速轨迹生成模块33、选择模块34、整合模块35以及停止管理模块36。
稳定管理模块31根据涡轮机100的发动机速度NL与设定发动机速度NL
设定发动机速度NL
瞬态意图检测模块32的目的是检测飞行员期望的瞬态意图。瞬态意图检测模块32确定涡轮机100的发动机速度NL与设定发动机速度NL
在加速请求的情况下,如果发动机速度差大于预定阈值S2(NL
在加速请求的情况下,发动机速度轨迹生成模块33确定用于加速的发动机速度设定值(加速轨迹)。类似地,在减速的情况下,发动机速度轨迹生成模块33确定用于减速的发动机速度设定值(减速轨迹)。依据生成的轨迹,发动机速度轨迹生成模块33将校正变量提供给选择模块34。
该发动机速度轨迹生成模块33对于本领域所属技术人员来说是已知的,具体地通过专利申请US2013/0008171和专利申请FR2977638A1可知,在此不再赘述。
在此示例中,当选择模块34从瞬态意图检测模块32接收激活信号时,选择模块34在未接收到激活信号的情况下从稳定管理模块31选择校正变量,并在接收到激活信号的情况下从发动机速度轨迹生成模块33选择连接变量。该选择模块34对于本领域技术人员是已知的并不再详细呈现。所选择的校正变量被提供给整合模块35。整合模块35通过对所选择的校正变量进行整合来确定燃料流量设定值WF
停止管理模块36限制由整合模块35确定的燃料流量设定值WF
发动机速度轨迹生成模块33和停止管理模块36使得可以定义出加速轨迹,该加速轨迹能够限制燃料流量设定值WF
该调节系统是有效的,但无法控制涡轮机出口处的气体温度(称为“废气温度”的EGT温度)以使其不超过极限温度EGTmax。
为了消除此缺陷,直接的解决方案是提供一种专用于涡轮机出口处气体温度的独立调节方法,但该方法在性能(延迟、误差等)方面存在许多缺陷。
发明内容
本发明涉及一种用于控制涡轮机的方法,所述涡轮机包括位于气体发生器上游并界定出主气流和次气流的风扇,所述气体发生器被所述主气流穿过并包括低压压缩机、高压压缩机、燃烧室、高压涡轮机和低压涡轮机,所述低压涡轮机通过低压旋转轴连接至所述低压压缩机,所述高压涡轮机通过高压旋转轴连接至所述高压压缩机,所述涡轮机包括电机,所述电机将扭矩传递给高压旋转轴,所述燃烧室中的燃料流量设定值和供应给所述电机的扭矩设定值已确定,所述控制方法包括以下步骤:
–根据涡轮机出口气体温度参数和所述涡轮机出口气体温度参数的最大值来确定温度校正变量;
–根据所述温度校正变量确定扭矩校正变量;和
–依据所述扭矩校正变量确定所述扭矩设定值。
由于增加了电机的扭矩,使得在显著降低废气温度的同时保持最佳性能。因此,所述电机使得可以避免降低推力性能从而保持足够的温度余量。
优选地,所述控制方法包括:
–执行第一燃料调节环路以确定所述燃料流量设定值的步骤,该步骤包括以下步骤:
–根据当前发动机速度与确定的发动机速度设定值之间的差来检测发动机速度瞬态意图;
–确定瞬态发动机速度设定值;
–根据所述瞬态发动机速度设定值来确定燃料校正变量;和
–根据所述燃料校正变量确定所述燃料流量设定值;
–执行第二扭矩调节环路以便确定所述扭矩设定值的步骤,该步骤包括
–根据所述瞬态发动机速度设定值和所述温度校正变量来确定扭矩校正变量。
本发明,能够在保持余量以使涡轮机避免受泵送或熄火的同时调节出口气体的温度。所述检测发动机转速瞬态意图的步骤对应于推力瞬态意图。这样,所述涡轮机的当前发动机速度可反应性地遵循轨迹设定值。因此所述涡轮机的可操作性得以提高。有利地,所述确定温度校正变量的步骤使得可以使用所述电机来降低涡轮机出口处的气体温度。因此,温度调节直接集成于所述确定扭矩校正变量的步骤中。
优选地,在所述确定扭矩校正变量的步骤中,在加速的情况下,在所述温度校正变量和根据所述加速瞬态速度设定值确定的加速校正变量之间选择两者中的最大值。换句话说,在导致温度升高的加速期间,选择最大校正变量以便在降低出口气体的温度的同时获得期望的加速。因此,温度调节完全集成于整体调节中,从而保证最佳性能。
在此示例中,在驱动扭矩控制的正向约定和制动扭矩控制的负向控制的情况下选择最大校正变量。相反,在驱动扭矩控制的负向约定和制动扭矩控制的正向控制的情况下选择最小校正变量。
有利地,所述第二扭矩调节环路不是替代所述第一燃料调节环路而是在达到操作极限时支持第一燃料调节环路。因此所述发动机转速调节的基本原理不会被打乱,从而确保可靠调节。
本发明还涉及一种如前所述的控制方法,包括以下步骤:
–通过将所述涡轮机出口气体温度参数与由预定调整阈值简化而来的所述涡轮机出口气体温度参数的最大值进行比较来激活温度保护控制;
–当所述温度保护控制被激活时激活所述温度校正变量。
优选地,该方法包括在执行所述第二扭矩调节环路的步骤中将所述扭矩设定值归零的步骤,在所述温度保护控制被激活的情况下,所述扭矩设定值归零的所述步骤将被禁止。
有利地,所述控制方法包括将扭矩设定值归零的步骤,所述步骤被连续执行但在所述燃料设定值控制达到极限时被禁止。换句话说,所述电扭矩是不连续使用的以避免过度的电力消耗。当达到所述燃料设定值调节极限(泵送、熄火、EGT温度等)时,所述电扭矩被注入至高压轴,以实现相互抵消。换句话说,所述电扭矩的注入使得可以为所述第一燃料调节环路提供调节余量。一旦获得此余量,所述扭矩设定值则可归零,具体地逐渐归零。
优选地,所述扭矩设定值逐渐归零,优选地根据至少一个降低梯度逐渐归零。渐进式归零与会引起所述涡轮机的所述发动机速度扰动的突然归零对立。根据降低梯度逐步归零使得可以控制所述第二扭矩调节环路降低其影响的速度,从而使得所述第一燃料调节环路重新获得其影响。
优选地,所述方法包括对所述扭矩校正变量进行简单整合以确定所述扭矩设定值的步骤。
本发明还涉及一种计算机程序,其包括用于在所述计算机执行所述程序时执行如前所述的控制方法的步骤的指令。本发明还涉及一种所述计算机程序的记录介质。上述记录介质可以是任何能够存储所述程序的实体或装置。例如,所述介质可以包括存储介质,诸如ROM,例如CD ROM或微电子电路ROM,或磁性记录介质,例如硬盘。另一方面,所述记录介质还可以对应于诸如电信号或光信号等的可传输介质,所述可传输介质可经由电缆或光缆、无线电或其他方式传送。根据本发明的所述程序尤其可下载至互联网类型的网络上。替代地,所述记录介质可对应于集成有该程序的集成电路,所述电路适于执行或用于执行所讨论的方法。
本发明还进一步涉及一种用于涡轮机的包括存储器的电子控制单元,所述存储器包括来自如前所述的计算机程序的指令。
本发明还涉及一种包括如前所述的电子单元的涡轮机。
附图说明
通过阅读作为示例给出的以下描述并且参考作为非限制性示例给出的以下附图,将更好地理解本发明,其中,相同的附图标号指代相似对象:
图1是现有技术的涡轮机的示意图;
图2是现有技术的用于调节燃料流量设定值的系统的示意图;
图3是本发明的一个实施例的涡轮机的示意图;
图4是本发明的出口温度调节系统的示意图;
图5是本发明的用于调节燃料流量设定值和扭矩设定值的系统的示意图;
图6是图5所示的调节系统的第一燃料调节环路的示意图;
图7是图5所示的调节系统的第二扭矩调节环路的示意图。
应当注意,附图详细阐述本发明以实现本发明,如有必要所述附图当然可以用来更好地定义本发明。
具体实施方式
参考图3,其示出了呈双轴涡轮风扇类型飞行器的涡轮机T。已知地,涡轮机T沿气流方向从上游至下游包括风扇10、低压压缩机11、高压压缩机12、设有燃料流量设定值WF
参考图3,涡轮机T还包括用于向高压轴22提供附加扭矩的电机ME。涡轮机T的运行由电子单元20控制,该电子单元20获取表征涡轮机T运行参数的信号,特别是涡轮机T的发动机速度NL,以将燃料流量设定值WF
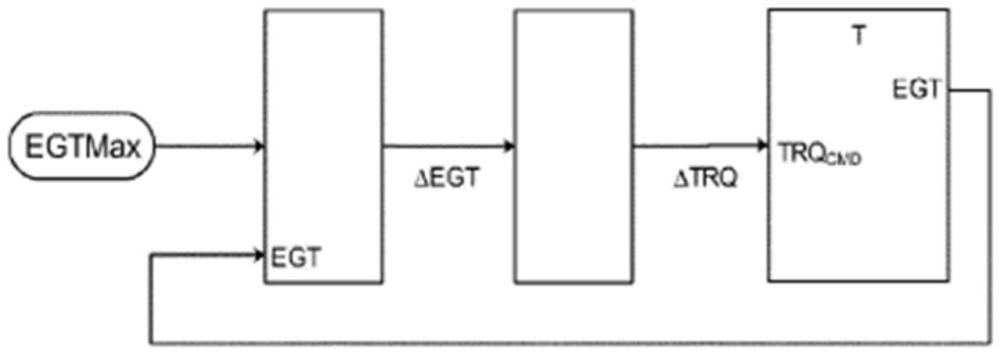
如图4所示,该方法包括根据涡轮机T的涡轮机出口处的气体温度参数EGT和涡轮机出口处的气体温度参数的最大值EGTMax来确定温度校正变量ΔEGT的步骤。该方法包括根据温度校正变量ΔEGT确定扭矩校正变量ΔTRQ的步骤以及依据扭矩校正变量ΔTRQ确定扭矩设定值TRQ
电扭矩使得可以在不降低总扭矩性能的同时有利地降低出口温度EGT,这是有利的。
如图5所示,电子单元20包括调节系统,该调节系统包括用于调节燃料流率设定值WF
如图5所示,第一燃料环路B1包括:
–温度输入端T2;
–涡轮机T的发动机转速输入端NL;
–可由飞行器飞行员操作的操纵杆的位置定义的设定发动机速度输入端NL
–被传输至涡轮机T的燃料流量设定值输出端WF
–多个输出端指令:
–加速瞬态请求的指令TopAccel;
–减速瞬态请求的指令TopDecel;
–由加速C/P停止对校正器的控制饱和度定义的加速停止指令TopButeeAccel;
–由熄火C/P停止对校正器的控制饱和度定义的减速停止指令TopButeeDecel;
–用于加速的发动机速度轨迹设定值NLTrajAccCons;
–用于减速的发动机速度轨迹设定值NLTrajDecelCons;
仍然参考图5,第二扭矩环路B2接收第一燃料环路B1产生的所有输出端指令,如TopAccel、TopDecel、TopButeeAccel、TopButeeDecel、NLTrajAccCons、NLTrajDecelCons以及涡轮机T的发动机转速输入端NL以作为其输入端。
根据本发明的实施例,出口温度的调节被直接集成于第二扭矩环路B2中,从而使得可以同时考虑所有调节。
第二扭矩环路B2还接收涡轮机的出口处的气体温度参数EGT(以下称为温度参数EGT)以及涡轮机的出口处气体的最大温度值EGTMax以作为其输入端。参数EGT由涡轮机T的传感器获得。有利地,由于此调节系统,第二扭矩环路B2使得可以根据燃料环路B1以及温度参数EGT得到自适应扭矩设定值TRQ
在本实施例中,第一燃料环路B1还包括燃烧室的静压输入端PS3。
下文将详细介绍每个环路B1、B2的结构和操作。
已知地,参考图6,第一燃料环路B1包括稳定管理模块301、瞬态意图检测模块302、用于生成发动机速度轨迹的模块303、选择模块304、整合模块305以及实现整合饱和功能并因此实现燃料控制WF
如下文将描述的,用于生成发动机速度轨迹的模块303还被配置为生成用于监督此轨迹的控制器。
稳定管理模块301根据涡轮机T的发动机速度NL与设定发动机速度NL
瞬态意图检测模块302的目的是检测飞行员期望的瞬态意图。瞬态意图检测模块302确定涡轮机T的发动机速度NL与设定发动机速度NL
根据本发明,瞬态意图检测模块302还提供加速瞬态请求指令TopAccel和减速瞬态请求指令TopDecel。在加速的情况下,如果发动机速度差大于预定阈值S3(NL
如图6所示,当检测到瞬态阶段时,瞬态意图检测模块302产生激活信号,该激活信号被传输至发动机速度轨迹生成模块303和选择模块304。
在加速的情况下,用于生成发动机速度轨迹的模块303确定用于加速(加速轨迹)的发动机速度设定值NLTrajAccCons。类似地,在减速的情况下,用于生成发动机速度轨迹的模块303确定用于减速(减速轨迹)的发动机速度设定值NL NLTrajDecelCons。用于生成发动机速度轨迹的模块303对于本领域所属技术人员是已知的并将不进一步介绍,特别是通过专利申请US2013/0008171已知。此外,生成模块303还被配置为生成校正变量,这使得可以在需要时遵循设定值轨迹。
在本实施例中,当选择模块304从瞬态意图检测模块302接收激活信号时,选择模块304在未接收到激活信号的情况下从稳定管理模块301选择校正变量,并在接收到激活信号的情况下从发动机速度轨迹生成模块303选择校正变量。该选择模块304对于本领域所属技术人员是已知的并将不再详细呈现。
所选择的燃料校正变量ΔWF被提供给整合模块305。整合模块305通过对燃料的校正变量ΔWF进行整合来确定燃料流量设定值WF
停止管理模块306限制由整合模块305确定的燃料流量设定值WF
如前所述,该调节对于限制被传输至涡轮机T的燃料设定值WF
为了消除此缺点,第二扭矩环路B2连接至第一燃料环路B1以确定最佳扭矩设定值TRQ
第二扭矩调节环路B2旨在保持对温度参数EGT的控制的同时少量地使用电机ME。因此,仅当轨迹受限(TopButeeAccel或TopButeeDecel)、当设定发动机速度NL
如下文将描述的,所提供的电扭矩TRQ
由于本发明,第一燃料环路B1与第二扭矩环路B2交换以提高涡轮机T的可操作性(温度控制、响应时间等),同时减小电机ME的电能消耗。
参考图7,第二扭矩调节环路B2包括控制判断模块401、归零模块402、整合模块403、开关404和处理模块405。
控制判断模块401包括:
–涡轮机的当前发动机转速输入端NL;
–为扭矩控制提供设定值变量的用于加速(加速轨迹)的发动机速度设定值NLNLTrajAccCons;
–为扭矩控制提供设定值变量的用于减速(减速轨迹)的发动机速度设定值NLNLTrajDecelCons;
–温度参数EGT输入端;
–最大温度值EGTMax。
控制判断模块401包括分别用于计算加速(扭矩加速)的扭矩控制TRQTrajAccCmd的加速子模块401a和用于计算减速(扭矩减速)的扭矩控制TRQTrajDecCmd的减速子模块401d。
在此示例中,加速子模块401a根据加速(加速轨迹)的速度设定值NLNLTraJAccCons以及当前发动机速度NL来计算加速(加速扭矩)的校正变量TRQTrajAccelCmd。该加速子模块401a的结构对于本领域所属技术人员是已知的。优选地,加速子模块401a呈纯相位超前型校正器的形式,特别是一阶高通。减速子模块401d的结构和功能与之类似。
控制确定模块401还包括温度子模块401t,该温度子模块401t根据温度参数EGT及其最大温度EGTMax来计算温度校正变量ΔEGT。优选地,温度子模块401t呈纯相位超前型校正器的形式,特别是一阶高通。
参考图7,处理模块405还包括比较器,该比较器被配置为将温度参数EGT与由预定调整阈值ΔSeuil简化而来的最大温度值EGTMax进行比较。当温度参数EGT接近最大温度值EGTMax时,激活温度保护控制ActiveProtEGT。温度保护控制ActiveProtEGT使得可以激活温度校正变量ΔEGT。
在测试期间根据调节响应时间和温度参数EGT允许的超出时间来确定预定调整阈值ΔSeuil。允许的临时超出时间越大和/或环路响应时间越快,设置的调整阈值ΔSeuil就越低。
处理模块405另外还包括最大值选择器,该最大值选择器使得可以在温度校正变量ΔEGT和加速校正变量TRQTrajAccCmd之间选择其中的最大值,以满足扭矩输入端的最高限制。换句话说,在加速请求期间,电机ME还使得可以在避免加载涡轮机T的同时调节温度参数EGT。
参考图7,选择器404确保了整合模块403对整合前的控制的选择,以便在减速时选择减速控制或在加速时选择加速控制。
归零模块402包括来自第一燃料环路B1的多个输入端指令:
–加速瞬态请求指令TopAccel;
–减速瞬态请求指令TopDecel;
–由加速C/P停止对校正器的控制饱和度定义的加速停止指令TopButeeAccel;
–由熄火C/P停止对校正器的控制饱和度定义的减速停止指令TopButeeDecel。
归零模块402旨在经由整合器403的归零将扭矩控制TRQ
–当请求加速且已经达到加速停止时(TopAccel和TopButeAccel被激活)(ActiveCmdTrqAccel状态);
–当请求减速且已经达到减速极限时(TopDecel和TopButeeDecel被激活)(ActiveCmdTrqDecel状态);或
–当温度保护控制ActiveProtEGT被激活时。
当第一燃料环路B1的燃料设定值WF
换言之,第二扭矩环路B2与第一燃料环路B1协同作用。第二扭矩环路B2支持第一燃料环路B1。在稳定的发动机速度下,扭矩设定值TRQ
参考图7,整合模块403包括:
–从选择器404接收扭矩校正变量ΔTRQ的校正输入端;
–由电机ME的结构确定的最大扭矩值TRQmax,TRQmax表示电机ME的最大可控电机扭矩(按照惯例为正);
–由电机ME的结构确定的最小扭矩值TRQmin,TRQmin表示电机ME的最大可控制动扭矩(按照惯例为负);
–由归零模块402提供的归零输入端RAZ;
–扭矩设定值输出端TRQ
优选地,电机ME的最小扭矩值TRQmin和最大扭矩值TRQmax不一定是常数,而是与各种参数成函数关系的法则,以使得可以充分利用电机ME的操作极限。
在本实施中,整合模块403是简单的整合器,以便对扭矩连接变量ΔTRQ进行整合。这使得可以确保永久的零速度误差,从而确保预定的增速或减速时间。在实践中,由于与燃料控制相结合的影响,用于控制的1级校正器足以消除轨迹跟随误差。通过消除由一个整合器引起的–90°相移效应,有利地提高了监督稳定性。
去除由电机ME提供的扭矩TRQ的同时必须通过适配燃料设定值WF
现将介绍用于控制涡轮机的方法的示例性实施例,其中,燃料流量设定值WF
例如,当飞行员操纵操纵杆以增加涡轮机T的发动机转速时,第一调节环路B1经由瞬态意图检测模块302检测发动机转速瞬态并发出加速瞬态请求TopAccel的指令。类似地,用于生成发动机速度轨迹的模块303确定加速(加速轨迹)的发动机速度设定值NLTrajAccCons。加速轨迹呈斜率的形式。此外,停止管理模块306限制燃料流量设定值WF
当温度参数EGT接近其最大值EGTMax时,计算校正值ΔEGT并将其与加速校正值TRQTrajAccCmd进行比较。在ΔEGT与TRQTrajAccCmd之间选择的最大校正值被提供给比较器404,以便激活电机ME从而相应性地降低涡轮机T的出口气体的温度。换句话说,本发明提供了优化的加速校正值以考虑温度参数EGT。因此无需全部修改调节系统来调节温度参数EGT。
由于本发明,电机ME被少量使用从而使得可以遵循最佳轨迹,进而使得可以在保持对温度参数EGT的控制的同时为调节燃料设定值WF
已呈现在加速的情况下的温度调节,但该温度调节也可在全速运行期间或起飞时发生。