一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统
文献发布时间:2023-06-19 12:18:04
技术领域
本发明属于力学测试技术领域,尤其涉及一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统,具有测试过程无干扰、测力精度微牛级等特点。
背景技术
接触面对昆虫运动系统的作用力称为接触反力,其测试在机械仿生领域应用较为普遍。运动是动物繁衍、捕食、躲避天敌的基础。许多动物,诸如苍蝇、蚊子、水黾等,拥有独特的运动功能特性,使其完成复杂运动行为。测力系统不断被研制出,用以昆虫接触反力的测试。飞行昆虫在降落/起飞时对界面产生的作用力,亦为接触反力。该接触反力的测试,对研究其运动特性至关重要,还将利于小型飞行机器人的研制。该接触反力的测试精度在微牛级,且测试过程不能有人为干扰,否则会造成接触反力测试数据的不准确。
发明专利CN101380235A公开了一种动物足-面接触反力的测试方法及系统测力技术,该方法通过16个传感器组成2×8式传感器阵列,用于测试动物在地面、壁面和天花板表面的接触力,测试系统主要由弹性体、金属应变片、有机玻璃板和摄像机组成,弹性体结构呈倒T形状,其分布有腰型孔以减轻弹性体重量,避免重力对测力结果产生影响,有机玻璃板上对应的测力片位置处设置长宽为31毫米的正方形方孔,传感器测力片的测力范围为30毫米×30毫米,但该项技术适用于测试大型爬行动物的接触反力,对于飞行昆虫则不能满足测试需求,更不能测试起飞/降落过程中的接触反力。发明专利CN107340231A公开了一种离心式微牛级昆虫摩擦力在线实时测试系统及测试方法,测试系统包括测试平台及附属机构、调速电机及转速控制器、视频监控系统和能够实现各部件固定安装的机座等4部分,采用滚珠丝杠及步进电机结构,能够精确控制高速视频成像系统的位移,视频监控系统的摄像机中心与测试平台中心保持重合,摄像机具有垂直方向上自由度可调节功能,并可实时调节其与测试平台的垂直距离,用于准确获取测试对象脱离平台时的半径信息,由此计算出测试对象在材料表面产生的最大附着力,但该测力系统仅用于测试昆虫在材料表面的最大附着力,而不能测试飞行昆虫降落/起飞时在界面产生的接触反力。发明专利CN105444940A提出了一种微小力值的测量方法,该发明利用阴影提取法观测水生昆虫腿部与水面接触产生的阴影面积计算获取运动支撑力,根据所拍摄到的水生昆虫在水面上划行产生的阴影图片,通过阿基米德原理对水生昆虫腿部进行三维模型的重建并计算出相应的运动支撑力,该发明涉及的测力技术,测试精度可达到微牛级,但测试对象只能为水生昆虫,不能用于飞行昆虫降落/起飞时的接触反力的测试。
综上所述,现阶段以测力传感器阵列为核心、基于离心运动原理、基于图像处理的接触反力测试系统,其在测力精度、测试对象固定平台等方面不能满足飞行昆虫降落/起飞时在界面产生的接触反力的测试。因此,需要研制一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统,具有测试过程无干扰(不影响昆虫的生理活性)、测力精度微牛级等特点。
发明内容
本发明要解决的技术问题是提供一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统,该系统专门用于测试飞行昆虫降落/起飞时在界面产生的接触反力,具有测试过程无干扰(不影响昆虫的生理活性)、测力精度微牛级等特点,能够真实反映飞行昆虫降落/起飞时在界面产生的接触反力。
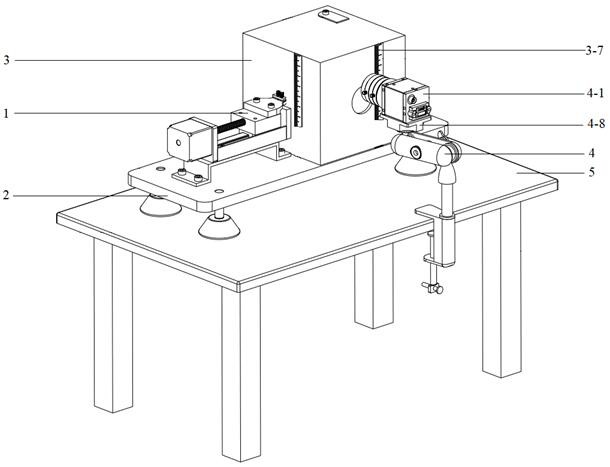
为解决上述技术问题,本发明所采取的技术方案是:一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统,其特征在于包括测试系统安放平台及置于测试系统安放平台上的测试系统底座和高帧数摄像机,其中测试系统底座上安装方形的有机玻璃罩和可以进出有机玻璃罩的碳纤维弹簧,所述的有机玻璃罩侧面粘贴有碳纤维弹簧垂直定位标尺、位置与挠度信息参考标尺、高帧数摄像机垂直定位标尺,有机玻璃罩上表面设有飞行昆虫投放方孔,飞行昆虫投放方孔处设置飞行昆虫投放方孔挡板,有机玻璃罩的两个相邻侧面分别设有碳纤维弹簧安放方孔和高帧数摄像机镜头移动通道,其中碳纤维弹簧安放方孔为碳纤维弹簧进出于有机玻璃罩通道,高帧数摄像机镜头移动通道为高帧数摄像机的移动通道,高帧数摄像机可通过高帧数摄像机镜头移动通道进入有机玻璃罩并采集测试图像。
对上述方案作进一步限定,所述的碳纤维弹簧由移动控制组件驱动,其中移动控制组件包括扇形底座、扇形底座固定螺钉、半圆形橡胶垫、半圆形压板、夹紧螺栓、步进电机、步进电机固定支架、扇形底座固定滑块、轴承固定支架、滚动轴承、滚珠丝杠、滑块、导轨、底座、底座固定螺钉、步进电机固定凸板,所述的碳纤维弹簧通过夹紧螺栓固定在扇形底座与半圆形压板之间,在半圆形压板的下部设置半圆形橡胶垫,扇形底座通过扇形底座固定螺钉固定安装在扇形底座固定滑块上;步进电机通过螺钉固定安装在步进电机固定支架上,轴承固定支架与滚动轴承配合,通过螺钉将轴承固定支架与底座固定安装;步进电机固定支架固定安装在底座上,扇形底座固定滑块与滚珠丝杠配合,滚珠丝杠与步进电机固定支架、轴承固定支架之间固定安装;滑块与导轨配合安装,采用螺钉将导轨固定安装在底座上,底座通过底座固定螺钉固定安装在步进电机固定凸板上;碳纤维弹簧通过步进电机驱动滚珠丝杠、滑块、导轨部件,被推入或者移出有机玻璃罩。
对上述方案作进一步限定,所述测试系统底座上设置照明组件,其中照明组件由LED照明光源和LED照明光源固定斜台组成,LED照明光源和LED照明光源固定斜台之间采用双面胶粘接的方式进行固定,并放置于有机玻璃罩内部。
对上述方案作进一步限定,所述的测试系统底座上设置有调平地脚螺纹孔、有机玻璃罩安装卡槽,其中调平地脚螺纹孔设置于测试系统底座下表面4个角,分别与调平地脚螺栓连接,有机玻璃罩安装卡槽用于有机玻璃罩在测试系统底座上的安放。
对上述方案作进一步限定,所述碳纤维弹簧垂直定位标尺、位置与挠度信息参考标尺、高帧数摄像机垂直定位标尺分别处于有机玻璃罩的侧面、背面和正面,碳纤维弹簧垂直定位标尺和高帧数摄像机垂直定位标尺校准碳纤维弹簧和高帧数摄像机镜头的中心在垂直方向上的距离,使之能够保持在同水平线上;有机玻璃罩的背面放置位置与挠度信息参考标尺,由2把标尺组合而成并成90°垂直,用于精确获取碳纤维弹簧在飞行昆虫接触反力测试过程中的位置数据和挠度数据,即水平方向的标尺用于获取位置数据,垂直方向上的标尺用于获取挠度数据。
对上述方案作进一步限定,所述高帧数摄像机通过固定组件与系统安放平台连接,其中系统安放平台包括机架、万向旋转元件、高帧数摄像机连接件固定螺栓、万向旋转元件夹紧旋钮、垂直固定螺栓、水平固定螺栓、高帧数摄像机连接件组成,其中高帧数摄像机连接件设置高帧数摄像机固定螺纹孔与高帧数摄像机连接件固定螺纹孔;高帧数摄像机通过高帧数摄像机固定螺纹孔及螺钉与高帧数摄像机连接件固定,机架与万向旋转元件之间夹紧固定;万向旋转元件通过万向旋转元件夹紧旋钮锁止;高帧数摄像机连接件固定螺栓与高帧数摄像机连接件固定螺纹孔配合;机架通过垂直固定螺栓、水平固定螺栓与测试系统安放平台连接。
采用上述技术方案所产生的有益效果在于:本发明提供一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统,该系统利用碳纤维弹簧配合高帧数摄像机,对容器内的昆虫在无干扰状态下(不影响昆虫的生理活性)降落或起飞时,会使碳纤维弹簧产生挠度,此时高帧数摄像机对整个过程进行高清视频记录,对所记录的视频转换成图片,然后通过位置与挠度信息参考标尺分析获取位置数据和挠度数据,再将位置数据和挠度数据带入碳纤维弹簧的特性方程,求解获取飞行昆虫无干扰状态下在碳纤维弹簧上降落/起飞时产生的接触反力,该系统可以实现微牛级的测力精度,能够真实反映飞行昆虫降落/起飞时在界面产生的接触反力,对揭示飞行昆虫的运动机制具有重要研究意义,并利于小型飞行机器人研制。
附图说明
图1本发明的整体结构示意图;
图2本发明的轴侧图;
图3本发明的碳纤维弹簧固定组件轴侧图;
图4本发明的步进电机组件轴侧图;
图5本发明的测试系统底座轴侧图;
图6本发明的有机玻璃罩轴侧图;
图7本发明的有机玻璃罩及其标尺组件轴侧图;
图8本发明的飞行昆虫投放方孔挡板轴侧图;
图9本发明的高帧数摄像机固定支架轴侧图;
图10本发明的高帧数摄像机连接件轴侧图;
图11本发明的功能流程图;
图中:1、碳纤维弹簧及其移动控制组件;1-1、碳纤维弹簧;1-2、扇形底座;1-3、扇形底座固定螺钉;1-4、半圆形橡胶垫;1-5、半圆形压板;1-6、夹紧螺栓;1-7、步进电机;1-8、步进电机固定支架;1-9、扇形底座固定滑块;1-10、轴承固定支架;1-11、滚动轴承;1-12、滚珠丝杠;1-13、滑块;1-14、导轨;1-15、底座;1-16、底座固定螺钉;1-17、步进电机固定凸板;2、测试系统底座及其照明组件;2-1、LED照明光源;2-2、LED照明光源固定斜台;2-3、调平地脚螺纹孔;2-4、凸板固定螺纹孔;2-5、有机玻璃罩安装卡槽;2-6、调平地脚螺栓;2-7、测试系统底座;3、有机玻璃罩及其标尺组件;3-1、碳纤维弹簧安放方孔;3-2、飞行昆虫投放方孔;3-3、高帧数摄像机镜头移动通道;3-4、有机玻璃罩;3-5、碳纤维弹簧垂直定位标尺;3-6、位置与挠度信息参考标尺;3-7、高帧数摄像机垂直定位标尺;3-8、飞行昆虫投放方孔挡板;3-8-1、飞行昆虫方形孔通道压板固定螺纹孔;3-8-2、飞行昆虫投放方孔挡板固定螺栓;4、高帧数摄像机及其固定组件;4-1、高帧数摄像机;4-2、机架;4-3、万向旋转元件;4-4、高帧数摄像机连接件固定螺栓;4-5、万向旋转元件夹紧旋钮;4-6、垂直固定螺栓;4-7、水平固定螺栓;4-8、高帧数摄像机连接件;4-8-1、高帧数摄像机固定螺纹孔;4-8-2、高帧数摄像机连接件固定螺纹孔;5、测试系统安放平台。
具体实施方式
以下实施例用于说明本发明,但绝非用于限制本发明的范围。
根据附图1可知,本发明具体为一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统,主要包括碳纤维弹簧及其移动控制组件1、测试系统底座及其照明组件2、有机玻璃罩及其标尺组件3、高帧数摄像机及其固定组件4、测试系统安放平台5。
如图1、图2、图3、图4所示,碳纤维弹簧及其移动控制组件1由碳纤维弹簧1-1、扇形底座1-2、扇形底座固定螺钉1-3、半圆形橡胶垫1-4、半圆形压板1-5、夹紧螺栓1-6、步进电机1-7、步进电机固定支架1-8、扇形底座固定滑块1-9、轴承固定支架1-10、滚动轴承1-11、滚珠丝杠1-12、滑块1-13、导轨1-14、底座1-15、底座固定螺钉1-16、步进电机固定凸板1-17等组成。碳纤维弹簧及其移动控制组件1的碳纤维弹簧1-1用于感知飞行昆虫降落/起飞时产生的接触反力,即飞行昆虫从碳纤维弹簧1-1降落或起飞至碳纤维弹簧1-1上时,会使碳纤维弹簧1-1产生挠度变化,根据碳纤维弹簧1-1的特性方程可获取不同挠度对应的接触反力。碳纤维弹簧1-1通过夹紧螺栓1-6固定在扇形底座1-2与半圆形压板1-5之间,为保证碳纤维弹簧1-1不被半圆形压板1-5压坏,在半圆形压板1-5的下部设置半圆形橡胶垫1-4,用于碳纤维弹簧1-1所承受压力的缓冲;扇形底座1-2通过扇形底座固定螺钉1-3固定安装在扇形底座固定滑块1-9上。步进电机1-7通过螺钉固定安装在步进电机固定支架1-8上,轴承固定支架1-10与滚动轴承1-11配合,通过螺钉将轴承固定支架1-10与底座1-15实现固定安装;步进电机固定支架1-8固定安装在底座1-15上,扇形底座固定滑块1-9与滚珠丝杠1-12配合,滚珠丝杠1-12再与步进电机固定支架1-8、轴承固定支架1-10实现固定安装,用以实现滚珠丝杠1-12的转动;滑块1-13与导轨1-14配合安装,采用螺钉将导轨1-14固定安装在底座1-15上,底座1-15通过底座固定螺钉1-16固定安装在步进电机固定凸板1-17上。在测试飞行昆虫接触反力时,碳纤维弹簧1-1通过步进电机1-7、滚珠丝杠1-12、滑块1-13、导轨1-14等部件移动至有机玻璃罩3-4内,以供飞行昆虫停靠并在降落与起飞过程中产生接触反力;不测试飞行昆虫接触反力时,碳纤维弹簧1-1通过步进电机1-7、滚珠丝杠1-12、滑块1-13、导轨1-14等部件移动至有机玻璃罩3-4外,用以保护碳纤维弹簧1-1。
如图1、图2、图5所示,测试系统底座及其照明组件2由LED照明光源2-1、LED照明光源固定斜台2-2、调平地脚螺纹孔2-3、凸板固定螺纹孔2-4、有机玻璃罩安装卡槽2-5、调平地脚螺栓2-6、测试系统底座2-7等组成。因为LED照明光源2-1质量较小,故LED照明光源2-1和LED照明光源固定斜台2-2之间采用双面胶粘接的方式进行固定,并放置于有机玻璃罩3-4内部,用以提高有机玻璃罩3-4内部的光亮度,提升飞行昆虫接触反力测试过程中拍摄图像的质量,最终提高接触反力测试数据的准确性。调平地脚螺栓2-6分布在测试系统底座2-7的4个角落,调平地脚螺纹孔2-3与调平地脚螺栓2-6配合,用以保证测试系统底座2-7的水平度;凸板固定螺纹孔2-4用于实现步进电机固定凸板1-17与测试系统底座2-7的固定安装,有机玻璃罩安装卡槽2-5用于实现有机玻璃罩3-4在测试系统底座2-7上的安放。
如图1、图6、图7、图8所示,有机玻璃罩及其标尺组件3主要由碳纤维弹簧安放方孔3-1、飞行昆虫投放方孔3-2、高帧数摄像机镜头移动通道3-3、有机玻璃罩3-4、碳纤维弹簧垂直定位标尺3-5、位置与挠度信息参考标尺3-6、高帧数摄像机垂直定位标尺3-7、飞行昆虫投放方孔挡板3-8、飞行昆虫方形孔通道压板固定螺纹孔3-8-1、飞行昆虫投放方孔挡板固定螺栓3-8-2等组成。碳纤维弹簧安放方孔3-1为碳纤维弹簧1-1的安放方孔,用以实现碳纤维弹簧1-1在有机玻璃罩3-4内部、外部的切换。飞行昆虫投放方孔3-2为飞行昆虫的投放通道,可采用飞行昆虫投放方孔挡板3-8进行遮挡,以防止飞行昆虫飞离有机玻璃罩3-4;飞行昆虫方形孔通道压板固定螺纹孔3-8-1与飞行昆虫投放方孔挡板固定螺栓3-8-2配合,以此实现有机玻璃罩3-4与飞行昆虫投放方孔挡板3-8的固定安装。高帧数摄像机镜头移动通道3-3为高帧数摄像机4-1的移动通道,高帧数摄像机4-1可通过高帧数摄像机镜头移动通道3-3进入有机玻璃罩3-4,高帧数摄像机镜头移动通道3-3分布在有机玻璃罩3-4的正面,用于飞行昆虫接触反力测试过程中测试图像的清晰拍摄。碳纤维弹簧垂直定位标尺3-5、位置与挠度信息参考标尺3-6、高帧数摄像机垂直定位标尺3-7分别处于有机玻璃罩3-4的侧面、背面和正面,碳纤维弹簧垂直定位标尺3-5和高帧数摄像机垂直定位标尺3-7用于校准碳纤维弹簧1-1和高帧数摄像机4-1镜头的中心在垂直方向上的距离,能够保持在同水平线上;有机玻璃罩3-4的背面放置位置与挠度信息参考标尺3-6,由2把标尺组合而成并成90°垂直,用于精确获取碳纤维弹簧1-1在飞行昆虫接触反力测试过程中的位置数据和挠度数据,即水平方向的标尺用于获取位置数据,垂直方向上的标尺用于获取挠度数据。
如图1、图9、图10所示,高帧数摄像机及其固定组件4由高帧数摄像机4-1、机架4-2、万向旋转元件4-3、高帧数摄像机连接件固定螺栓4-4、万向旋转元件夹紧旋钮4-5、垂直固定螺栓4-6、水平固定螺栓4-7、高帧数摄像机连接件4-8等组成。其中,高帧数摄像机连接件4-8设置高帧数摄像机固定螺纹孔4-8-1与高帧数摄像机连接件固定螺纹孔4-8-2。高帧数摄像机4-1与高帧数摄像机连接件4-8的固定是通过高帧数摄像机固定螺纹孔4-8-1及螺钉实现的;通过夹紧的形式实现机架4-2与万向旋转元件4-3的固定;万向旋转元件4-3通过万向旋转元件夹紧旋钮4-5实现锁止;高帧数摄像机连接件固定螺栓4-4与高帧数摄像机连接件固定螺纹孔4-8-2配合,用以实现高帧数摄像机连接件4-8与高帧数摄像机固定支架的安装;垂直固定螺栓4-6与测试系统安放平台5通过螺栓连接的形式实现固定安装;水平固定螺栓4-7的设置,用以进一步提高高帧数摄像机4-1的稳定性,可与实验台或其他类似目标物固定。
下面结合附图,对本发明涉及的一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统的工作过程作详细阐述,以苍蝇作为本发明实施例的测试对象,苍蝇的重量为21.25毫克。
如图1、图2、图3、图4所示,测试系统安放平台5作为整个微牛级飞行昆虫接触反力测试系统的支撑平台,其具有刚度好、稳定性高等特点,测试系统安放平台5的上表面长400.0毫米、宽250.0毫米,可用于放置碳纤维弹簧及其移动控制组件1、测试系统底座及其照明组件2、有机玻璃罩及其标尺组件3、高帧数摄像机及其固定组件4等。本系统的核心部件为碳纤维弹簧及其移动控制组件1与高帧数摄像机及其固定组件4;扇形底座1-2的材质为铝合金,扇形底座1-2底部右边缘与扇形底座固定滑块1-9底部右边缘对齐安装;扇形底座1-2、半圆形橡胶垫1-4、半圆形压板1-5均为圆弧结构且相互重合,半径均为8.0毫米,并通过夹紧螺栓1-6实现固定。碳纤维弹簧1-1处于扇形底座1-2和半圆形压板1-5的中间并以夹紧的形式实现固定,半圆形橡胶垫1-4和半圆形压板1-5分别为橡胶和铝合金材质,通过扇形底座固定螺钉1-3将扇形底座1-2固定安装在扇形底座固定滑块1-9上;扇形底座固定滑块1-9长33.0毫米、宽32.0毫米,其有效行程为50.0毫米,滚珠丝杠1-12的直径为6.0毫米,螺距为1.0毫米,步进电机1-7带动扇形底座固定滑块1-9实现水平移动,扇形底座1-2固定安装在扇形底座固定滑块1-9上,以此使得扇形底座1-2沿水平方向移动,并具有运行平稳的优点。通过底座固定螺钉1-16将底座1-15固定安装在步进电机固定凸板1-17上,步进电机固定凸板1-17为凸型结构,材质为铝合金;底座1-15的底面长33.5毫米,宽18.0毫米;步进电机固定凸板1-17总长为118.0毫米、总宽为33.5毫米、总高为18.0毫米,通过4个M4×6螺钉将步进电机固定凸板1-17固定安装在测试系统底座2-7上。
如图1、图2、图5、图6所示,有机玻璃罩3-4内部放置有LED照明光源2-1、LED照明光源固定斜台2-2。因为LED照明光源2-1质量较小,所以LED照明光源2-1和LED照明光源固定斜台2-2之间采用双面胶粘接的方式进行固定,并放置于有机玻璃罩3-4的内部,用以提高有机玻璃罩3-4内部的光亮度,提升飞行昆虫接触反力测试过程中拍摄图像的质量,最终提高接触反力测试数据的准确性。测试系统底座2-7的角落分布有4个调平地脚螺纹孔2-3,调平地脚螺纹孔2-3与调平地脚螺栓2-6配合,用以保证测试系统底座2-3的水平度;测试系统底座2-7的上表面设置如图5所示的有机玻璃罩安装卡槽2-5,用于有机玻璃罩3-4的安放。
如图1、图5、图6、图7、图8所示,有机玻璃罩3-4左侧设置长12.2毫米、宽6.2毫米的碳纤维弹簧安放方孔3-1,上方设置长、宽均为10.0毫米的飞行昆虫投放方孔3-2,正面设置直径为27.0毫米的高帧数摄像机镜头移动通道3-3,高帧数摄像机镜头移动通道3-3镜头的中心与碳纤维弹簧安放方孔3-1中心在垂直方向上的距离相等。飞行昆虫方形孔通道压板固定螺纹孔3-8-1与飞行昆虫投放方孔挡板固定螺栓3-8-2配合,用以实现有机玻璃罩3-4与飞行昆虫投放方孔挡板3-8的固定安装,以防止苍蝇飞离有机玻璃罩3-4;有机玻璃罩3-4长106.0毫米、宽106.0毫米、高103.0毫米,其厚度为3.0毫米,有机玻璃罩安装卡槽2-5是按照有机玻璃罩3-4的尺寸所定制,有机玻璃罩安装卡槽2-5的外侧区域长106.0毫米、宽106.0毫米,其深度为2.0毫米。碳纤维弹簧垂直定位标尺3-5、位置与挠度信息参考标尺3-6、高帧数摄像机垂直定位标尺3-7分别位于有机玻璃罩3-4的侧面、背面和正面。碳纤维弹簧垂直定位标尺3-5和高帧数摄像机垂直定位标尺3-7用于确定碳纤维弹簧1-1与高帧数摄像机4-1镜头的中心在垂直方向上的距离一致,处于同高度;有机玻璃罩3-4背面的位置与挠度信息参考标尺3-6,由2把标尺组合而成并成90°垂直,采用双面胶粘接的方式进行固定,用于精确获取碳纤维弹簧1-1在飞行昆虫接触反力测试过程中的位置数据和挠度数据,即水平方向的标尺用于获取位置数据,垂直方向上的标尺用于获取挠度数据。
如图1、图9、图10所示,高帧数摄像机4-1与高帧数摄像机连接件4-8的固定是通过高帧数摄像机固定螺纹孔4-8-1及螺钉实现的,高帧数摄像机连接件4-8长38.7毫米、宽30.0毫米、高10.0毫米,为铝合金材质,底部分布4个直径为3.5毫米的高帧数摄像机固定螺纹孔4-8-1;高帧数摄像机连接件4-8中间设置高帧数摄像机连接件固定螺纹孔4-8-2,高帧数摄像机连接件固定螺栓4-4与高帧数摄像机连接件4-8中的高帧数摄像机连接件固定螺纹孔4-8-2配合,用以实现高帧数摄像机连接件4-8与高帧数摄像机固定支架的安装;通过夹紧的形式实现机架4-2与万向旋转元件4-3的固定,万向旋转元件4-3通过万向旋转元件夹紧旋钮4-5实现锁止;高帧数摄像机连接件固定螺栓4-4与高帧数摄像机连接件固定螺纹孔4-8-2配合,用以实现高帧数摄像机连接件4-8与高帧数摄像机固定支架的安装;通过螺栓连接的形式实现垂直固定螺栓4-6与测试系统安放平台5的固定,水平固定螺栓4-7的设置,用以进一步提高高帧数摄像机4-1的稳定性,可与实验台或其他类似目标物固定。
如图11所示,为一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统的功能流程图。飞行昆虫接触反力的测试过程如下陈述:首先将碳纤维弹簧及其移动控制组件1、测试系统底座及其照明组件2、有机玻璃罩及其标尺组件3、高帧数摄像机及其固定组件4等安放在测试系统底座2-7上。通过调平地脚螺栓2-6调节测试系统底座2-7的水平度,确保测试系统底座2-7绝对水平,然后将碳纤维弹簧1-1固定安装在扇形底座1-2上,检查有机玻璃罩安装卡槽2-5与有机玻璃罩3-4的配合;打开LED照明光源2-1,用以提升有机玻璃罩3-4内部的光亮度。通过步进电机控制器施加给步进电机1-7电信号,步进电机1-7带动滚珠丝杠1-12作旋转运动,滚珠丝杠1-12的螺距为1.0毫米,再带动扇形底座固定滑块1-9作水平移动,使碳纤维弹簧1-1穿过碳纤维弹簧安放方孔3-1,进入有机玻璃罩3-4内,使有机玻璃罩3-4内的碳纤维弹簧1-1的有效工作长度为50.0毫米;记录此时碳纤维弹簧1-1相对于碳纤维弹簧垂直定位标尺3-5在垂直方向上的距离信息,然后依据距离信息,参照高帧数摄像机垂直定位标尺3-7调节高帧数摄像机4-1镜头的中心在垂直方向上的距离,使碳纤维弹簧1-1和高帧数摄像机4-1镜头的中心在垂直方向上的距离一致。打开飞行昆虫投放方孔挡板3-8,将苍蝇投放至有机玻璃罩3-4内,然后迅速关闭飞行昆虫投放方孔挡板3-8,以防止苍蝇飞离有机玻璃罩3-4。飞行昆虫在无干扰状态下(不影响昆虫的生理活性)降落至碳纤维弹簧1-1或从碳纤维弹簧1-1起飞时,会使碳纤维弹簧1-1产生挠度,此时高帧数摄像机4-1对整个过程进行高清视频记录,对所记录的视频转换成图片,并导入到已获登记的软件著作权“仿生原型微形貌结构挠度求解系统(登记号:2020SR0755088)”中;然后通过位置与挠度信息参考标尺3-6获取位置数据和挠度数据,分别为41.05毫米和7.76毫米;碳纤维弹簧1-1的特性方程,即位置-挠度-力方程
其中:
- 一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统
- 一种测试过程无干扰的微牛级飞行昆虫接触反力测试系统