一种充电机器人连接车辆接口的操作范围测试方法及系统
文献发布时间:2024-01-17 01:28:27
技术领域
本发明属于电动汽车智能充电技术领域,特别涉及一种充电机器人连接车辆接口的操作范围测试方法及系统。
背景技术
目前,在电动汽车充电机器人领域,对车辆插座的识别定位是研究热点之一。目前虽然有各种识别定位方法/算法(如双目视觉等)和各种物理实现装置,但是,针对不同厂家的机器人产品缺少一种标准化的测量方法,能够实现简单测量机器人车辆接口连接操作的有效空间范围,明确机器人产品在多大的空间内可以成功识别车辆插座并通过机器人成功连接车辆接口,这造成在比较产品性能时不方便。
发明内容
针对上述问题,本发明旨在提出一种充电机器人连接车辆接口的操作范围测试方法,可以简单有效地测出有效空间范围,可以为比较产品性能提供一种有效且快速的测量手段。
本发明采用的技术方案如下:一种充电机器人连接车辆接口的操作范围测试方法,所述方法包括以下步骤:将充电枪对准模拟车辆插座,记录模拟车辆插座的位置;调节充电枪的位置或角度,每调节一次,记录其位置或角度,使充电枪的位置或角度递增,直到充电机器人不能成功完成连接车辆接口的操作为止;记录充电机器人成功完成充电枪插接操作的最大位置或角度。
进一步地,调节充电枪的位置包括:调节充电枪的高度、充电枪与模拟车辆插座的对准距离以及充电枪的偏移位置;调节充电枪的角度包括:调节充电枪的倾斜角度。
进一步地,调节充电枪的高度,每调节一次,记录其位置包括:当充电枪对准模拟车辆插座后,模拟车辆插座与充电枪处于同一水平高度H,调节充电枪向上移动或向下移动高度h后,记录充电枪的位置。
进一步地,调节充电枪与模拟车辆插座的对准距离,每调节一次,记录其位置包括:当充电枪对准模拟车辆插座后,模拟车辆插座与充电枪处于同一水平高度H,调节充电枪向后移动距离d后,记录充电枪的位置。
进一步地,调节充电枪的偏移位置,每调节一次,记录其位置包括:当充电枪对准模拟车辆插座后,模拟车辆插座与充电枪处于同一水平高度H,调节充电枪向左或向右移动距离d后,记录充电枪的位置。
进一步地,调节充电枪的倾斜角度,每调节一次,记录其位置包括:
当充电枪对准模拟车辆插座后,模拟车辆插座与充电枪处于同一水平高度H,调节充电枪向上旋转或向下旋转至角度
另外,本发明还提出了一种充电机器人连接车辆接口的操作范围测试系统,所述系统包括第一记录模块、第二记录模块和第三记录模块;其中,第一记录模块用于将充电枪对准模拟车辆插座,记录充电枪的空间位置;第二记录模块用于调节充电枪的位置或角度,每调节一次,记录其位置或角度,使充电枪的位置或角度递增,直到充电机器人不能成功完成连接车辆接口的操作为止;第三记录模块用于记录充电机器人成功完成充电枪插接操作的最大位置或角度。
进一步地,所述第二记录模块用于调节充电枪的位置或角度,每调节一次,记录其位置或角度,使充电枪的位置或角度递增,直到充电机器人不能成功完成连接车辆接口的操作为止;包括:所述第二记录模块用于调节充电枪的高度、充电枪与模拟车辆插座的对准距离和充电枪的偏移位置;以及调节充电枪的倾斜角度,每调节一次,记录其位置或角度,使充电枪的位置或角度递增,直到充电机器人不能成功完成连接车辆接口的操作为止。
本发明提出的一种充电机器人连接车辆接口的操作范围测试方法及系统,通过充电枪在不同位姿状态(包括水平位置变化、竖直位置变化、前后位置变化、角度变化)下的定位识别和车辆接口连接操作,明确机器人的有效空间操作范围。所提出的标准化测试方法,可以用于目前市场上各类型充电机器人,可以快速测出不同产品有效操作空间的大小,明确产品性能好坏,本发明实现了采用一种简单统一的方法进行充电机器人操作范围的测试。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图来实现和获得。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为车辆插座与充电装置示意图;
图2为初始车辆插座操作范围测试装置示意图;
图3为本发明第一实施例的一种充电机器人连接车辆接口的操作范围测试方法的流程示意图;
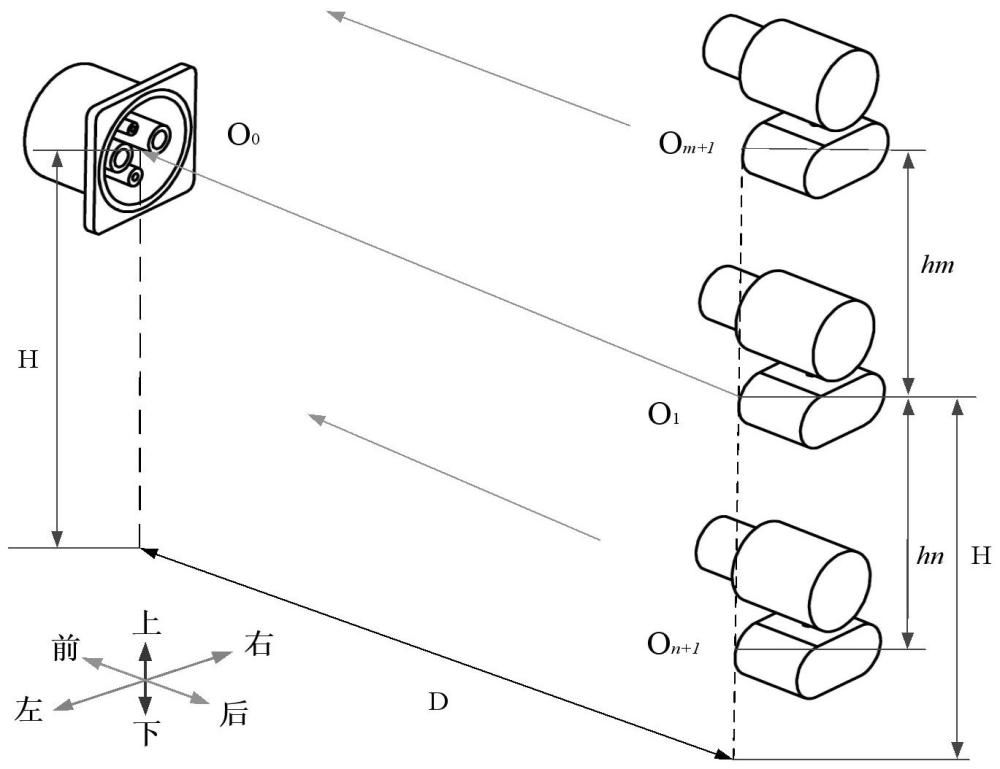
图4为不同高度的车辆插座操作范围测试装置示意图;
图5为本发明第二实施例的一种充电机器人连接车辆接口的操作范围测试方法的流程示意图;
图6为不同距离的车辆插座操作范围测试装置示意图;
图7为本发明第三实施例的一种充电机器人连接车辆接口的操作范围测试方法的流程示意图;
图8为不同偏移位置的车辆插座操作范围测试装置示意图;
图9为本发明第四实施例的一种充电机器人连接车辆接口的操作范围测试方法的流程示意图;
图10为不同倾斜角度的车辆插座操作范围测试装置示意图;
图11为一种充电机器人连接车辆接口的操作范围测试系统的示意图;
附图标记:1、直流电源孔;2、保护接地孔;3、充电枪;4、双目视觉感知模块;5、相机。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示为车辆插座与充电装置示意图,充电装置包括充电枪3(充电枪即充电插头的俗称)、双目视觉感知模块4,双目视觉感知模块4包括相机5,双目视觉感知模块4与充电枪3的一端相连,双目视觉感知模块4内部内置两个相机5,双目视觉感知模块4通过获取两个相机5在摄像范围内采集的图像,对车辆插座重复(≥10次)识别定位和插接,测试机器人将车辆插头连接到车辆插座的有效空间范围、时间和成功率。图1中O
图2中车辆插座中心点O
本发明第一实施例中提出的一种充电机器人连接车辆接口的操作范围测试方法,如图3所示,包括以下步骤:将充电枪对准模拟车辆插座,记录模拟车辆插座的位置;当充电枪对准模拟车辆插座后,模拟车辆插座与充电枪处于同一水平高度H,调节充电枪向上移动或向下移动高度h后,记录此时充电枪的位置;让充电机器人执行插入充电枪的操作,观察充电机器人是否能够成功完成车辆接口的连接操作;如果成功,记录操作时间并增大高度h,直至超出充电机器人的极限范围为止,分别记录此时向上移动或向下移动高度h的值(极限值),标定充电机器人在竖直方向上的有效操作范围。
下面对结合不同高度的车辆插座操作范围测试装置对本发明第一实施例中提出的一种充电机器人连接车辆接口的操作范围测试方法进行解释说明:图4中O
车辆插座和双目视觉感知模块分别水平置于同一高度H(H数值根据具体机器人产品的高度确定,如取H=1m),车辆插座置于双目视觉感知模块前方距离D(0.1≤D≤0.4m),双目视觉感知模块对车辆插座进行(≥1次)识别定位和插接,测试机器人是否能够成功完成插接操作,并记录插接时间。完成后,充电枪向上移动至高度h
本发明第二实施例中提出的一种充电机器人连接车辆接口的操作范围测试方法,如图5所示,包括以下步骤:将充电枪对准模拟车辆插座,记录模拟车辆插座的位置;当充电枪对准模拟车辆插座后,模拟车辆插座与充电枪处于同一水平高度H,调节充电枪向后移动距离d,记录此时充电枪的位置;让机器人执行插入充电枪的操作,观察充电机器人是否能够成功完成车辆接口的连接操作;如果成功,记录操作时间并增大距离d,直至超出充电机器人的极限范围为止,记录此时充电枪向后移动距离d的值(极限值),标定充电机器人在前后方向上的有效操作范围,即从初始位置至向后能够成功完成操作的最大的距离d值。
下面对结合不同距离的车辆插座操作范围测试装置对本发明第二实施例中提出的一种充电机器人连接车辆接口的操作范围测试方法进行解释说明:图6中O'
车辆插座和双目视觉感知模块分别水平置于同一高度H(H数值根据具体机器人产品的高度确定,如取H=1m),车辆插座置于视觉感知模块前方距离D(0.1≤D≤0.4m),双目视觉感知模块对车辆插座进行(≥1次)识别定位和插接,试机器人是否能够成功完成插接操作,并记录插接时间。完成后,充电枪向后移动至距离
本发明第三实施例中提出的一种充电机器人连接车辆接口的操作范围测试方法,如图7所示,包括以下步骤:将充电枪对准模拟车辆插座,记录模拟车辆插座的位置;当充电枪对准模拟车辆插座后,模拟车辆插座与充电枪处于同一水平高度H,调节充电枪向左或向右移动距离d后,记录此时充电枪的位置;让机器人执行插入充电枪的操作,观察充电机器人是否能够成功完成车辆接口的连接操作;如果成功,记录操作时间并增大距离d,直至超出充电机器人的极限范围为止,分别记录此时充电枪向左移动或向右移动距离d的值(极限值),标定充电机器人在竖直方向上的有效操作范围。
下面对结合不同偏移位置的车辆插座操作范围测试装置对本发明第三实施例中提出的一种充电机器人连接车辆接口的操作范围测试方法进行解释说明:图8中O
车辆插座和双目视觉感知模块分别水平置于同一高度H(H数值根据具体机器人产品的高度确定,如取H=1m),车辆插座置于双目视觉感知模块前方距离D(0.1≤D≤0.4m),双目视觉感知模块对车辆插座进行(≥1次)识别定位和插接,测试机器人是否能够成功完成插接操作,并记录插接时间。完成后,充电枪向右移动至距离
本发明第四实施例中提出的一种充电机器人连接车辆接口的操作范围测试方法,如图9所示,包括以下步骤:将充电枪对准模拟车辆插座,记录模拟车辆插座的位置;当充电枪对准模拟车辆插座后,模拟车辆插座与充电枪处于同一水平高度H,调节充电枪向上旋转或向下旋转至角度
车辆插座的安装位姿因车型而异,车辆插座平面有可能并不垂直于地面,为验证视觉感知系统对不同倾角车辆插座的感知性能,通过模拟双目视觉感知模块倾斜工况的方法来实现对感知系统的验证。图10中O''
车辆插座和双目视觉感知模块分别水平置于同一高度H(H数值根据具体机器人产品的高度确定,如取H=1m),车辆插座置于双目视觉感知模块前方距离D(0.1≤D≤0.4m),双目视觉感知模块对车辆插座进行(≥1次)识别定位和插接,测试机器人是否能够成功完成插接操作,并记录插接时间。完成后,充电枪向上旋转至角度
另外,本发明还提出了一种充电机器人连接车辆接口的操作范围测试系统,如图11所示,所述系统包括第一记录模块、第二记录模块和第三记录模块;其中,
第一记录模块用于将充电枪对准模拟车辆插座,记录充电枪的空间位置;
第二记录模块用于调节充电枪的位置或角度,每调节一次,记录其位置或角度,使充电枪的位置或角度递增,直到充电机器人不能成功完成连接车辆接口的操作为止;
第三记录模块用于记录充电机器人成功完成充电枪插接操作的最大位置或角度。
进一步地,所述第二记录模块用于调节充电枪的位置或角度,每调节一次,记录其位置或角度,使充电枪的位置或角度递增,直到充电机器人不能成功完成连接车辆接口的操作为止;包括:
所述第二记录模块用于调节充电枪的高度、充电枪与模拟车辆插座的对准距离和充电枪的偏移位置;以及调节充电枪的倾斜角度,每调节一次,记录其位置或角度,使充电枪的位置或角度递增,直到充电机器人不能成功完成连接车辆接口的操作为止。
尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。