一种基于指数趋近律滑模控制的牵引网低频振荡抑制方法
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及电气化铁路系统技术领域,具体涉及一种基于指数趋近律滑模控制的牵引网低频振荡抑制方法。
背景技术
近年来,电气化铁路低频振荡现象频繁发生,振荡频率主要集中在3-7Hz,并大多发生在同一牵引供电段内多台同型号动车组同时升弓整备时刻,导致动车组牵引封锁,严重威胁着电气化铁路系统的安全稳定运行,电气化铁路低频振荡已成为车网之间典型的电气耦合性问题。为防止低频振荡再次发生,研究其抑制措施已迫在眉睫。
在分析低频振荡机理方面,目前许多专家学者针对车网低频振荡机理进行了研究,广泛认为车与网之间的电气量参数不匹配是低频振荡现象发生的直接原因。研究表明低频振荡机理是由于牵引网与动车组控制系统之间的电气参数不匹配造成的。为抑制低频振荡的发生,可改变牵引网或动车组电气参数。然而改变牵引网侧的参数存在一定的难度且不经济,改善动车组的电气参数成为抑制低频振荡的主要手段。有研究表明车网耦合系统系统低频振荡现象主要是由采用线性PI控制器控制网侧整流器这类非线性、多变量强耦合系统造成的。有研究提出了将原控制中的线性PI控制器替换为非线性控制,如:自适应自抗扰控制、预测控制以及滑模控制等,非线性控制器相比PI控制器具有更好的非线性控制特性,不受工况参数影响,改善了系统动、静态特性。
目前滑模控制已应用在AC-DC整流器、DC-DC变换器和DC-AC逆变器中,结果表明对于电力电子系统滑模控制较于线性PI控制具有较好的动、静态性能。
发明内容
本发明的目的在于提供一种基于指数趋近律滑模控制的牵引网低频振荡抑制方法,同时较好地解决了线性PI控制器响应速度慢和超调量较大的问题,良好的跟踪品质和鲁棒特性,并引入指数趋近律消除滑模控制本身的抖振问题,确保其状态变量在有限时间内平滑地到达滑模面,提高系统控制品质。最后,通过仿真验证了基于指数趋近律滑模控制器对比线性PI控制器,更加具有更好的动、静态性能,并证明了该控制方法能有效地抑制牵引网低频振荡。
本发明的目的可以通过以下技术方案实现:
一种基于指数趋近律滑模控制的牵引网低频振荡抑制方法,包括以下步骤:
步骤一:创建电压滑模控制模型,引进指数趋近律,选取直流侧输出电压的误差作为滑模面;
步骤二:通过Lyapunov函数对步骤一中创建的电压滑模控制模型的渐近稳定性进行证明;
步骤三:创建电流内环控制器;
步骤四:创建基于指数趋近律滑模控制器。
作为本发明进一步的方案:步骤一中滑模面的选定:
选择udc为输出变量,设:
m
根据滑模变结构控制理论,结合整流器,选取滑模面:
式2中:β为滑模控制反馈系数;
由式1和式2得到:
系统稳定时,在dq系下,i
由动车组单相整流器拓扑结构得到整流器开关函数:
将式4代入式3,得到:
作为本发明进一步的方案:根据动车组单相整流器拓扑结构,得到状态方程为:
式6中,Ln和Rn分别为车载牵引变压器折算到二次侧的等效阻抗和电阻,C是直流侧支撑电容,R
其中,d1和d2分别表示桥臂1和桥臂2的开关状态;
令u
作为本发明进一步的方案:引入指数趋近律的滑模控制律;
选取指数趋近律:
s=-arctan|x|·ε·sgn(s)-ks (ε>0,k>0) 式8;
式8中:x表示系统控制的状态变量的误差,k为指数趋近项系数,为系统运动点趋近切换面的速度;
将指数趋近律应用于式5可得控制律:
作为本发明进一步的方案:步骤二中选取Lyapunov函数:
式10对时间t求导:
当s>0时,有:
当s<0时,有:
对于任意的s≠0,均有v<0,根据Lyapunov稳定性定理可知,该系统在有限时间内能到达滑模面,系统稳定在参考点u
作为本发明进一步的方案:步骤三中电流环控制器分别对id、iq解耦控制,K
其中,i
作为本发明进一步的方案:步骤四中基于指数趋近律滑模控制包括电压控制器、电流控制器、二阶广义积分器和锁相环。
本发明的有益效果:
本发明基于指数趋近律滑模控制的牵引网振荡抑制方法,较好地解决了线性PI控制器响应速度慢和超调量较大的问题,良好的跟踪品质和鲁棒特性,并引入指数趋近律消除滑模控制本身的抖振问题,确保其状态变量在有限时间内平滑地到达滑模面,提高系统控制品质,同时,通过仿真验证了基于指数趋近律滑模控制器对比线性PI控制器,更加具有更好的动、静态性能,并证明了该控制方法能有效地抑制牵引网低频振荡;
本发明将指数趋近律应用于电压外环的控制,不仅可以提高系统状态点趋向于滑模面的速度,增加系统动态响应,还可以有效防范系统状态点反复穿越于滑模面两侧,从而防止系统振动现象。
附图说明
下面结合附图对本发明作进一步的说明。
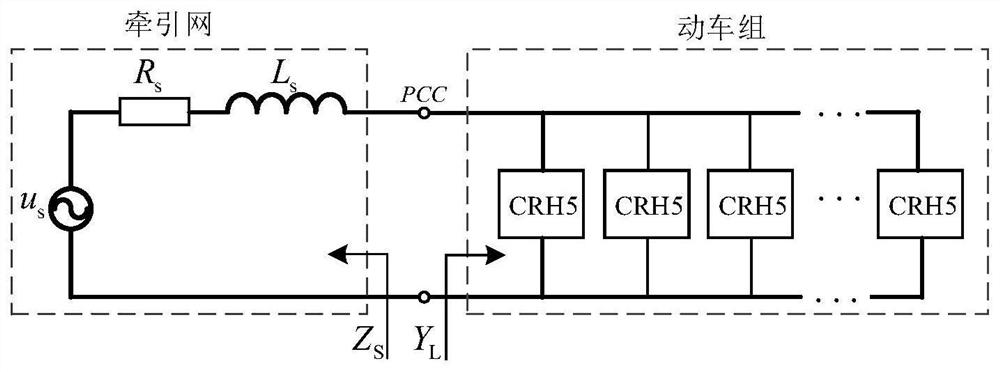
图1是本发明车网耦合系统的结构示意图;
图2是本发明CRH5型动车组牵引传动系统的结构示意图;
图3是本发明网侧整流器拓扑结构的结构示意图;
图4是本发明车网系统稳定性分析的结构示意图;
图5是基于线性PI电压环控制器DVC的结构示意图;
图6是基于线性PI电流环控制器ACC的结构示意图;
图7是本发明基于指数趋近律滑模控制策略的结构示意图;
图8是基于滑模控制电压环控制器DVC的结构示意图;
图9是基于滑模控制电流环控制器ACC的结构示意图;
图10是本发明基于指数趋近律滑模控制的动车组网侧整流器控制的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
参阅图1-图10,本发明为一种基于指数趋近律滑模控制的牵引网低频振荡抑制方法,包括以下步骤:
步骤一:创建电压滑模控制模型,引进指数趋近律,选取直流侧输出电压的误差作为滑模面;
步骤二:通过Lyapunov函数对步骤一中创建的电压滑模控制模型的渐近稳定性进行证明;
步骤三:创建电流内环控制器;
步骤四:创建基于指数趋近律滑模控制器。
其中:车网耦合系统低频振荡机理分析
以CRH5型动车组为研究对象,利用车网系统回比矩阵模型绘制幅频特性曲线揭示了低频振荡的产生机理,为其抑制方法的研究提供了理论支撑;
车网耦合系统回比矩阵模型
回比矩阵是分析多变量级联系统稳定性能的一种重要工具。将车网耦合系统可视为一个级联系统,分别建立牵引网输出阻抗模型Z
为简化分析,把牵引网等效为理想电压源u
Z
式(1)所示的牵引网输出阻抗为单输入单输出传递函数,将式(1)分解到dq系下,即
通过对动车组数学模型的推导,可以得到动车组侧的输入导纳Y
CRH5型动车组牵引传动系统结构如图2所示,首先对单个整流器输入导纳进行推导,进而得到多个整流器输入导纳模型。低频振荡发生时,动车组逆变器和电机还未工作,可将其等效为阻性负载,CRH5型动车组单相整流器拓扑结构如图3所示;
图3中:Ln和Rn分别为车载牵引变压器折算到二次侧的等效阻抗和电阻,C是直流侧支撑电容,R
根据图3的拓扑结构,可得到其状态方程:
其中,d
令u
将式(4)在静态工作点进行稳态值与小信号展开可得到式(5)。
式(5)中存在小信号的乘积项,这些项的存在体现了整流器系统非线性特性,忽略两个小信号值乘积的稳态值和无穷小值,得到式(6)dq系矩阵形式的小信号模型。
其中A、B、C为系数矩阵;
将式(6)拉普拉斯变换,可得:
其中I为3×3的单位矩阵,式(7)为单相PWM整流器的广义dq解耦小信号模型,其中
其中H
将式(8)代入式(7)可得单台整流器的dq系下的状态方程:
其中,F
单个整流器的输入导纳可以表示为:
由于每个动力单元均是两重化整流,则每个动力单元的输入导纳为2×Yin,一列动车组的输入导纳为2×5×Yin,则n列CRH5型动车组的输入导纳矩阵为
Y
多列CRH5型动车组输入导纳Y
根据Z
基于改进sum-范数判据的稳定性分析
为能有效分析车网耦合系统低频振荡机理,通过车网耦合系统回比矩阵模型,通过获得绘制相应的幅频特性曲线得到分析结果,其改进sum-范数判据为:
判据式由两个子判据并集组成,当任一子判据幅频特性曲线在0dB线以下时,则该级联系统是稳定的;
在某一频率范围内,当两子判据幅频特性曲线同时在0dB线以上时,该级联系统是不稳定的;
通过调整式(11)中动车组的台数n来绘制不同工况的幅频特性曲线。
图4中的(a)为5列动车组同时投入,任一子判据始终在0dB线以下,此时系统处于稳定状态,图4中的(b)为6列动车组同时投入,两子判据均在0dB线以上,曲线在频率为769rad/s时,峰值为1.47dB,由判据可知,此时系统处于不稳定状态,图4中的(c)为7列动车组同时投入,两条曲线在一定频率段内,远在0dB线以上,此时系统已处于失稳的状态;
当改变系统的回比矩阵中任何一个参数时,均会对整个系统的稳定性造成影响,若此时存在动车组的投入,系统发生低频振荡几率较大,分析可知,车网耦合低频振荡主要与牵引网侧的等效阻抗和动车组侧的等效导纳有关。
因此,抑制低频振荡的发生,可改变牵引网侧的等效阻抗和动车组侧的等效导纳,改变牵引网侧的等效阻抗存在一定的难度,且不符合经济性的原则,从而本方案以改善动车组侧的等效导纳为目标,通过优化动车组网侧整流器的控制策略来增强系统稳定性,达到抑制低频振荡的目的。
根据滑模控制的基本思想,提出了将原电压控制环的线性PI控制器替换滑模控制器,实现对低频振荡抑制;
电压滑模控制器的设计
电压滑模控制器设计目标是实现直流侧电压跟踪,同时提供电流控制环参考值。主要的设计内容:1)依据系统的动态要求,选定适当的滑模面;2)引进指数趋近律,保证滑动模态可以稳定到达,为使系统具有较好的动态性能,选取直流侧输出电压的误差作为滑模面;
滑模面的选择
选择u
m
根据滑模变结构控制理论,结合整流器,选取滑模面:
式中:β为滑模控制反馈系数,根据滑模控制理论,系统响应速度与β取值有关。
由式(15)、(16)可以得到
当系统稳定时,在dq系下,i
将式(18)代入式(17),可以得到
基于指数趋近律的滑模控制律
为了削弱滑模系统抖振,改善到达段的运动效果,选取指数趋近律:
s=-arctan|x|·ε·sgn(s)-ks (ε>0,k>0) 式(20)
式中,x表示系统控制的状态变量的误差,k为指数趋近项系数,ε为系统运动点趋近切换面的速度,根据上式(20),若状态点在滑模面之外时,此时的状态误差变量x较大,受到指数趋近项-ks和变速趋近项-arctan|x|·ε·sgn(s)的共同驱动,状态点在滑模面收敛,且具有较大的趋近速度;状态点抵近滑模面时,指数趋近项-ks的速率趋近于0,变速趋近项-arctan|x|·ε·sgn(s)担负着主要作用,在系统趋近于稳态时,状态变量x趋近于0,受到趋近律的影响,系统状态点将会沿着切换面趋向于平衡点,在此过程中,变速趋近项系数arctan|x|处于递减态势,在状态点运动到平衡点时,趋近项系数arctan|x|同步降低为0,系统失去了引发抖动的原因。
因此,将指数趋近律应用于电压外环的控制,不仅可以提高系统状态点趋向于滑模面的速度,增加系统动态响应,还可以有效防范系统状态点反复穿越于滑模面两侧,从而防止系统振动现象。
将指数趋近律应用于式(19)可得控制律:
电压滑模控制器的结构框图如图5所示,稳定性分析:
为了证明所设计的电压滑模控制器具有渐近稳定性,选取Lyapunov函数进行证明,选取Lyapunov函数:
式(22)对时间t求导:
当s>0时,有:
当s<0时,有:
对于任意的s≠0,均有v<0,根据Lyapunov稳定性定理可知,该系统在有限时间内能到达滑模面,系统稳定在参考点u
电流内环控制器的设计
电流控制器框图如图9所示,分别对id、iq解耦控制,K
其中,i
基于指数趋近律滑模控制的动车组网侧整流器控制结构如图7所示方法,主要由四部分组成:电压控制器、电流控制器、二阶广义积分器和锁相环。
在动车组同时升弓整备时,系统实际输出与预设值之间存在一定差距,导致系统误差很大,对系统的初始冲击也很大,为缓解此现象,电压外环利用滑模控制器,可使直流侧输出电压在“滑动模态”下沿设定的状态轨迹作小幅度、高频率的上下运动平滑的过渡过程,其次,这种滑动模态与系统的参数及扰动无关,使得控制具有快速响应、对参数变化及扰动不灵敏,使系统具有更强的鲁棒性,实现随着系统误差大小的变化而变化。通过电压外环DVC控制器环节保证了直流侧电压的稳定,电流内环dq解耦控制实现网侧电压电流单位功率因数,实现对动车组网侧整流器的控制;
综上,本发明的基于指数趋近律滑模控制的牵引网振荡抑制方法,较好地解决了线性PI控制器响应速度慢和超调量较大的问题,良好的跟踪品质和鲁棒特性,并考虑到滑模控制本身存在的抖振现象,确保其状态变量在有限时间内平滑地到达滑模面,提高系统控制品质。
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。