一种新型水下半主动式扑翼能量采集装置
文献发布时间:2024-01-17 01:13:28
技术领域
本发明属于工程和技术研究以及试验发展技术领域,特别涉及一种新型水下半主动式扑翼能量采集装置。
背景技术
传统能源所造成的温室效应和环境污染问题等日益突出,可再生清洁能源引起了人们的广泛关注。提倡绿色环保无污染成为当今世界发展的主题。风能和洋流能作为清洁的可再生能源,由于蕴含量巨大且便于大规模开发利用,日益受到各国的欢迎和重视。
自然界中鸟类和海洋生物通过控制翅膀以及鳍的运动可以有效采集流场中的能量,来实现高效的飞行或游动。而在实际工程中,同样可以通过合理地利用扑翼振荡对风能和洋流能进行高效采集。沉浮俯仰耦合振荡扑翼装置的空间和地域适应性强,对环境的负面影响小,在采集分散度大且品质较低的能量方面具有显著优势。
目前扑翼能量采集装置多采用单自由度运动机制,结构较为复杂,传动过程中能量损失较大,能量采集效率低,并且大多在空气中运行,变工况范围有限,适用性差,对水流资源的利用也很少。此外,结构复杂还带来了加工安装的难度,长期运行的稳定性差,维护成本较高。
发明内容
本发明的目的在于提供一种新型水下半主动式扑翼能量采集装置,通过直线轴承、皮带轮和发电机实现扑翼沉浮方向被动直线运动的能量采集,通过步进电机主动控制扑翼在极限位置处改变俯仰角度,从而实现能量的连续采集。该装置结构简单易行,且充分考虑水下工作环境,可为提升扑翼能量采集性能提供新的技术途径。
为达到上述目的,本发明采用以下技术方案:
一种新型水下半主动式扑翼能量采集装置,包括沉浮自由度运动结构、俯仰自由度运动结构、传动输出结构以及控制系统;
所述沉浮自由度运动结构包括滑块模组、直线轴承、光轴导轨、顶板和底板,滑块模组内置两个直线轴承与光轴导轨配合实现支撑滑动,光轴导轨与顶板和底板通过螺纹连接;
所述俯仰自由度运动结构,包括步进电机和扑翼,通过控制步进电机转过预设角度,使连接于轴上的扑翼实现俯仰自由度运动;
所述传动输出结构包括皮带、皮带轮、轴承、轴承座以及发电机,皮带轮和发电机均通过轴承与轴承座固定在顶板或底板上;扑翼通过调整俯仰角度,在来流的驱动下实现沉浮运动,带动滑块模组同步运动,滑块模组内部穿有皮带,其中皮带一侧与滑块模组固结,保证滑块模组运动时带动皮带转动,同时皮带上下两端与皮带轮连接,皮带轮与发电机通过轴连接,实现皮带轮转动的同时带动发电机输出电能;
所述控制系统包括激光二极管、光敏电阻、L型支架、电阻滑套和弹簧;激光二极管通过粘接固定在滑块模组的尾部,L型支架通过螺纹与底板连接,电阻滑套间隙配合于L型支架上,光敏电阻与电阻滑套过渡配合连接;当扑翼运动到上下极限位置时具有预留速度,此时滑块模组压缩弹簧,将剩余动能转化为弹簧的弹性势能,并且弹簧在滑块模组反方向运动时将能量返回给滑块模组,从而提高能量采集效率;激光二极管和光敏电阻用于采集扑翼运动到极限位置时的信号,从而根据实际情况调整扑翼俯仰运动,变工况运行,提高装置的适用性。
本发明进一步的改进在于,扑翼与滑块模组的轴端过盈配合连接。
本发明进一步的改进在于,直线轴承与光轴导轨间隙配合实现相对滑动。
本发明进一步的改进在于,发电机的轴端与轴承过渡配合连接。
本发明进一步的改进在于,轴承与轴承座过渡配合连接。
本发明进一步的改进在于,弹簧通过弹簧压片固定在底板上,弹簧压片与底板通过螺纹连接。
本发明进一步的改进在于,在稳定水流下对扑翼进行半主动控制运行时,扑翼结构的俯仰运动采用主动控制形式,由步进电机驱动,通过控制步进电机程序,使扑翼在运动到上下极限位置时改变俯仰角度;沉浮运动采用被动驱动形式,由水流推动扑翼整体结构做沉浮运动,扑翼整体结构固定于步进电机所处的滑块模组上,滑块模组通过内置的直线轴承与光轴导轨配合运动,同时通过皮带与皮带轮结构将滑块模组的沉浮运动转化为发电机主轴的旋转运动。
本发明进一步的改进在于,在不稳定水流下对扑翼进行半主动控制运行时,扑翼结构的俯仰运动接收来自光敏电阻的信号,确保当扑翼运行到极限位置时改变俯仰角度;在面对复杂不稳定水流时,扑翼到达极限位置的时间随水流的变化而变化;当扑翼运行到极限位置时,固连于滑块模组尾部的激光二极管照射到对应位置的光敏电阻上,使光敏电阻的阻值发生变化,通过读取该变化值即可对扑翼的俯仰角度进行控制。
本发明进一步的改进在于,激光二极管、光敏电阻及其导线进行防水处理,步进电机、直线轴承以及轴承能够适应于水下工作。
与现有技术相比,本发明至少具有以下有益的技术效果:
本发明提供了一种新型水下半主动式扑翼能量采集装置,该装置通过直线轴承、皮带轮和发电机实现扑翼沉浮方向被动直线运动的能量采集,通过步进电机主动控制扑翼在极限位置处改变俯仰角度,从而实现能量的连续采集。
首先,该装置在水下运行,所以充分考虑了长期水下运行的可靠性与稳定性,对关键元件,如激光二极管、光敏电阻、线束等进行了防水处理,确保满足长期水下工作的要求。
并且在极限位置处设置两组弹簧,能够讲扑翼运动到极限位置时的动能转化为弹性势能,并且在扑翼反方向运动时返还,减少了扑翼在极限位置处的能量损失,提高了装置的能量采集效率。
其次,当扑翼在稳定水流下运动至极限位置时,该装置由步进电机精准控制扑翼的俯仰角度,再由水流驱动扑翼做沉浮运动,实现了扑翼连续平稳的往复运动,该往复运动带动滑块模组同步运动,再通过皮带轮传动结构带动发电机主轴旋转,将往复运动的机械能转化成发电机输出的电能。
最后,当扑翼处于不稳定水流工况时,扑翼到达极限位置的时间随来流的变化而变化,该装置的激光二极管和光敏电阻可以将扑翼到达极限位置的信号反馈给控制器,从而根据实际情况控制扑翼俯仰角度,因此该装置能够在复杂多变的水流环境下工作并且及时做出反馈调整,适用于大范围变工况运行。
综上所述,本发明突破了工作环境的限制,在水下拥有可靠稳定的工作性能,对水流能量采集研究提供了新的技术途径。同时传动结构简单且高效,制造加工成本低,长时间运行可靠性较高,维护成本较低,具有很高的实用价值。
附图说明
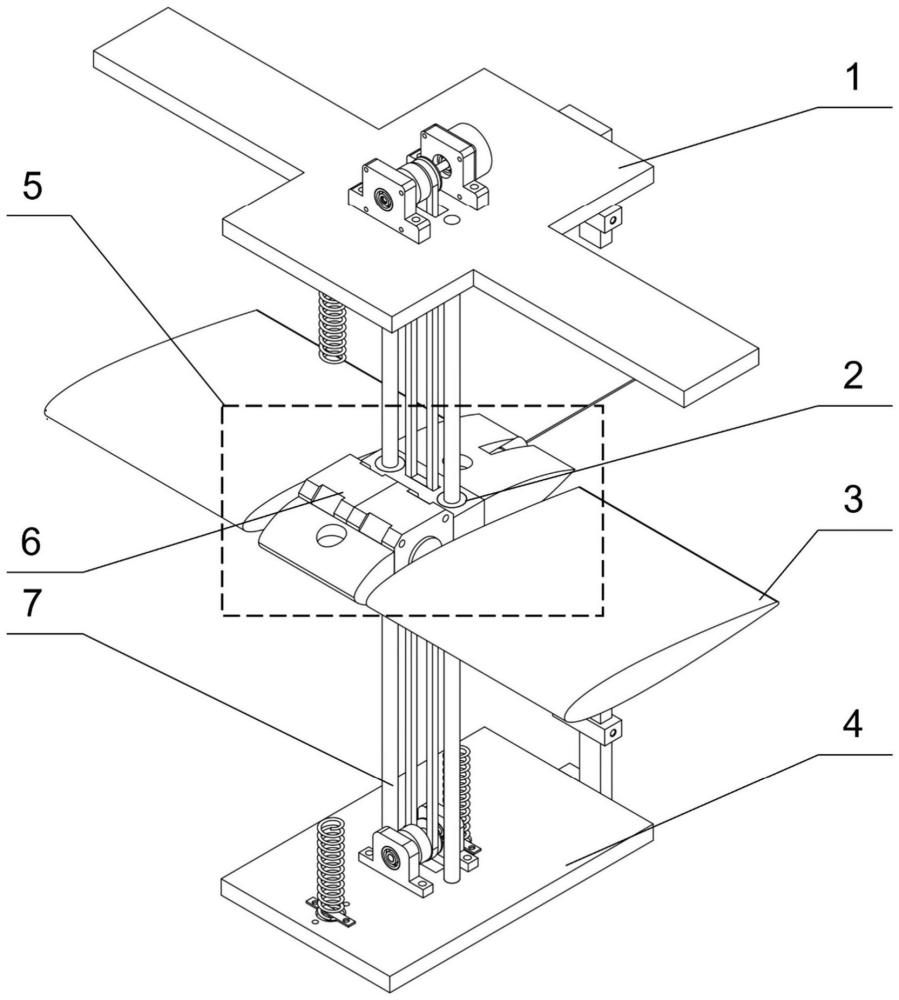
图1是本发明一种新型水下半主动式扑翼能量采集装置的结构示意图;
图2是本发明扑翼能量采集传动输出结构示意图;
图3是本发明扑翼能量采集控制系统结构示意图;
附图标记说明:
1、顶板;2、直线轴承;3、扑翼;4、底板;5、滑块模组;6、步进电机;7、光轴导轨;8、发电机;9、皮带;10、皮带滑块;11、皮带轮;12、轴承;13、轴承座;14、弹簧压片;15、电阻滑套;16、激光二极管;17、弹簧;18、光敏电阻;19、L型支架。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细说明。
请参阅图1,本发明提供的一种新型水下半主动式扑翼能量采集装置,包括沉浮自由度运动结构和俯仰自由度运动结构。所述沉浮自由度运动结构和俯仰自由度运动结构由顶板1、直线轴承2、扑翼3、底板4、滑块模组5、步进电机6和光轴导轨7组成。顶板1与底板4分别在光轴导轨7两端进行螺纹连接,直线轴承2与滑块模组5过渡配合连接,扑翼3与滑块模组5的轴端过盈配合连接,直线轴承2与光轴导轨7间隙配合实现相对滑动。
请参阅图2,本发明提供的扑翼能量采集传动输出结构示意图。所述传动输出结构由发电机8、皮带9、皮带滑块10、皮带轮11、轴承12、轴承座13组成。发电机8与轴承座13进行螺纹连接,发电机8的轴端与轴承12过渡配合连接,轴承12与轴承座13过渡配合连接,皮带轮11与发电机8轴端通过紧固螺钉连接并且与皮带9配合传动,皮带9的一侧与皮带滑块10粘接。
请参阅图3,本发明提供的扑翼能量采集控制系统结构示意图。由弹簧压片14、电阻滑套15、激光二极管16、弹簧17、光敏电阻18和L型支架19组成。弹簧17通过弹簧压片14固定在底板4上,弹簧压片与底板4通过螺纹连接,激光二极管16通过粘接固定在滑块模组5的尾部,L型支架19通过螺纹与底板4连接,电阻滑套15间隙配合于L型支架19上,可通过紧固螺钉固定在合适位置,光敏电阻18与电阻滑套15过渡配合连接。
上述扑翼能量采集装置在稳定水流下运行时,通过驱动步进电机6调整扑翼3的俯仰角度,在来流作用下,扑翼3会受到流体的驱动产生升力,从而带动滑块模组5沿着光轴导轨7做直线运动,同时滑块模组5也会带动皮带9运动,皮带9会通过皮带轮11将直线运动转化为旋转运动,从而使发电机8主轴运动,输出电能。当扑翼3运动到极限位置时,会压缩弹簧17,将动能转化为弹性势能,步进电机6会及时调整扑翼3的俯仰角度,从而使扑翼3产生相反方向的升力,滑块模组5会向相反方向运动,同时弹簧17会将储存起来的弹性势能转化为动能返还给滑块模组5,重复上述过程到达极限位置时完成一个往复直线运动周期,通过对步进电机6的程序编写来控制扑翼3的俯仰角度、周期、频率等,可以适应稳定水流,实现半主动式能量采集。由于直线轴承2与光轴导轨7间的摩擦损失小,皮带轮11结构简单,因此可以高效采集水流能量用于发电机输出电能。
上述扑翼能量采集装置在不稳定水流下运行时,能量采集过程与稳定水流过程类似,区别为:当扑翼3带动滑块模组5运动到极限位置时,压缩弹簧17,此时位于滑块模组5尾部的激光二极管16会照射到光敏电阻18上,从而输出一个极限位置的信号来控制步进电机6,转变扑翼3的俯仰角度,在极限位置处弹簧17的作用与上述相同,由于在不稳定水流下,扑翼3及其滑块模组5到达极限位置的时间随水流变化,通过激光二极管16与光敏电阻18组成一个光电开关,可以使装置适应复杂水流。同时也可通过调整电阻滑套15与L型支架19的相对位置来改变光敏电阻18的相对高度,从而适配不同的扑翼。
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。