一种商用车AMT自动起步控制方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及变速器控制技术领域,尤其涉及一种商用车AMT自动起步控制方法。
背景技术
根据市场研究分析,国内AMT产品市场已进入快速发展期,与此同时,司机对重型卡车的驾驶性要求也越来越高。重型卡车使用环境一般比较恶劣,在建筑工地、配货站及城市堵车等工况,需要车辆低速行驶,司机频繁操作油门及刹车且车速很难控制,易使驾驶员疲劳,为了增强车辆操控性能,开发自动起步功能以达到减轻驾驶疲劳强度。但是目前市场上很多AMT商用车无此功能或此功能还存在以下问题:
1、自动起步工况整车动力响应慢、起步冲击,在车辆遇到较大行驶阻力工况时,易造成发动机熄火、发动机转速“掉坑”后,触发发动机防熄火策略,扭矩快速增加,车辆前冲,存在安全隐患;
2、自动起步功能没有根据发动机水温、海拔等因素进行对发动机请求转速修正,发动机怠速带扭能力差,频繁触发离合器分离,造成车辆“游车”现象,驾驶感受很差。
发明内容
本发明提出一种提出了一种商用车AMT自动起步控制方法,通过整车控制系统、变速器控制系统、发动机控制系统及手柄控制系统协同控制,使车辆在D/R挡位时,松开脚刹,不踩油门,变速器控制系统控制离合器会自动接合,整车低速稳定行驶,当车辆遇到大坡道等其它行驶阻力较大的恶劣工况时,为避免发动机熄火风险,实时调整离合器接合深度,保证车辆自动起步工况的动力响应性和行驶平顺性,增强驾驶员操控性能。
为了解决上述背景技术中的问题,本发明是通过以下技术方案来实现的:
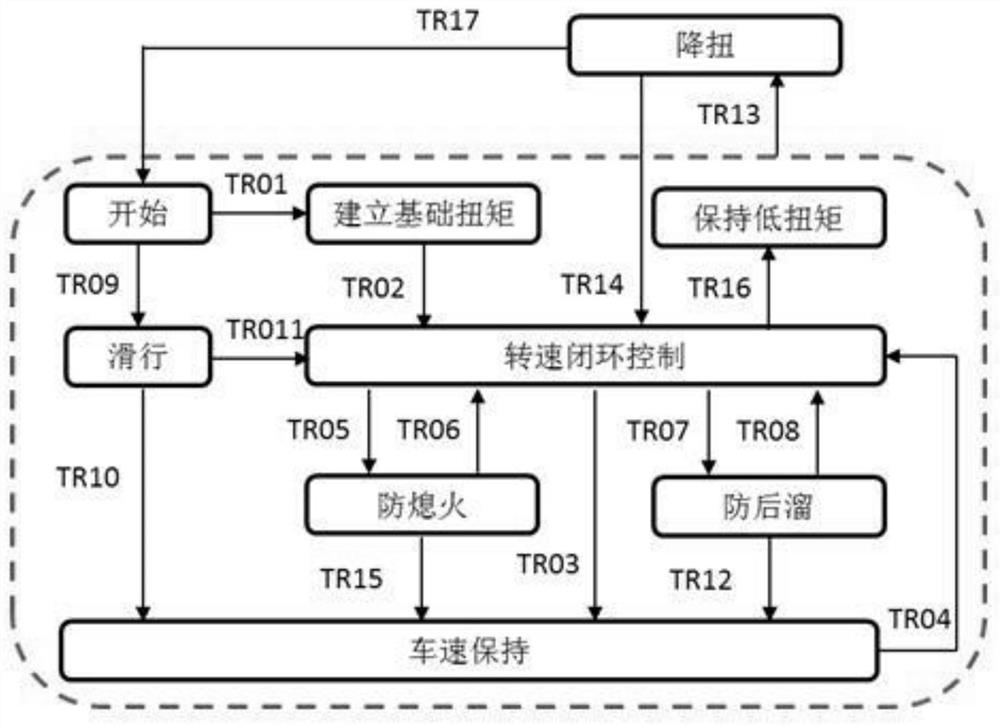
一种商用车AMT自动起步控制方法,包括控制状态模型;所述控制状态模型包括:
S1、系统初始化状态:计算车辆状态,判断车辆进入自动起步前的状态是静止或高速滑行;
S2、建立基础扭矩:离合器请求扭矩按一定斜率增加至半接合点扭矩,在此过程中,不能感受到整车抖动;
S3、转速PID控制:通过变速器输入轴转速与发动机目标怠速差计算离合器闭环部分请求扭矩;
S4、车速保持:当输入轴转速满足目标发动机转速后进入此状态,保持离合器扭矩,同时监控变速器输入轴转速与发动机目标怠速的差值,当差值超过标定阈值后激活转速PID控制状态;
S5、防熄火:当发动机转速下降速率大于标定阈值后,降低离合器接合斜率或保持,当发动机转速恢复至目标值后,此状态跳转至转速PID控制状态;
S6、保持低扭矩:当离合器扭矩增加至最大扭矩,但车辆维持不动达到标定所保持时间后,此状态被激活;坡道工况易于被触发,因为轮端摩擦力反向,可以降低离合器扭矩,减小摩擦功,但是车辆不能出现后溜,此状态离合器一直处于滑摩状态,为了保护离合器,假如驾驶员不踩刹车,保持一段时间后要强制退出;
S7、后溜:当系统检测到挡位车速方向相反时激活此状态,按一定斜率增加离合器扭矩;
S8、滑行:当车辆高车速滑行至一定车速后,此状态被激活,若果车速满足目标车速,则保持此状态;
S9、降扭:当系统检测到刹车信号触发后,此状态被激活,离合器扭矩降低至最小扭矩。
优选的,所述控制状态模型的跳转条件为:
TR01:离合器扭矩小于自动起步正常离合器扭矩值,从S1跳转至S2;
TR02:离合器扭矩不小于半接合点扭矩值,从S2跳转至S3;
TR03:变速器输入轴转速与发动机目标怠速已同步且离合器扭矩不小于自动起步正常离合器扭矩值,从S3跳转至S4;
TR04:变速器实际输入轴转速与目标发动机转速大于标定阈值,从S4跳转至S3;
TR05:发动机转速小于标定阈值,从S3跳转至S5;
TR06:发动机转速大于标定阈值,从S5跳转至S3;
TR07:变速器档位与车速方向相反,从S3跳转至S7;
TR08:车辆停止或变速器档位与车速方向一致,从S7跳转至S3;
TR09:离合器扭矩不小于自动起步正常扭矩值,从S1跳转至S8;
TR10:变速器输入轴转速与发动机目标怠速已同步且离合器扭矩不小于自动起步正常离合器扭矩值,从S8跳转至S4;
TR11:变速器实际输入轴转速与目标发动机转速大于标定阈值且离合器扭矩小于自动起步正常扭矩值,从S8跳转至S3;
TR12:变速器实际输入轴转速与目标发动机转速大于标定阈值且离合器扭矩小于自动起步正常扭矩值,从S3跳转至S7,并从S7跳转至S4;
TR13:系统检测到刹车信号触发,此条件优先级最高,无论系统当前处于任何状态,当检测到此条件成立时,均跳转到降扭状态,从S1跳转至S9;
TR14:离合器扭矩不小于半接合点扭矩值,从S9跳转至S3;
TR15:变速器输入轴转速与发动机目标怠速已同步且离合器扭矩不小于自动起步正常离合器扭矩值,从S3跳转至S5,并从S5跳转至S4;
TR16:离合器扭矩增加至最大扭矩,但车辆维持不动达到标定所保持时间,从S4跳转至S3,并从S3跳转至S6;
TR17:离合器扭矩小于自动起步最小扭矩值,从S1跳转至S9,并从S9返回S1。
优选的,所述S3离合器闭环部分请求扭矩=上一周期离合器请求扭矩+离合器闭环部分计算扭矩
所述离合器闭环部分计算扭矩包括参考转速、目标转速、转速差及转速差变化率计算;所述参考转速为发动机目标怠速;所述目标转速初始值为零,按一定斜率增加至参考转速;所述比例部分及积分部分转速差=目标转速-实际输入轴转速;所述微分部分转速差变化率=(目标转速-上周期目标转速)-(当前输入轴转速-上周期输入轴转速);当转速百分比超过100%或接近0%时,设置斜率尽量小,减少可能的离合器同步的冲击,所述转速百分比=(当前转速×100)÷目标转速。
优选的,所述S7后溜状态为通过变速器输出轴转速传感器对车速方向进行识别。
优选的,还包括怠速补偿状态控制;当海拔较高及发动机水温较低时,发动机怠速带扭能力较弱,同时考虑发动机附件功率以及车辆刚起动时的阻力,综合以上因素,标定合适的发动机怠速补偿值,提高发动机怠速带扭能力。
与现有技术相比,本发明具有以下有益的技术效果:
通过整车控制系统、变速器控制系统、发动机控制系统及手柄控制系统协同控制,使车辆在D/R挡位时,松开脚刹,不踩油门,变速器控制系统控制离合器会自动接合,整车低速稳定行驶,当车辆遇到大坡道等其它行驶阻力较大的恶劣工况时,为避免发动机熄火风险,实时调整离合器接合深度,保证车辆自动起步工况的动力响应性和行驶平顺性,增强驾驶员操控性能。
附图说明
图1为本发明的自动起步功能控制系统架构框架图;
图2为本发明的PID计算转速关系图;
图3为本发明的转速百分比计算图;
图4为本发明的自动起步功能发动机怠速补偿原理框架图。
具体实施方式
实施例1
如图1至图3所示,一种商用车AMT自动起步控制方法,包括控制状态模型;控制状态模型包括:
S1、系统初始化状态:计算车辆状态,判断车辆进入自动起步前的状态是静止或高速滑行;
S2、建立基础扭矩:离合器请求扭矩按一定斜率增加至半接合点扭矩,在此过程中,不能感受到整车抖动;
S3、转速PID控制:通过变速器输入轴转速与发动机目标怠速差计算离合器闭环部分请求扭矩;
S4、车速保持:当输入轴转速满足目标发动机转速后进入此状态,保持离合器扭矩,同时监控变速器输入轴转速与发动机目标怠速的差值,当差值超过标定阈值后激活转速PID控制状态;
S5、防熄火:当发动机转速下降速率大于标定阈值后,降低离合器接合斜率或保持,当发动机转速恢复至目标值后,此状态跳转至转速PID控制状态;
S6、保持低扭矩:当离合器扭矩增加至最大扭矩,但车辆维持不动达到标定所保持时间后,此状态被激活;坡道工况易于被触发,因为轮端摩擦力反向,可以降低离合器扭矩,减小摩擦功,但是车辆不能出现后溜,此状态离合器一直处于滑摩状态,为了保护离合器,假如驾驶员不踩刹车,保持一段时间后要强制退出;
S7、后溜:当系统检测到挡位车速方向相反时激活此状态,按一定斜率增加离合器扭矩;
S8、滑行:当车辆高车速滑行至一定车速后,此状态被激活,若果车速满足目标车速,则保持此状态;
S9、降扭:当系统检测到刹车信号触发后,此状态被激活,离合器扭矩降低至最小扭矩。
控制状态模型的跳转条件为:
TR01:离合器扭矩小于自动起步正常离合器扭矩值,从S1跳转至S2;
TR02:离合器扭矩不小于半接合点扭矩值,从S2跳转至S3;
TR03:变速器输入轴转速与发动机目标怠速已同步且离合器扭矩不小于自动起步正常离合器扭矩值,从S3跳转至S4;
TR04:变速器实际输入轴转速与目标发动机转速大于标定阈值,从S4跳转至S3;
TR05:发动机转速小于标定阈值,从S3跳转至S5;
TR06:发动机转速大于标定阈值,从S5跳转至S3;
TR07:变速器档位与车速方向相反,从S3跳转至S7;
TR08:车辆停止或变速器档位与车速方向一致,从S7跳转至S3;
TR09:离合器扭矩不小于自动起步正常扭矩值,从S1跳转至S8;
TR10:变速器输入轴转速与发动机目标怠速已同步且离合器扭矩不小于自动起步正常离合器扭矩值,从S8跳转至S4;
TR11:变速器实际输入轴转速与目标发动机转速大于标定阈值且离合器扭矩小于自动起步正常扭矩值,从S8跳转至S3;
TR12:变速器实际输入轴转速与目标发动机转速大于标定阈值且离合器扭矩小于自动起步正常扭矩值,从S3跳转至S7,并从S7跳转至S4;
TR13:系统检测到刹车信号触发,此条件优先级最高,无论系统当前处于任何状态,当检测到此条件成立时,均跳转到降扭状态,从S1跳转至S9;
TR14:离合器扭矩不小于半接合点扭矩值,从S9跳转至S3;
TR15:变速器输入轴转速与发动机目标怠速已同步且离合器扭矩不小于自动起步正常离合器扭矩值,从S3跳转至S5,并从S5跳转至S4;
TR16:离合器扭矩增加至最大扭矩,但车辆维持不动达到标定所保持时间,从S4跳转至S3,并从S3跳转至S6;
TR17:离合器扭矩小于自动起步最小扭矩值,从S1跳转至S9,并从S9返回S1
S3离合器闭环部分请求扭矩=上一周期离合器请求扭矩+离合器闭环部分计算扭矩
离合器闭环部分计算扭矩包括参考转速、目标转速、转速差及转速差变化率计算;参考转速为发动机目标怠速;目标转速初始值为零,按一定斜率增加至参考转速;比例部分及积分部分转速差=目标转速-实际输入轴转速;微分部分转速差变化率=(目标转速-上周期目标转速)-(当前输入轴转速-上周期输入轴转速);当转速百分比超过100%或接近0%时,设置斜率尽量小,减少可能的离合器同步的冲击,转速百分比=(当前转速×100)÷目标转速。
S7后溜状态为通过变速器输出轴转速传感器对车速方向进行识别。
实施例2
还包括怠速补偿状态控制;当海拔较高及发动机水温较低时,发动机怠速带扭能力较弱,同时考虑发动机附件功率以及车辆刚起动时的阻力,综合以上因素,标定合适的发动机怠速补偿值,提高发动机怠速带扭能力。