轮鳍复合式越障机器人
文献发布时间:2023-06-19 18:30:43
技术领域
本发明主要涉及到机器人技术领域,特指一种轮鳍复合式越障机器人。
背景技术
目前,业内已经出现了若干不同种类和类型的地面无人平台系统,按照机器人的工作原理和设计思想,可大致分为四类,即轮式机器人、履带式机器人、腿式机器人和复合式机器人,这些机器人在侦察、巡视、警戒、扫雷排险等危险与恶劣环境中有着广阔的应用前景。其中,每种类别的机器人各具特点,其适用范围也不尽一致。
轮式机器人在民用、航空和军事等各方面都有突出表现,具有机构简单、驱动和控制相对方便、行走灵活、工作效率高等优点,但是越障能力和地形适应能力不强,适合在相对平坦路面行驶。
履带式机器人因其较强的越障能力,在军事领域应用广泛,履带式机器人与地面接触面积大,牵引和附着性能好,具有较强的地形适应能力,在陡峭地形、复杂条件下有着较高的越障能力和良好的环境适应性,但其速度相对较低,在长距离、高速度运动过程中或者是转弯时其能耗很高。
腿足式机器人虽能够满足某些特殊的性能要求,能适应复杂的地形,但由于其机构复杂,要想实现稳定高速的行走还有诸多难题需要解决。
复合式机器人可以有效的结合轮式运动速度快、效率高,履带式稳定性好、越障性强、腿式灵活性好等优点来提高机器人的综合性能。
由上可知,在地面移动机器人家族中,履带机器人具有强大的地形适应性,能够适应恶劣的路面条件,因此得到了广泛的应用。四轮运动平台可充分发挥轮式运动速度高、功耗低的优点,适合在较平坦的路面上快速进入目标地点。关节式履带机器人主要用于危险环境的侦察工作,在一定条件下该机器人能够通过台阶、壕沟、凸台、楼梯等多种障碍。静力平衡状态下,当机体重量、台阶高度及摩擦系数相同时,移动载体的车轮直径较大时比较容易爬上台阶。但是由于尺寸以及电机输出功率的限制,不可能无限加大车轮直径。
发明内容
本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种结构简单、运动模式多样化且易切换、具有全地形的穿越能力的轮鳍复合式越障机器人。
为解决上述技术问题,本发明采用以下技术方案:
一种轮鳍复合式越障机器人,包括车架、鳍臂系统、行走机构、传动系统、控制器件箱、机械臂及动力装置,所述车架作为鳍臂系统、行走机构、传动系统的载体,前鳍摆臂和后鳍摆臂分布在车架前后;所述动力装置包括车架前部安装的两个履带驱动电机、一个控制摆臂的前鳍电机、车架后方安装的两个后轮电机、控制后鳍摆动的后鳍电机。
作为本发明的进一步改进:所述车架由铝方管焊接而成,所述车架上设置有加强筋,采用三角形斜杆的形式对车架的刚度进行加强。
作为本发明的进一步改进:所述电机通过电机座与车架连接,通过轴承座安装驱动轴。
作为本发明的进一步改进:所述前鳍摆臂组件包括全向轮、全向轮安装板、履带、前鳍轴、履带驱动轮、支撑轮、前鳍板及张紧轮;所述全向轮通过全向轮安装板固定在履带驱动轮上,通过前鳍轴的旋转控制全向轮支撑地面或者悬空,从而切换运动模式。
作为本发明的进一步改进:所述履带驱动轮通过履带驱动轴上的花键连接,从而带动履带的转动。
作为本发明的进一步改进:所述支撑轮用于支撑张紧履带,所述张紧轮采用固定张紧的方式,通过张紧片安装在前鳍板上。
作为本发明的进一步改进:所述后鳍摆臂组件包括两段夹角为30°的碳纤维板连接而成,中部安装有后鳍中轮,远端安装棘轮,两侧摆臂通过中部碳纤维管与后鳍连接杆连接为一个整体。
作为本发明的进一步改进:所述机器人传动系统包括四个轮电机和两个鳍电机;所述履带驱动电机通过履带驱动齿轮将动力传递至履带驱动轴上,从而带动履带驱动齿轮转动,履带旋转;所述后轮电机通过后轮传动齿轮15带动后轮轴转动,使后轮旋转。
作为本发明的进一步改进:所述前鳍摆臂系统包括前鳍、前鳍板、前鳍蜗轮蜗杆减速器及前鳍电机,所述前鳍电机通过前鳍蜗轮蜗杆减速器传递力矩到前鳍板上,从而带动前鳍转动,完成模式切换的功能。
作为本发明的进一步改进:所述后鳍摆臂系统包括后鳍、后鳍电机、后鳍蜗轮蜗杆减速器及后鳍轴,通过所述后鳍电机与蜗轮蜗杆减速器,使后鳍轴旋转,从而摆动安装其上的后鳍。
作为本发明的进一步改进:当通过控制前鳍电机使前鳍摆动,全向轮将机器人整体撑起来,位于车架前部的全向轮为从动轮,后轮为主动轮,进行高速运动,此时为轮式运动模式;当通过控制前鳍电机使前鳍摆动,将履带全部贴于地面之上,将机器人撑起后轮不起支撑作用,此时为履带式运动模式;通过控制前鳍电机使前鳍摆动,使前鳍摆向前,提高机器人的越障能力,此时为轮履结合模式;通过前鳍与后鳍协调,使机器人重心缓慢调整,为爬行模式。
与现有技术相比,本发明的优点就在于:
1、本发明的轮鳍复合式越障机器人,为一种可以实现轮式、履带式和轮履式相互转换的轮鳍复合式多运动模式机器人;本发明具有全地形的穿越能力,同时还能达到较高的速度要求。该机器人具有体积小、重量轻的优点,可根据地形特点变换运动模态,选择最佳行进方式,在平坦地面使用四轮模式行进以提高行进速度效率,在松软崎岖地面使用履带模式行进提高平台通过性能,利用前后鳍摆臂使机器人具备较好的越障能力。
2、本发明的轮鳍复合式越障机器人,为一种适合全地形越障的小型轮鳍复合式机器人,融合轮式、履带式和腿足式机器人的优点,能够根据地形特点变换运动模态,选择最佳行进模式,采用四轮模式实现高速运动,轮履结合式提高越障性能。
3、本发明的轮鳍复合式越障机器人,机器人采用前摆臂的结构加大了车轮的有效直径,减小了机器人的体积,提高了越障能力。后摆臂机构可避免机器人跨越障碍时的摔落,增加其稳定性,进一步提高其越障能力。
附图说明
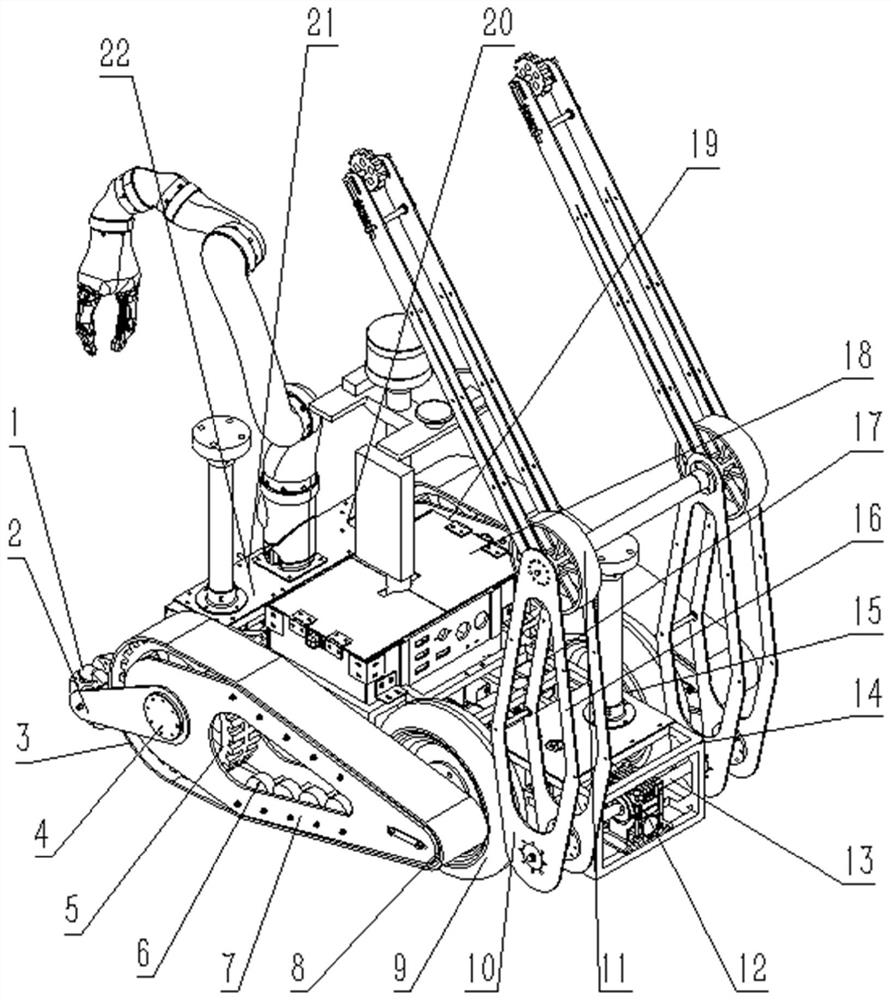
图1是本发明机器人整体结构的轴侧示意图。
图2是本发明机器人整体结构的俯视示意图。
图3是本发明在具体应用实例中前鳍机构的结构原理示意图。
图4是本发明在具体应用实例中后鳍机构的结构原理示意图。
图5是本发明在具体应用实例中传动机构的结构原理示意图。
图例说明:
1、全向轮;2、全向轮板;3、履带;4、前鳍轴;5、履带驱动轮;6、支撑轮;7、前鳍板;8、张紧轮;9、后轮;10、后鳍;11、后鳍中轮;12、后鳍蜗轮蜗杆减速器;13、后鳍轴;14、车架;15、后轮传动齿轮;16、后轮轴;17、后轮电机;18、控制器件箱;19、履带驱动齿轮;20、履带驱动轴;21、机械臂;22、履带驱动电机;23、前鳍;24、前鳍蜗轮蜗杆减速器;25、前鳍电机;26、后鳍电机;27、后鳍棘轮;28、后鳍连接杆。
具体实施方式
以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
如图1-图5所示,本发明的轮鳍复合式越障机器人,包括车架14、鳍臂系统、行走机构、传动系统、控制器件箱、机械臂及动力装置,车架14是鳍臂系统、行走机构、传动系统的载体,前鳍摆臂和后鳍摆臂分布在车架前后;动力装置包括车架前部安装的两个履带驱动电机22、一个控制摆臂的前鳍电机25、车架后方安装的两个后轮电机17、控制后鳍摆动的后鳍电机26。
在具体应用实例中,车架14由铝方管焊接而成,重量较轻。在车架容易受力变形的位置,加装加强筋,采用三角形斜杆的形式对车架的刚度进行加强。电机通过电机座与车架连接,通过轴承座安装驱动轴。
在具体应用实例中,所述前鳍摆臂组件包括全向轮1、全向轮安装板2、履带3、前鳍轴4、履带驱动轮5、支撑轮6、前鳍板7及张紧轮8。所述全向轮1通过全向轮安装板2固定在履带驱动轮5上,通过前鳍轴4的旋转控制全向轮1支撑地面或者悬空,从而切换运动模式。所述履带驱动轮5通过履带驱动轴20上的花键连接,从而带动履带3的转动。支撑轮6用于支撑张紧履带3,张紧轮8采用固定张紧的方式,通过张紧片安装在前鳍板7上。
在具体应用实例中,所述后鳍摆臂组件包括两段夹角为30°的碳纤维板连接而成,中部安装有后鳍中轮11,远端安装棘轮27,两侧摆臂通过中部碳纤维管与后鳍连接杆28连接为一个整体。
在具体应用实例中,机器人传动系统包括四个轮电机和两个鳍电机。履带驱动电机22通过履带驱动齿轮19将动力传递至履带驱动轴20上,从而带动履带驱动齿轮19转动,履带3旋转。后轮电机17通过后轮传动齿轮15带动后轮轴16转动,从而使后轮9旋转。
在具体应用实例中,前鳍摆臂系统包括前鳍23、前鳍板7、前鳍蜗轮蜗杆减速器24及前鳍电机25,前鳍电机25通过前鳍蜗轮蜗杆减速器24传递力矩到前鳍板7上,从而带动前鳍23转动,从而达到模式切换的功能。
在具体应用实例中,后鳍摆臂系统包括后鳍10、后鳍电机26、后鳍蜗轮蜗杆减速器12及后鳍轴13,通过所述后鳍电机26与蜗轮蜗杆减速器12,使后鳍轴13旋转,从而摆动安装其上的后鳍10。
本发明在具体应用时,工作模式包括:
当机器人在平坦地面上行驶时,通过控制前鳍电机25使前鳍23摆动,全向轮1将机器人整体撑起来,此时位于车架14前部的全向轮1为从动轮,后轮9为主动轮,进行高速运动,此时为轮式运动模式。
当机器人在松软沙地、碎石地上行进时,通过控制前鳍电机25使前鳍23摆动,将履带3全部贴于地面之上,将机器人撑起后轮9不起支撑作用,此时为履带式运动模式。
当机器人在土质崎岖环境中行进时,通过控制前鳍电机25使前鳍23摆动,使前鳍23摆向前,提高机器人的越障能力,此时为轮履结合模式。
当机器人从较高障碍上爬下时,通过前鳍23与后鳍10协调,可以使机器人重心缓慢下移,控制后鳍电机26将后鳍摆臂放下使后鳍棘轮27接触地面,通过摆动前鳍23和后鳍10使重心下移,后鳍中轮11接触地面从而实现下高台的功能。
当机器人攀爬障碍为重心上移的过程,与下高台过程相反。
本发明在结构上简单紧凑,采用模块化小型化轻量化设计,具有适应多种地形的越障能力,并根据环境进行模式转换,很好的协调了高速高效与高通过性。本发明采用模块化的设计思想开展机器人的详细结构设计,将机器人分为多个模块,分别展开设计,采用轮鳍复合式行走方案,使机器人具有三种运动模式,并使用前后鳍臂提高平台越障性能。实现了地面越障机器人的小型化、轻量化和高机动能力,融合了多种运动模式的优点,使机器人具有较高的环境适应性。
本发明的机器人整体采用模块化设计的思想,车架的整体设计主要考虑行走机构、控制器件箱、传动系统和鳍臂的安装位置。考虑机器人总体重量要求,车架采用3mm厚度的铝方管焊接而成,重量较轻。在车架14容易受力变形的位置,加装加强筋,采用三角形斜杆的形式对车架14的刚度进行加强。为了减少越障过程中对底盘的损坏,机器人采用增高底盘和鳍臂支撑的策略。通过增大驱动轮的尺寸,同时尽量将驱动轴安装在靠下位置,从而相对抬升机器人的底盘高度。机器人的前后摆臂系统也能够在底盘高度不够的情况下,支撑地面从而将车体抬起越过障碍。
在本发明中,控制器件箱的设计为了便于调试机器人控制器件载荷,将所有使用到的控制器件放置在控制箱内。在维修调试的过程中,控制器件箱可以单独拆卸,与机械部分同时维修调试,从而减少调试时间。因控制器件箱承受主要为控制器件的重量,对强度和刚度要求不高,为了减轻机器人重量,控制器件箱采用3mm厚的碳纤维板和铝连接件拼接而成。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。