一种载带卷盘包装线
文献发布时间:2024-01-17 01:28:27
技术领域
本发明涉及载带卷盘包装线技术领域,特别是涉及一种载带卷盘包装线。
背景技术
MLCC(Multi-layer Ceramic Capacitors)即多层陶瓷电容器,主要用于各类电子整机中的振荡、耦合、滤波、旁路电路中,应用领域包括新能源、工业控制、通信、信息技术、消费电子等。受新能源汽车、工业自动化、5G以及智能化消费电子产品的需求驱动,MLCC市场如今迎来大规模增长,并且将在今后一段时间内保持高速增长的趋势。如今,MLCC的年产销量已达到数万亿只,因此对于MLCC厂家来说,内部包装和物流环节的高效、精准度显得尤为重要。
载带卷盘是一种用于存储以及转移MLCC的包装辅料。在MLCC生产和包装线上,先使用载带等距地承放MLCC,然后将载带卷设在载带卷盘上,最后再将载带卷盘转移至封装箱内,完成打包动作。
传统上对载带卷盘进行的包装需要先将载带卷盘堆叠起来,然后装入合适的包装盒内,然后再将多个包装盒装入包装箱内,完成出货。然而,目前的载带卷盘包装线上大部分工序还是需要人工来操作(比如开盒和入盒,开箱等工序),因此生产效率比较低,难以满足日益增长的MLCC市场的需要。
发明内容
基于此,本发明的目的在于,提供一种载带卷盘包装线,其具可对载带卷盘自动包装,生产效率高。
一种载带卷盘包装线,包括机架,沿第一方向依次设置在所述机架上的载带卷盘输送线、堆叠装置和开盒装置,依次设置在所述开盒装置沿所述第一方向下游的包装盒输送线和装箱平台,其中,所述包装盒输送线的一侧设有开箱装置;所述载带卷盘输送线用于将所述载带卷盘沿所述第一方向进行传送;所述开盒装置用于将扁平状的未成型包装盒立体成型;所述堆叠装置用于堆叠经所述载带卷盘输送线传送的载带卷盘,并将成堆叠状的所述载带卷盘送入成型包装盒内;所述开箱装置用于将扁平状的未成型包装箱立体成型,并将成型包装箱移至所述包装盒输送线;所述包装盒输送线用于将所述包装箱传送至所述装箱平台,并将输送载有载带卷盘的包装盒送入所述包装箱内。
相较于现有技术,本发明载带卷盘包装线通过载带卷盘输送线传送待包装的载带料盘,通过开盒装置将未成型包装盒立体成型,通过堆叠装置将成堆叠状态的载带卷盘装入成型包装盒内,然后通过包装盒输送线朝装箱平台传送,与此同时,通过开箱装置将未成型包装箱立体成型,并将成型包装箱移至包装盒输送线,再经包装盒输送线出传送至装箱平台,最后将载有载带卷盘的包装盒送入装箱平台上的包装箱,完成装箱,可实现载带卷盘的传送,包装盒的开盒和包装箱的开箱,以及载带卷盘的入盒和包装盒的入箱等工序的全自动化,大大提高生产效率。
进一步地,所述开箱装置包括沿所述第一方向延伸的支撑架,并列设置在所述支撑架的沿第二方向相对所述包装盒输送线另一侧的至少两储箱机构,以及设置在所述支撑架内的包装箱成型机构,其中,所述第二方向垂直于所述第一方向;所述储箱机构用于放置扁平状的未成型包装箱;所述包装箱成型机构可沿所述第一方向来回移动,当所述包装箱成型机构沿所述第一方向移动至其中一所述储箱机构时,所述包装箱成型机构将扁平状的未成型包装箱立体成型,并将成型包装箱移至所述包装盒输送线。
进一步地,所述开箱装置包括两个所述储箱机构,分别为第一储箱机构和第二储箱机构,分别用于放置不同尺寸、扁平状的未成型包装箱;所述第一储箱机构包括第一支架、第一导箱板和第二导箱板,所述第一支架倾斜地设置在所述支撑架的沿所述第二方向相对所述包装盒输送线的另一侧;相互平行的所述第一导箱板和所述第二导箱板分别设置在所述第一支架沿所述第一方向的相对两侧,形成一供放置在所述第一储箱机构的包装箱移动的通道,且所述第二导箱板可沿所述第一方向来回移动;所述第二储箱机构包括第二支架、第三导箱板和第四导箱板,所述第二支架倾斜地设置在所述支撑架的沿所述第二方向相对所述包装盒输送线的另一侧;相互平行的所述第三导箱板和所述第四导箱板分别设置在所述第二支架沿所述第一方向的相对两侧,形成一供放置在所述第二储箱机构的包装箱移动的通道,且所述第四导箱板可沿所述第一方向来回移动。
进一步地,所述包装箱成型机构包括位于所述支撑架内、并可沿所述第一方向来回移动的移动支架,所述移动支架上设置有吸附组件和成型弯臂;所述吸附组件可沿所述第二方向来回移动,用于吸附未成型包装箱,以使未成型包装箱朝所述包装盒输送线的方向移动;所述成型弯臂位于所述吸附组件的下方,所述成型弯臂沿第二方向延伸后逐渐弯曲至向沿所述第一方向延伸,用于在所述吸附组件吸附未成型包装箱朝所述包装盒输送线的方向移动时,抵接未成型包装箱,以使未成型包装箱立体成型;所述移动支架上还设置有推箱臂,所述推箱臂设位于所述成型弯臂的上方,且可以沿所述第一方向来回移动,用于将成型包装箱推至沿所述第一方向的下游。
进一步地,所述载带卷盘包装线还包括沿所述第一方向设置在所述载带卷盘输送线上游的储料仓,以及设置在所述载带卷盘输送线一侧的取料装置;所述储料仓用于储存载带卷盘;所述取料装置用于将所述储料仓内的载带卷盘搬运至所述载带卷盘输送线上。
进一步地,所述取料装置包括取料机构和矫正机构,以及设置在所述储料仓正上方的视觉检测单元;所述取料机构设置在机架上,并位于所述载带卷盘输送线的一侧,所述取料机构具有一可移动的自由端;所述视觉检测单元用于检测储料仓处的载带卷盘与预设贴标角度的偏差;所述矫正机构包括旋转单元和拾取单元,所述旋转单元连接于所述取料机构的自由端,所述旋转单元具有一旋转端,所述拾取单元连接于所述旋转单元的旋转端连接,所述拾取单元用于取放载带卷盘,并可随所述取料机构自由端的移动而移动,将所述储料仓内的载带卷盘搬运至所述载带卷盘输送线上,在此过程中,所述旋转单元根据所述视觉检测单元反馈的载带卷盘角度偏差信息,驱动所述拾取单元和载带卷盘一起作旋转,直至载带卷盘转动至预设角度。
进一步地,所述载带卷盘包装线还包括包装盒上料装置,所述包装盒上料装置位于所述载带卷盘输送线末端的一侧;所述包装盒上料装置包括设置于所述机架的至少两个用于储存扁平状未成型包装盒的包装盒储存仓和设置在所述机架上的包装盒搬运机构;所述包装盒搬运机构用于将叠放在所述包装盒储存仓内的未成型包装盒搬运在所述开盒装置。
进一步地,所述包装盒上料装置包括还设置在所述包装盒储存仓正上方、与所述包装盒储存仓对应的视觉识别组件;所述视觉识别组件用于识别包装盒储存仓内最上方的未成型包装盒的角度位置信息;所述包装盒搬运机构包括搬运单元和取盒单元,所述搬运单元设置在所述机架上,其具有可移动的自由端,所述取盒单元连接于所述搬运单元的自由端,用于在将储存在所述包装盒储存仓内的未成型包装盒搬运至所述开盒装置,在此过程中,所述搬运单元根据所述视觉识别组件反馈的未成型包装盒的角度位置信息,驱动取盒单元和未成型包装盒一起旋转,直至未成型包装盒转动至预设角度后,再放置在所述开盒装置上。
进一步地,所述堆叠装置包括设置在所述机架上并位于所述载带卷盘输送线沿所述第一方向下游的龙门架,安装在所述龙门架上的卷盘搬运机构,以及设置在所述机架上并位于所述龙门架沿所述第一方向下游的叠盘机构;所述叠盘机构包括升降组件和卷盘托板;所述卷盘托板水平设置在所述机架上方,用于承载所述载带卷盘;所述升降组件的活动端与所述卷盘固定连接,用于驱动所述卷盘托板沿第三方向上下移动;所述卷盘搬运机构包括安装在所述龙门架上的旋转组件,以及两个分别可升降地设置在所述旋转组件的旋转端的沿所述第一方向的相对两侧的两个获取组件;两所述获取组件用于交替地将所述载带卷盘输送线上的载带卷盘搬运至所述卷盘托板上;其中,所述第三方向垂直于所述第一方向。
进一步地,所述卷盘搬运机构包括搬运旋转架和设置在所述搬运旋转架相对两侧的两搬运滑台气缸;两所述获取组件分别固定在两所述搬运滑台气缸上,所述搬运滑台气缸用于驱动所述获取组件沿第三方向上下移动。
进一步地,所述升降组件包括托架、丝杠副和升降板;所述托架设置在所述机架上,所述丝杠副沿所述第三方向竖直地安装在所述托架上,所述升降板竖直设置,并与所述丝杠副的丝杠螺母固定连接;所述叠盘机构还包括槽型光电感应器,所述槽型光电感应器包括多个,从上至下依次设置在所述托架的同侧边缘;所述升降板设置有感应片,所述感应片设置在所述升降板的边缘上,所述感应片向所述托架方向伸出,当所述升降板作升降运动时,所述感应片从多个槽型光电感应器的槽型结构穿过。
进一步地,所述载带卷盘包装线还包括设置在所述载带卷盘输送线旁侧的贴标装置和打印机,所述贴标装置位于所述打印机与所述载带卷盘输送线之间;所述贴标装置包括贴标旋转架、旋转驱动机构、竖直驱动机构和吸附贴标机构;所述旋转驱动机构设置在所述机架的上方,所述旋转驱动机构具有一旋转端;所述贴标旋转架安装在所述旋转驱动机构的旋转端上;所述竖直驱动机构包括两个,分别设置在所述贴标旋转架沿第二方向的相对两侧,两个竖直驱动机构均具有一可沿第三方向移动的活动端;所述吸附贴标机构包括两个,两个吸附贴标机构分别设置在两个竖直驱动机构的活动端,所述吸附贴标机构用于吸附所述打印机打印的标签,然后粘贴至位于所述载带卷盘输送线上的载带卷盘;其中,所述第二方向垂直于所述第一方向,所述第三方向分别垂直于所述第一方向和所述第二方向。
进一步地,所述贴标装置还包括水平驱动机构;所述水平驱动机构包括两个,两水平驱动机构水平地设置在所述贴标旋转架上,两所述水平驱动机构分别具有一可伸缩的自由端,两所述水平驱动机构的活动端沿所述第二方向反向设置,且朝向所述贴标旋转架的外侧水平地伸出;两所述竖直驱动机构分别固定在两水平驱动机构的活动端上。
进一步地,所述开盒装置包括设置在所述机架上的开盒平台,以及设置在所述开盒平台沿第二方向相对两侧的翻板和推板;所述推板可沿所述第二方向移动,用于抵接放置于所述开盒平台的未成型包装盒;所述翻板铰接于所述开盒平台的一侧,用于向上翻转时将未成型包装盒撑起成型;其中,所述第二方向垂直于所述第一方向。
进一步地,所述开盒平台包括相互平行的开盒底板和开盒顶盖,以及设置在由所述开盒底板和所述开盒顶盖之间形成的容置空间内的真空吸附组件;所述开盒顶盖上设有多个吸孔;所述真空吸附组件包括多个与所述吸孔一一对应的吸嘴,每一所述吸嘴正对所对应的所述吸孔,用于对放置于所述开盒顶盖上的未成型包装盒产生吸附力,以固定未成型包装盒。
为了更好地理解和实施,下面结合附图详细说明本发明。
附图说明
图1为本发明载带卷盘包装线一种实施方式的结构示意图;
图2为本发明载带卷盘包装线一种实施方式的局部结构示意图;
图3为本发明带有机罩的载带卷盘包装线一种实施方式的结构示意图;
图4为本发明载带卷盘包装线一种实施方式中堆叠装置在载带卷盘包装线上的位置示意图;
图5为本发明载带卷盘包装线中卷盘搬运机构一种实施方式的结构示意图;
图6为本发明载带卷盘包装线中叠盘机构一种实施方式的结构示意图;
图7为本发明载带卷盘包装线中升降板一种实施方式的结构示意图;
图8为本发明载带卷盘包装线中槽型光电感应器和感应片的位置示意图;
图9为本发明载带卷盘包装线中整形盒、载带卷盘以及开盒装置的位置示意图;
图10为本发明载带卷盘包装线中开盒装置一种实施方式的结构示意图(翻板翻起状态);
图11为本发明载带卷盘包装线中开盒装置一种实施方式另一角度的结构示意图(翻板倒下状态);
图12为本发明载带卷盘包装线中开盒装置的第一限位夹、第三限位夹以及未成型包装盒的示意图;
图13为本发明载带卷盘包装线中开箱装置一种实施方式的结构示意图;
图14为本发明载带卷盘包装线中开箱装置的支撑架和两个储物机构的结构示意图;
图15为本发明载带卷盘包装线中开箱装置的包装箱成型机构的结构示意图;
图16为本发明载带卷盘包装线中开箱装置隐藏两个储物机构后另一角度的结构示意图。
图17为本发明载带卷盘包装线中开箱装置的传送机构的结构示意图;
图18为本发明载带卷盘包装线中储料仓和取料装置的位置示意图;
图19为本发明载带卷盘包装线中取料装置一种实施方式的结构示意图;
图20为本发明载带卷盘包装线中取料装置一种实施方式另一角度的结构示意图;
图21为本发明载带卷盘包装线中包装盒上料装置一种实施方式的结构示意图;
图22为本发明载带卷盘包装线中机架和包装盒上料装置的包装盒储存仓的结构示意图;
图23为本本发明载带卷盘包装线中包装盒储存仓、水平导轨副、侧板、升降单元和托板的结构示意图;
图24为本发明载带卷盘包装线中包装盒上料装置的包装盒搬运机构的结构示意图;
图25为本发明载带卷盘包装线中贴标装置、打印机、载带卷盘输送线和机架的位置示意图;
图26为本发明载带卷盘包装线中贴标装置的结构示意图;
图27为本发明载带卷盘包装线中贴标装置的旋转架和水平驱动单元的结构示意图;
附图标记:
1、机架;2、载带卷盘;11、机罩;
10、载带卷盘输送线;
20、堆叠装置;200、龙门架;202、卷盘搬运机构;2020、旋转组件;2022、获取组件;2024、搬运旋转架;2026、搬运滑台气缸;2022a、第一真空吸盘;204、叠盘机构;2040、卷盘托板;2041、托架;2042、叠盘机构中的丝杠;2043、升降板;2043a、升降板的滑块安装槽;2044、感应片;2045、第一升降导轨副;2046、第一传感器;2047、第二传感器;2048、第三传感器;206、整形盒;
30、开盒装置;311、支撑座;300、开盒平台;3002、开盒底板;3003、支撑柱;3004、开盒顶盖;3004a、吸孔;3006、真空吸附组件;3006a、真空吸板;3006b、吸嘴;302、翻板;3021、第一限位夹;3023、第三限位夹;304、推板;306、开盒升降气缸;308、翻板驱动组件;3080、翻板驱动部件;3082、立杆;3084、连接板;310、开盒滑台气缸;
40、包装盒输送线;
50、开箱装置;500、支撑架;511、第一升降组件;512、第二升降组件;514、开箱导轨副;516、支撑架驱动组件;502、包装箱成型机构;5020、移动支架;5021、导向组件;5023、摆臂;5025、摆臂气缸;5022、吸附组件;5022a、安装臂;5022b、吸盘组;5024、成型弯臂;5026、推箱臂;5028、包装箱成型机构的浮动接头;504、储箱机构;5041、第一储箱机构;5041a、第一支架;5041b、第一导箱板;5041c、第二导箱板;5041d、第一储箱机构的调节丝杆;5041e、第一储箱机构的支撑部;5042、第二储箱机构;5042a、第二支架;5042b、第三导箱板;5042c、第四导箱板;506、封箱机构;5060、封箱皮带;5062、封胶带卷轴组件;5064、封箱挡板;508、传送机构;5081、第一限位件;5082、第二限位件;
60、装箱平台;
62、称重平台;
70、储料仓;
80、取料装置;800、取料机构;802、矫正机构;8020、旋转单元;8021、第一支撑件;8022、第二支撑件;8022a、第一折边;8022b、第二折边;8022c、加强筋;8023、旋转单元的伺服电机;8024、旋转单元的行星减速机;8026、拾取单元;8026a、真空吸盘组件;8028、识别单元;8029、升降单元;
90、包装盒上料装置;900、包装盒储存仓;9000、底座;9002、限位板;9003、封板;9004、把手;901、水平导轨副;902、包装盒搬运机构;9020、取盒单元;9020a、连接架;9020b、第二真空吸盘;9022、搬运单元;9022a、四轴机器人的转轴;904、包装盒上料装置的升降机构;9040、升降机构的底板;9041、升降机构的丝杆;9042、升降机构的连接块;9044、升降机构的步进电机;9046、第二升降导轨副;906、贴标托板;
92、贴标装置;920、贴标装置的立柱;922、贴标旋转架;9220、上支撑板;9220a、上延伸部;9222、下支撑板;9222a、下延伸部;924、旋转驱动机构;926、竖直驱动机构;928、吸附贴标机构;929、水平驱动机构;9290、贴标滑台气缸;9292、贴标安装板;
94、打印机。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
需要说明的是,当元件被称为“固定于”另一个元件,它可以是直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”或“固定连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
为提高对载带卷盘的包装效率,本发明实施方式提供一种载带卷盘包装线,以实现包装过程的自动化。
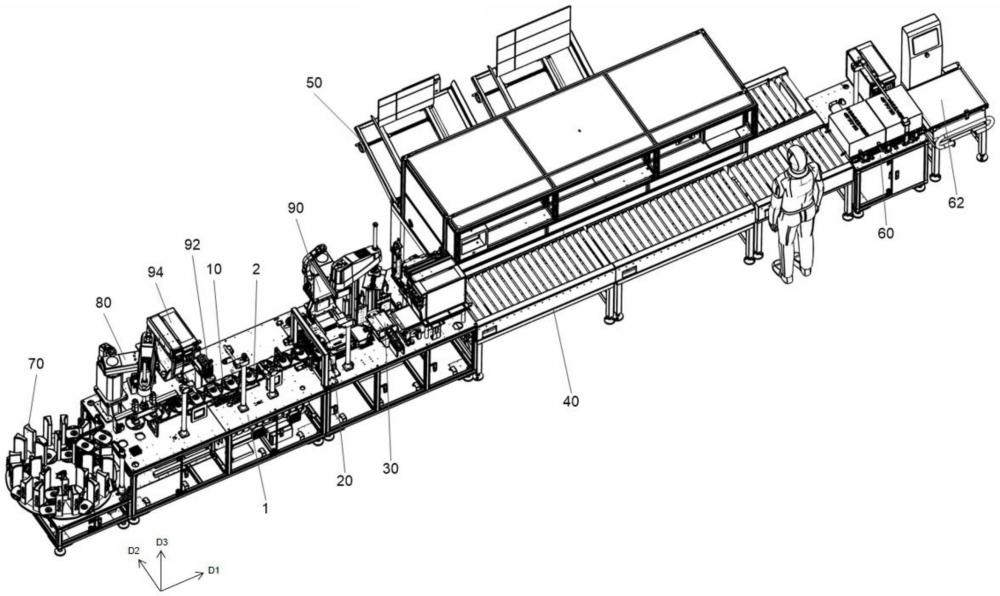
图1和图2示出了本发明载带卷盘包装线一种实施方式的具体结构。如图1和图2所示,本实施方式的载带卷盘包装线包括机架1,沿第一方向D1依次设置在机架1上的载带卷盘输送线10、堆叠装置20和开盒装置30,依次设置在支架1沿第一方向D1下游的包装盒输送线40和装箱平台60,其中,包装盒输送线40的一侧设有开箱装置50。当然,机架1顶部还可以设置如图3所示的机罩11,用于将机架1上的功能机构与外部环境隔离开来。
具体地,机架1整体呈矩形体,其顶面为呈长方形的机架面板,其长度方向与第一方向D1平行。在这里,机架1可为一体成型,也可为由多个呈矩形体的子机架拼合而成,以适应各功能机构的安装需要。载带卷盘输送线10包括沿第一方向D1延伸的输送带以及驱动输送带沿第一方向D1行进的驱动电机,用于逐个地将载带卷盘2沿第一方向传送。
图4和图5示出了本发明载带卷盘包装线中堆叠装置一种实施方式的具体结构。如图4和图5所示,堆叠装置20包括设置载带卷盘输送线10的末端的龙门架200,安装在龙门架200上的卷盘搬运机构202,位于机架1上、依次设置在龙门架200沿第一方向D1下游的叠盘机构204和整形盒206。
具体地,龙门架200包括与第一方向D1垂直的横梁以及支撑横梁的两立柱。卷盘搬运机构202包括旋转组件2020和两个获取组件2022,旋转组件2020固定在龙门架200的横梁上,两个获取组件2022分别可升降地设置在旋转组件2020旋转端的两侧,其中一个获取组件2022与载带卷盘输送线10对应,具体位于载带卷盘输送线10末端的载带卷盘2的正上方,用于获取该载带卷盘2;另一个获取组件2022与叠盘机构204对应,具体位于叠盘机构204的正上方,用于将载带卷盘2释放在叠盘机构204上,再由叠盘机构204堆叠载带卷盘2。如此,通过旋转组件2020驱动两个获取组件2022旋转互换,使得获取动作和释放动作不间断进行,提高了生产效率。
进一步,考虑到旋转组件2020的旋转端接触面积较小,为更稳固地安装两个获取组件2022,卷盘搬运机构202还设置有一个搬运旋转架2024。搬运旋转架2024呈双叉形,其顶部通过螺钉与旋转组件2020的旋转端固定连接,两个获取组件2022分别对称地安装在搬运旋转架2024的两侧,即双叉形的两个叉形的外侧表面上。
作为堆叠装置20的优选设计,卷盘搬运机构202还包括两个搬运滑台气缸2026,用于驱动获取组件2022作升降移动,以获取和释放载带卷盘2。搬运滑台气缸2026设置在搬运旋转架2024和获取组件2022之间,也即在搬运旋转架2024的一侧,一个搬运滑台气缸2026的缸体固定安装在搬运旋转架2024的一个叉形上,获取组件2022则安装在此搬运滑台气缸2026的滑台上,另一侧的搬运滑台气缸2026也如此对称设置。当旋转组件2020每次驱动搬运旋转架2024带动两个获取组件2022旋转至图示位置时,靠近载带卷盘输送线10的搬运滑台气缸2026驱动此侧获取组件2022向下移动,直至获取载带卷盘2,而另一侧的搬运滑台气缸2026驱动此另一侧的获取组件2022向下移动,将载带卷盘2释放到卷盘托板2040上。两侧的获取组件2022均动作完毕后,两侧搬运滑台气缸2026驱动两侧获取组件2022上升,之后由旋转组件2020驱动旋转,两侧的获取组件2022交替进行吸取和释放的动作。
优选地,获取组件2022选用第一真空吸盘2022a来实现载带卷盘2的获取动作,与抓取、夹取等动作相比,使用第一真空吸盘2022a吸取可以简化获取组件2022的结构,通过简单的吸取动作就可牢固吸持载带卷盘2,实现搬运。获取组件2022包括多个真空吸盘,具体来说,在本优选实施例中每个获取组件2022包括3个第一真空吸盘2022a,并呈等腰三角形排布,起到牢固吸取的效果。在这里,旋转组件2020选用旋转气缸,旋转气缸结构简单,工作可靠。在其他实施例中,旋转组件2020也可选用曲柄机构等来实现旋转效果。
如图6所示,叠盘机构204设置在载带卷盘输送线10末端的旁侧,包括卷盘托板2040和升降组件,升降组件设置在机架面板上,其活动端沿竖直方向上下移动,卷盘托板2040与该活动端固定连接,因此升降组件可驱动卷盘托板2040作上下移动。
升降组件具体包括一托架2041、一丝杠副和一升降板2043。托架2041安装在机架面板上,位于载带卷盘输送线10末端的旁侧,托架2041沿竖直方向从上向下延伸,经机架面板表面伸入机架1内。丝杠副安装在托架2041靠近载带卷盘2传送方向所在直线的侧面上,显然丝杠副沿竖直方向设置,在丝杠副的底端设置有丝杠2042的驱动件,在本实施例中驱动件(图未示)采用步进电机,能更精确地控制丝杠螺母每次升降的幅度。升降板2043通过角钢与丝杠副的丝杠螺母固定连接。卷盘托板2040水平地设置在升降板2043背离丝杠副的一侧上。在进行堆叠时,获取组件2022将一个载带卷盘2释放在卷盘托板2040上之后,步进电机驱动丝杠2042旋转,使升降板2043带动卷盘托板2040下降一段距离,该距离等于一个载带卷盘2的厚度,因此下一个获取组件2022就可将下一个载带卷盘2释放在前一个载带卷盘2的顶部,形成堆叠。
进一步,如图6和图7所示,为了保证升降板2043和卷盘托板2040在上下移动时不发生偏移,托架2041上设置有两个第一升降导轨副2045,其对称地设置在丝杠2042的两侧。与两侧的升降导轨对应地,升降板2043的两侧对称地设置有滑块安装槽2043a,两侧第一升降导轨副2045的滑块通过螺钉安装等方式安装在滑块安装槽2043a上,在丝杠螺母(图未示)带动升降板2043作升降移动时,第一升降导轨副2045起到辅助的导向和受力作用,减少丝杠螺母所受的负载力。
结合图6和图8,为了实现全自动堆叠,就需要自动控制升降板2043上下移动的行程来防止升降板2043高度过低,导致超出获取组件2022下移的行程范围,也要防止升降板2043高度过高,超出第一升降导轨副2045的行程。因此,叠盘机构204上还设置有多个可与控制系统(图未示)电连接的槽型光电感应器,在本实施例中共设置3个,3个槽型光电传感器分别沿竖直方向从上至下排布在托架2041的边缘,并位于靠近载带卷盘2传送方向后侧的升降导轨的旁侧,3个槽型光电传感器的开槽均朝向升降板2043,以便检测。升降板2043设置有感应片2044,该感应片2044设置在升降板2043的边缘上,该侧边缘与该靠近载带卷盘2传送方向后侧的升降导轨对应。感应片2044向托架2041所在方向伸出,当升降板2043作上下移动时,感应片2044从槽型光电传感器的开槽中穿过,产生电信号并传送至步进电机。3个槽型光电传感器分别为第一传感器2046、第二传感器2047和第三传感器2048,显然第二传感器2047位于第一传感器2046和第三传感器2048之间,并且第二传感器2047与另外两个传感器的距离相等。
在堆叠的过程中,叠盘机构204的工作过程如下:若需要堆叠与整形盒206高度相等的载带卷盘2,步进电机先驱动升降板2043上升,直至感应片2044到达第一传感器2046,此时第一传感器2046通过控制系统向步进电机反馈信号,使得升降板2043停止上升,然后,获取组件2022开始释放载带卷盘2至卷盘托板2040上,每释放一个载带卷盘2,步进电机驱动升降板2043下降一个载带卷盘2的高度。在升降板2043下降的过程中,当感应片2044经过第二传感器2047时,向控制系统发出信号,提示堆叠高度已到一半,确认堆叠过程在继续进行。最后,当感应片2044到达第三传感器2048,第三传感器2048通过控制系统向步进电机反馈信号,使得升降板2043停止下降,此次载带卷盘2堆叠完成,可送入整形盒206中。
如图9所示,整形盒206位于叠盘机构204与开盒装置30之间,并可沿第一方向D1来回移动。整形盒206为中空的方形体,其沿第一方向D1的相对两侧为开口结构。在整形盒206与载带卷盘输送线10的末端设有伸缩气缸(图未示),该伸缩气缸具有一可沿第一方向D1伸缩的活塞杆,活塞杆的前端固定有第一推料板(图未示),伸缩气缸(图未示)可驱动推料板(图未示)将堆叠载卷盘托板2040上的载带卷盘2推送至整形盒206内,以使得载带卷盘2叠放整齐。整形盒206旁侧设置有推料入盒机构(图未示),推料入盒机构(图未示)具有推料入盒板(图未示),其可沿第二方向D2移动至整形盒206的移动线上,再沿第一方向D1移动并伸入整形盒206,将整形盒206内的载带卷盘2推进至开盒装置30。其中,第二方向D2垂直于第一方向D1。
在这里,整形盒206沿第一方向D1来回移动的方式可以是通过丝杠副,也可以是通过如本实施方式般采用导轨副,将整形盒206固定在导轨副的滑块的顶部,由于导轨副的工作方式属于现有技术,因此在此不再赘述。
推料入盒机构(图未示)沿第二方向D2来回移动的方式可通过直线模组来实现,也可以如本实施方式这般通过丝杠副和导轨副的结合来实现,具体为,推料入盒机构(图未示)包括设置在机架面板上、沿第二方向D2延伸的导轨副和丝杆副,固定在导轨副的滑块顶部以及丝杆螺母顶部的气缸固定板,以及固定在气缸固定板的推料入盒气缸,推料入盒气缸具有沿第一方向D1伸缩的活塞杆,推料入盒板(图未示)固定在该活塞杆前端。如此,当载有载带卷盘2的整形盒206移向开盒装置30时,丝杆副可驱动气缸固定板进而带动推料入盒气缸沿导轨副的导轨的延伸方向移动,当推料入盒气缸移动至整形盒206移动线时,推料入盒气缸可驱动推料入盒板(图未示)从整形盒206的上游伸入整形盒206内,将堆叠的载带卷盘2送入开盒装置30。
上述的电器机构或零部件(比如卷盘搬运机构202中旋转组件2020、获取组件2022和搬运滑台气缸2026,叠盘机构204中的升降组件)均可与一控制系统(图未示)电连接,由控制系统(图未示)协调控制各动作的进行顺序。
图10和图11示出了本发明载带卷盘包装线中开盒装置一种实施方式的具体结构。如图10和图11所示,位于整形盒206下游的开盒装置30,包括设置在机架面板上的开盒平台300,以及分别设置在开盒平台300沿第二方向D2相对两侧的翻板302和推板304。具体地,翻板302与开盒平台300铰接,可在与开盒平台300平行至与开盒平台300垂直的90°范围内转动,推板304与翻板302对应设置,且推板304可以沿着与载带卷盘2传送方向垂直的方向移动,即可以靠近翻板302或远离翻板302。本实施方式中的包装盒具体为盘式折叠纸盒,其包括四个平面,四个平面依次首尾连接,且两相邻平面可沿连接处可折叠。成型前,包装盒沿相对的两连接处折叠,使未成型包装盒呈扁平状,成型后的包装盒呈矩形体或方形体,而四个平面围合的容置腔可容置载带卷盘2。
在进行开盒动作时,翻板302先是呈水平状态,在未成型包装盒放置并固定在开盒平台300上后,推板304向翻板302方向移动,直至抵住未成型包装盒,同时翻板302向上转动,将未成型包装盒的侧面立起,直至翻板302转动至垂直状态时,包装盒两个侧面分别与翻板302和推板304贴合,并与包装盒底面呈90°,成型完毕。成型后的包装盒正对堆叠装置20的一侧具有开口,堆叠装置20可将已堆叠的载料卷盘2从该开口推入包装盒内。如此,通过在开盒平台300的相对两侧设置翻板302和推板304,并通过升起翻板302,同时推板304抵接包装盒的方式从两侧共同加压使包装盒成型,可提高开盒的到位程度,提升开盒合格率。
进一步,在一些实施例中,开盒平台300包括开盒底板3002、开盒顶盖3004以及真空吸附组件3006。开盒底板3002呈矩形,通过螺钉安装在机架面板上,开盒顶盖3004设置在开盒底板3002上,该开盒顶盖3004包括一个设置有多个吸孔3004a的平板,该平板用于放置未成型包装盒,以及从平板两侧向下延伸的支撑壁,使得开盒顶盖3004和开盒底板3002之间形成一个空间,真空吸附组件3006设置在该空间内。开盒底板3002上还设置有支撑柱3003,在本实施例中支撑柱3003有两根,真空吸附组件3006设置在两支撑柱3003上。真空吸附组件3006包括一个真空吸板3006a,在真空吸板3006a上均匀地设置有多个吸嘴3006b,在本实施例中优选地设置6个,6个吸嘴3006b与开盒顶盖3004上的6个吸孔3004a一一对应,将真空吸板3006a与真空源(图未示)连接,吸嘴3006b便能通过吸孔3004a将吸附力作用在未成型包装盒的底面上,固定未成型包装盒,再进行开盒动作。
为了能在开盒时对未成型包装盒进行吸附,以及开盒完毕后解除吸附,在优选的实施方式中,载带卷盘包装线的开盒装置还包括一个开盒升降气缸306,其通过螺钉安装在开盒底板3002的底面上,该开盒升降气缸306的活塞杆沿第三方向D3伸缩,其中,第三方向D3分别与第一方向D1和第二方向D2平行。开盒升降气缸306的活塞杆向上穿过开盒底板3002后位于真空吸板3006a的下方,活塞杆向上移动时,会与真空吸板3006a抵接,驱动真空吸板3006a向上移动,使得6个吸嘴3006b向上伸入吸孔3004a内,对未成型包装盒的底面产生足够的吸力而固定,可进行开盒动作;活塞杆向下移动时,真空吸板3006a回落,最终回到两支撑柱3003上,此时6个吸嘴3006b距离包装盒较远,解除吸附,包装盒开盒完毕并装载载带卷盘2后就能够移动至载带卷盘输送线10上,进入下一道工序。设置开盒升降气缸306能避免频繁通断真空气源的方式来吸附或解除吸附,提高真空源的耐用度。
翻板302设置在开盒平台300的沿第二方向D2的一侧,用于翻起未成型包装盒的侧面。在优选的实施例中,为提高工作效率,开盒装置30还包括翻板驱动组件308,用于自动翻动翻板302,以实现包装盒的全自动成型。具体来说,机架面板设置有两个立杆3082,两个立杆3082从机架面板向下延伸,分别与开盒顶盖3004的两个支撑壁对应,两个立杆3082的底部设置有螺纹,一连接板3084沿水平方向设置并连接两个立杆3082,并通过设置在螺纹上的多个螺母从连接板3084的上下两侧固定。翻板驱动部件3080设置在连接板3084上靠近翻板302的一端,其底部与连接板3084铰接,其活动端则通过浮动接头(图未示)与翻板302铰接,通过翻板驱动部件3080的驱动,使得翻板302能在水平和垂直状态之间切换,对包装盒进行成型。设置立杆3082和连接板3084来安装翻板驱动部件3080代替了将翻板驱动部件3080安装在更下方的机架1上的方式,可缩短翻板驱动部件3080的行程,驱动时更灵敏。
在这里,翻板驱动部件3080可以是气缸等可以实现伸缩动作的装置,为了节省空间,翻板驱动部件3080优选为笔形气缸,笔形气缸体积较小,适合安装在机架面板下方,节省安装空间,另一方面笔形气缸也适用于高频率使用,适合载带卷盘包装线上频繁的开盒动作。
推板304设置在开盒平台300沿第二方向D2相对翻板302的另一侧,用于抵接包装盒翻起后的另一个侧面。如图11所示,为了在翻起成型防止包装盒意外脱离,在优选的实施例中,翻板302两侧设置有第一限位夹3021,推板304两侧设置有第二限位夹(图未示),第一限位夹3021和第二限位夹均包括两个,且分别对应。当包装盒的侧面被翻板302翻起后,包装盒顶面靠近翻板302的一侧与第一限位夹3021抵接,靠近推板304的一侧则与第二限位夹抵接,使得包装盒的顶面受到两个第一限位夹3021和两个第二限位夹向下的夹持力,防止脱离。
进一步,翻板302上还设置有第三限位夹3023。该第三限位夹3023设置在翻板302的前侧上,当整形盒206将堆叠的载带卷盘2推入已开盒的包装盒中时,包装盒在载带卷盘2的摩擦力带动下也向前移动,造成载带卷盘2在包装盒内放置不到位,因此,设置第三限位夹3023后,第三限位夹3023将包装盒阻挡在第三限位夹3023的后侧,直至载带卷盘2放置到位,翻板302落下后,包装盒才能够从开盒平台300上向包装盒输送线40移动。
进一步,上述开盒装置30和包装盒输送线40之间还设有称重平台,可对完成装盒的包装盒进行称重并记录。
在优选的实施例中,开盒装置30还包括开盒滑台气缸310。在机架面板上,位于开盒平台300的沿第二方向D2相对于翻板302的另一侧设置有一个支撑座311,开盒滑台气缸310设置在该支撑座311上,可沿第二方向D2来回移动,且开盒滑台气缸310的高度高于开盒顶盖3004。开盒滑台气缸310的滑台端与推板304固定连接,在开盒顶盖3004上放置有未成型包装盒时,开盒滑台气缸310驱动推板304向开盒顶盖3004的方向移动,直至抵接并推动未成型包装盒,从翻板302一侧进行开盒动作。选用开盒滑台气缸310的优点在于具有较高的导向精度,其活动端的滑台与推板304形成较大的接触面,能与推板304形成更稳固的连接。在其他实施例中,开盒滑台气缸310也可用其他类型的气缸或者直线导轨模组等代替。
从开盒平台300离开、载有载带卷盘2的包装盒进入包装盒输送线40,包装盒输送线40具体为由多个辊筒组成的辊筒输送线,其第一方向D1延伸。包装盒输送线40驱动载有载带卷盘2的包装盒沿第一方向D1移动。
图13示出了本发明载带卷盘包装线中开箱装置50一种实施方式的具体结构。如图13所示,设置在包装盒输送线40的开箱装置50包括支撑架500、包装箱成型机构502、两个储箱机构504和传送机构508。支撑架500具体呈矩形的镂空结构,其长度方向与第一方向D1相同。两个储箱机构504并列设置在支撑架500的长侧边缘上,分别为第一储箱机构5041和第二储箱机构5042。储箱机构504倾斜设置,均用于储存扁平状的、未成型的包装箱。包装箱成型机构502设置在支撑架500内,其可沿第一方向D1来回移动,当包装箱成型机构502移动至其中一个储箱机构504对应时,可对该储箱机构504上的未成型包装箱进行撑开成型动作。通过设置两个储箱机构504,可分别对多个储箱机构504上的包装箱进行成型,使得在同一包装线上可成型多种规格的包装箱,比如第一储箱机构5041用于存放中号的包装箱,第二储箱机构5042用于存放大号的包装箱,如此可提高不同规格包装箱成型的工作效率,以满足生产需要。当然,储箱机构504的数量可以为两个,也可以为两个以上,这个可根据实际生产需要进行调整。本实施方式中的包装箱具体为瓦楞纸箱,其包括四个平面,四个面依次首尾连接,且两相邻平面可沿连接处折叠。成型前,包装盒沿相对的两连接处折叠,使未成型包装箱呈扁平状,成型后的包装箱呈矩形体或方形体,其四个平面围合形成的容置腔可容置载有载带卷盘的包装盒,而成型后的包装箱沿第三方向D3上下两侧的均为开口,两开口四周具有可折叠的箱页。
如图14所示,第一储箱机构5041具体包括第一支架5041a、第一导箱板5041b和第二导箱板5041c,第一支架5041a呈方框状,其一侧固定在支撑架500的长边的边缘位置,其另一侧向上倾斜地向支撑架500外侧延伸,扁平的、未成型包装箱依次竖直地叠放在倾斜的第一支架5041a上,当最靠近支撑架500内侧的未成型包装箱被取走成型后,与其相邻的包装箱在重力作用下滑落至被吸取的位置处,等待下一次被取走成型。机架1上方正对倾斜的第一支架5041a的位置水平固定有沿第一方向D1延伸的挡杆110,用于抵接未成型包装箱的上部,帮助箱体成型。第一导箱板5041b固定在第一支架5041a沿第一方向D1的边缘位置,并沿第二方向D2延伸,其包括一个用于支撑包装箱底部的底边以及一个用于限制包装箱侧边缘的侧边。与第一导箱板5041b对应,第二导箱板5041c设置在第一支架5041a沿第一方向D1相对第一导箱板5041b的另一侧,并与第一导箱板5041b平行,其也包括一个底边和一个侧边,但与第一导箱板5041b不同的是,第二导箱板5041c可沿第一方向来回移动,因此通过改变第二导箱板5041c和第一导箱板5041b之间的间距,可适应不同尺寸的包装箱规格。
与第一储箱机构5041近似地,第二储箱机构5042包括第二支架5042a、第三导箱板5042b和第四导箱板5042c。第二支架5042a也呈方框状,并固定在支撑架500的长边的边缘位置。第三导箱板5042b固定在第二支架5042a沿第一方向的D1的一侧,而第四导箱板5042c则设置在第二支架5042a沿第一方向D1相对第三导箱板5042b的另一侧。第三导箱板5042b和第四导箱板5042c均沿第二方向D2延伸,其中,第四导箱板5042c可沿第一方向D1来回移动,通过改变第四导箱板5042c和第三导箱板5042b之间的间距,来适应不同的包装箱规格。因此第一储箱机构5041和第二储箱机构5042可以适用于存放不同规格的包装箱,在两个储箱机构504上放置包装箱后,改变包装箱成型机构502所对应的储箱机构504,就能使不同规格的包装箱成型,提高生产效率。
在这里,为实现第二导箱板5041c的沿第一方向D1来回移动,第一支架5041a上还设置了调节丝杆副。具体来说,第一支架5041a沿第二方向D2的相对两侧边框之间设有一沿第二方向D2延伸的支撑部5041e,可辅助支撑未成型包装箱。调节丝杆副包括两个,两个调节丝杆5041d设置在第一支架5041a的边框与支撑部5041e,调节丝杆5041d的一端固定于支撑部5041e,其另一端贯穿第一支架5041a沿第一方向D1的边框。调节丝杆5041d贯穿第一支架5041a的这一端连接有旋柄,第二导箱板5041c的底部通过连接块与两个丝杆滑块固定连接。如此,通过旋转旋柄,可驱动第二导箱板5041c在调节丝杆5041d沿第一方向D1来回移动,达到调节第二导箱板5041c和第一导箱板5041b之间距离的目的。在其他的一些实施例中,也可以通过在第一支架5041a沿第二方向D2的两侧边框上沿左右方向设置多个安装孔,将第二导箱板5041c安装在不同的安装孔上来调节第二导箱板5041c和第一导箱板5041b之间的距离。与第二导箱板5041c原理相同地,第四导箱板5042c也可经过设置在第二支架5042a上的调节丝杆调整位置,以调整第四导箱板5042c和第三导箱板5042b之间的距离,在此不再赘述。
在另一个优选的实施例中,为了使第一储箱机构5041和第二储箱机构5042能兼容不同高度的包装箱,在支撑架500上还设置有第一升降组件511和第二升降组件512,第一升降组件511和第二升降组件512结构相同,分别用于驱动第一支架5041a和第二支架5042a沿第三方向D3作升降移动,其中,第三方向D3分别垂直于第一方向D1和第二方向D2。下面以第一升降组件511为例进行说明:第一升降组件511包括两组丝杆副,两组丝杆副分别位于第一支架5041a的两侧,并竖直地设置在支撑架500上,第一支架5041a两侧设置有升降轴,该升降轴与丝杆副的丝杆螺母连接,因此,转动丝杆顶端的旋柄,就能调节第一支架5041a的高度,来改变第一支架5041a和挡杆110之间的距离,达到兼容不同高度包装箱的目的。第二升降组件512位于第二支架5042a的两侧,与第一升降组件511结构和原理相同,在此不再赘述。
如图15和图16,包装箱成型机构502包括移动支架5020,移动支架5020上设置有吸附组件5022、成型弯臂5024和推箱臂5026。吸附组件5022包括安装臂5022a和吸盘组5022b,安装臂5022a沿第一方向D1延伸设置,移动支架5020沿第一方向D1的一侧设置有导向组件5021,该导向组件5021包括丝杆副和导向轴,该丝杆副和导向轴均沿第二方向D2延伸设置。安装臂5022a的一端设置有一个滑块,该滑块通过丝杆螺母与该丝杆连接,且通过轴承与导向轴滑动连接,同时,该滑块还与一个摆臂5023连接,该摆臂5023的下部与移动支架5020活动连接,移动支架5020的后侧设置有摆臂气缸5025,在摆臂气缸5025驱动下,安装臂5022a可沿丝杆副的轴向方向来回移动。吸盘组5022b设置在安装臂5022a上,吸盘组5022b由四个吸盘组成,成型弯臂5024设置在移动支架5020上,从吸盘组5022b的沿第一方向D1的上游位置向第二方向D2延伸后逐渐弯曲至背向吸盘组5022b的方向延伸。推箱臂5026设置在成型弯臂5024的正上方,并沿第二方向D2延伸,其通过设置在移动支架5020后侧的丝杆副驱动而可以沿第一方向D1来回移动,用于在包装箱成型后将包装箱向与包装盒传送方向同向的下游推出。在工作时,吸盘组5022b吸附储箱机构504上的未成型包装箱其中一个侧面后,吸盘组5022b随安装臂5022a背向储箱机构504的方向移动,在吸盘组5022b的带动下,被吸盘组5022b吸附的包装箱侧面与其沿第二方向D2相对的侧面之间会被稍微撑开,当包装箱移动至成型弯臂5024时,成型弯臂5024与包装箱位于第一方向D1的一侧面抵接,包装箱在成型弯臂5024沿第二方向D2延伸的部分的限位作用下,被进一步撑开成为立体形状,也即包装箱在成型弯臂5024和吸盘组5022b的配合作用下从扁平状被撑开成为立体型。成型后的包装箱呈矩形体或方形体,其四个平面围合形成的容置腔可容置载有载带卷盘的包装盒,而成型后包装箱沿第三方向D3的上下两侧均为开口,两开口四周具有可折叠的箱页。然后,移动支架5020沿导轨向右移动至支撑架500的沿第一方向D1的下游,吸盘组5022b停止吸附包装箱,推箱臂5026向支撑架500沿与包装盒传送方向同向的下游位置移动,将包装箱推出至设置在支撑架500沿第一方向下游的传送机构508上。
包装箱成型机构502需要与两个储箱机构504分别对应,因此,为实现包装箱成型机构502的沿第一方向D1来回移动,在本实施例中,支撑架500的底部设置有两个开箱导轨副514,两个导轨相互平行,并沿第一方向D1延伸设置。移动支架5020固定在两个开箱导轨副514的滑块上,可实现沿导轨的来回移动;支撑架500的前侧设置有支撑架驱动组件516,支撑架驱动组件516也位于支撑架500的底部,与两个开箱导轨副514位于同一高度上,支撑架驱动组件516的活动端与移动支架5020固定连接。因此通过支撑架驱动组件516驱动后,包装箱成型机构502可以在两个导轨来回移动,以实现与第一储箱机构5041或第二储箱机构5042的对应。
进一步,支撑架驱动组件516包括一个横置气缸,该横置气缸缸径大于70mm并小于100mm,避免因为缸径过大而与其他组件发生干涉,同时,缸径在此区间内,气缸能够具有足够的行程来驱动移动支架5020左右移动。在此实施例中,横置气缸的缸径为80mm,最大行程为1400mm。
当包装箱成型机构502与第一储箱机构5041对应时,由于横置气缸的行程过长,容易产生偏心的情况。因此,在此优选实施方案中,包装箱成型机构502包括一个浮动接头5028,该浮动接头5028设置在移动支架5020底侧,与两个开箱导轨副514位于同一高度上,且位于横置气缸的长度方向所在的直线上,以便与横置气缸的活动端连接。浮动接头5028与横置气缸的活动端连接,即使横置气缸的活塞杆伸出到达最大行程,浮动接头5028也能减轻偏心的影响,保持稳定连接。
如图17所示,传送机构508位于所述支撑架500沿第一方向的下游具体为由多个与第二方向D2平行的传送辊筒所组成的辊筒输送线,该传送机构508与包装盒输送线40的末段并列。传送机构508沿第一方向D1的末端设有第一限位件5081,当包装箱碰触到第一限位件5081,则停止继续向前运动;而辊筒输送线的沿第二方向D2相对包装盒输送线40的另一侧设有可沿第二方向D2来回移动的第二限位件5082,其中第二限位件5082为中空的框体,其中空位置允许传送辊筒穿过,以避免在移动过程中干涉传送辊筒转动。当包装箱碰触到第一限位件5081停止继续向前移动后,第二限位件5082沿第二方向D2移动,将包装箱推向包装盒输送线40,再经包装盒输送线40移向装箱平台60。
在这里,为实现第二限位件5082沿第二方向D2移动,可采用导轨副和丝杠副协同工作,具体为,导轨副和丝杠副设置在传送辊筒的下方,其中,导轨副的导轨以及丝杠副的丝杆均沿第二方向D2延伸设置。第二限位件的5082的分别固定在导轨副的滑块以及丝杠副的丝杆螺母上,当采用与丝杆固定连接的驱动电机驱动丝杆转动时,丝杆螺母带动第二限位件5082沿第二方向D2移动。当然,也可以采用伸缩气缸来实现第二限位件5082的移动,具体地,将伸缩气缸的活塞杆朝向包装箱输送线40,并将第二限位件5082固定在伸缩气缸的前端,当伸缩气缸的活塞杆伸缩时,即可驱动第二限位件5082沿第二方向D2移动。
当包装箱移入向装箱平台60的装箱工位后,可通过人工将包装箱的底部贴装胶带封箱,然后将经包装盒输送线40传送的载有载带卷盘2的包装盒装入底部封箱后的包装箱内,完成装箱。然后,装好的包装箱就会被送入码垛线进行顶部封箱以及码垛。
移向装箱平台60的顶部设有可沿第一方向D行进的输送皮带(图未示)。如此,可通过输送皮带将完成入箱的包装箱移至下一工位,而原来靠近包装盒输送线40的工位可放置另一需要装箱的包装箱,这样整个装箱过程可不间断地进行。在这里,可以根据需要设置装箱平台60沿第一方向D1,以允许设置两个、三个甚至更多的工位。
优选地,输送皮带沿第二方向D2的相对两侧分别设有伸向包装盒输送线的导向臂(图未示),且两导向臂(图未示)之间的距离大于包装箱的宽度,包装盒输送线40上的包装箱在导向臂(图未示)的导向作用下,可顺利进入装箱平台60的装箱工位。在一些实施中,两导向臂(图未示)的顶部均匀分布有多个导向轮(图未示),在导向轮(图未示)的作用下,包装箱可更顺畅地进入装箱平台60。
在一些实施例中,为进一步提高开箱装置50的自动化程度,开箱装置50还包括封箱机构506,用于在包装箱底部用胶带自动封箱。如图13和图16所示,封箱机构506设置在支撑架500上,位于开箱导轨副514和传送机构508之间,封箱机构506包括两沿第一方向D1延伸设置的封箱皮带5060、设置在两封箱皮带5060之间的封胶带卷轴组件5062,以及设置在封箱皮带5060上方的封箱挡板5064。在工作时,包装箱成型机构502沿导轨向下游位置移动,将已成型的包装箱送至两封箱皮带5060之间,已成型的包装箱宽度等于两封箱皮带5060之间的距离,两封箱皮带5060驱动包装箱从其之间沿第一方向D1向支撑架500的下游运输,两封箱皮带5060均可通过其底部沿第二方向D2设置的丝杆调节位置,以调整两封箱皮带5060之间的距离,使其兼容不同宽度的包装箱。包装箱从两封箱皮带5060之间穿过时,封胶带卷轴组件5062对包装箱的底部沿两对箱页依次折叠,并将胶带贴装在成型包装箱底部开口两箱页之间沿第一方向D1延伸的缝隙,然后切割胶带,完成底部封箱。同时,在移动时位于封箱皮带5060上方的封箱挡板5064抵接包装箱的顶部,在粘贴胶带时使包装箱保持稳定。由于用于完成粘贴胶带和切割胶带动作的封胶待卷轴组件现有的包装箱成箱装置中已有的结构,属于是现有技术,只要能实现将胶带贴装在成型包装箱底部开口两相对箱页之间的缝隙即可,在此不再详细说明封胶待卷轴组件的具体结构。
当然,如图1和图3所示,开箱装置50的支撑架500顶部可以设置一个矩形体的防护罩,该防护罩的沿第一方向D1的两侧以及相对开箱装置50的另一侧均具有封板(图未示),其中,位于沿第一方向D1下游的封板(图未示)留出一个供包装箱成型后移出的开口。当成型的包装箱移出防护罩的开口后进入传送机构508,继续沿第一方向D1移动。
移向装箱平台60沿第一方向D1的下游位置还可设置称重平台62,以对完成装箱的包装箱进行称重和记录。
作为上述技术方案的其中一种优选方案,上述载带卷盘包装线还包括沿第一方向D1设置在载带卷盘输送线10上游的储料仓70,以及设置在载带卷盘输送线10一侧的取料装置80。
图18示出了本发明载带卷盘包装线中储料仓一种实施方式的具体机构。如图18所示,储料仓70整体呈圆柱体,其具有一可沿圆柱体轴心旋转的旋转底板700,旋转底板700顶部设有具有多个可容置沿第三方向D3叠放的载带卷盘2的容置空间,用于存放载带卷盘2。
图19和图20示出了本发明载带卷盘包装线中取料装置一种实施方式的具体机构。如图19和图20所示,取料装置80具体包括取料机构800、矫正机构802以及视觉检测单元(图未示),取料机构800具体为四轴机器人,其底座安装在机架面板上、并位于载带卷盘输送线10的旁侧。取料机构800具有一可移动的自由端,该自由端可在储料仓70与载带卷盘输送线10之间往返。矫正机构802设置在取料机构800的自由端。矫正机构802包括旋转单元8020和拾取单元8026,旋转单元8020与取料机构800的自由端连接,旋转单元8020具有一旋转端;拾取单元8026则与旋转单元8020的旋转端连接,拾取单元8026用于取得储料仓70处的载带卷盘2,可以通过但不仅限于吸附、夹取等方式获取载带卷盘2。视觉检测单元(图未示)设置在储料仓70的正上方,用于检测储料仓70处的载带卷盘2与预设贴标角度的偏差,并将偏差值信息传递给旋转单元8020。如此,矫正机构802可随取料机构800的自由端移动而移动,并且在此过程中,根据视觉检测单元(图未示)反馈的载带卷盘2角度偏差信息,旋转单元8020驱动拾取单元8026和载带卷盘2一起作旋转移动,直至载带卷盘2转动至预设角度。如此,通过将矫正机构802设置在取料机构800上,在取料机构800搬运载带卷盘2的过程中,矫正机构802可驱动载带卷盘2转动至预设的角度上,而无需在储料仓70和载带卷盘输送线10之间设置定位台放置载带卷盘2来矫正载带卷盘2的位置,提高了整个生产线的生产效率。
其中,如果机架1上罩合有机罩11,则可将视觉检测单元(图未示)设置在机罩11外侧,使其位于储料仓70的正上方。在这里,视觉检测单元(图未示)以及通过视觉检测单元(图未示)检测载带卷盘2角度偏差信息为成熟的现有技术,因此在此就不再对视觉检测单元(图未示)的具体以及工作原理详细说明。
旋转单元8020包括第一支撑件8021和伺服电机8023。第一支撑件8021为双层结构,包括两个大小相同且在上下方向上对应设置的安装板,两个安装板通过设置在安装板两侧的连接杆固定连接。四轴机器人的自由端端通过连接头与上侧的安装板固定连接,伺服电机8023包括两个,分别安装在上方的安装板上,且对称地设置在四轴机器人的自由端的两侧,伺服电机8023沿竖直方向设置,两个伺服电机8023的旋转端向下伸出,通过两个行星减速机8024与两个拾取单元8026连接。因此,在拾取单元8026携带着载带卷盘2随四轴机器人移动时,伺服电机8023驱动拾取单元8026和载带卷盘2旋转,将载带卷盘2矫正至设定的角度,以便在之后的工序中进行贴标签。在其他实施例中,伺服电机8023也可用液压马达等组件代替。
在一些实施例中,拾取单元8026包括两个,每个拾取单元8026均包括一个真空吸盘组件8026a。如图所示,两个伺服电机8023的旋转端分别通过一旋转轴与固定板螺纹连接,两个真空吸盘组件8026a各包括4个真空吸盘,分别安装在固定板底面的四个角上。通过真空吸盘组件8026a对载带卷盘2进行吸附,效果稳定可靠,不易掉落。在另一些的实施例中,真空吸盘也可用针式吸盘、柔性夹爪和电磁夹爪等元件代替,同样可以起到抓取或夹取载带卷盘2的作用。
为增设防呆功能,防止搬运错误的载带卷盘2,在一些实施例中,矫正机构802还包括识别单元8028以及用于安装识别单元8028的第二支撑件8022。第二支撑件8022包括两个,分别设置在第一支撑件8021两侧,识别单元8028也对应地包括两个,分别设置在两个第二支撑件8022上,每个识别单元8028分别负责对一个载带卷盘2进行识别。
在优选的实施例中,第二支撑件8022设置有第一折边8022a和第二折边8022b,第一折边8022a和第二折边8022b分别设置在第二支撑件8022的两端,且均从第二支撑件8022的端部向下延伸。其中,第一折边8022a设置在第二支撑件8022靠近第一支撑件8021的一端,第二折边8022b设置在第二支撑件8022远离第一支撑件8021的一端,显然,第二折边8022b的长度要大于第一折边8022a,第二折边8022b向下延伸,以便能将识别单元8028安装在与载带卷盘2相同的高度上,对载带卷盘2的进行识别。
由于第二支撑件8022两端设置有折边,第一折边8022a用于固定第二支撑件8022,第二折边8022b用于安装识别单元8028,为避免第二支撑件8022因为过于单薄而容易发生变形,在优选的实施例中,第二支撑件8022上设置有加强筋8022c。加强筋8022c设置在第一折边8022a和第二折边8022b之间,具体来说,加强筋8022c设置在第二支撑件8022的底侧,从第一折边8022a背离第一支撑件8021的一侧一直延伸至第二折边8022b靠近第一支撑件8021的一侧。因此,无需增加第二支撑件8022的厚度,通过设置加强筋8022c也能增加第二支撑件8022的强度,防止变形。
在一些实施例中,每个识别单元8028包括一个读码器。读码器体积小,容易安装且能读取移动中的条码和二维码,判定该载带卷盘2是否是错料或混料。读码器可与控制系统(图未示)电连接,每个载带卷盘2旋转两圈,读码器对其进行扫码,当发现载带卷盘2是错料或混料时,读码器发出信号至控制系统,控制系统使整个料盘生产线停机,并发出报警信号,直至操作人员取走该载带卷盘2,料盘生产线才重新开始工作。若载带卷盘2非错料和混料,则伺服电机8023将载带卷盘2旋转至预设的角度,再由四轴机器人放置在载带卷盘输送线10上。
读码器设置在第二折边8022b上,具体地,读码器安装在第二折边8022b与加强筋8022c连接的一侧的底部,并正对着载带卷盘2的侧面。两个读码器设置在两个载带卷盘2的两侧,互不干涉,分别对两个载带卷盘2的条码或二维码进行读取。
在一些优选的实施例中,读码器和靠近载带卷盘输送线10的第二折边8022b之间设置有升降单元8029,升降单元8029的固定端与第二折边8022b固定连接,而升降单元8029的活动端则与读码器连接,显然,靠近载带卷盘输送线10的第二折边8022b的长度小于靠近储料仓70的第二折边8022b,以避免与载带卷盘输送线10发生碰撞。升降单元8029沿竖直方向设置,活动端可沿竖直方向作升降移动,以带动读码器作升降移动,将读码器移动至与载带卷盘2相同的高度上。在四轴机器人搬运载带卷盘2时,升降单元8029将读码器移动至与载带卷盘2相同的高度上,以便进行读码。当四轴机器人带动两个载带卷盘2移动至载带卷盘输送线10上方时,四轴机器人的活动端向下移动,准备将载带卷盘2释放在载带卷盘输送线10上,此时,为了避免位于载带卷盘输送线10上方的读码器与载带卷盘输送线10发生碰撞,升降单元8029的活动端带动读码器向上移动,直至高于载带卷盘2所在的高度,使得在释放载带卷盘2时读码器不与载带卷盘输送线10发生接触。
在另一些优选的实施例中,升降单元8029包括滑台气缸。滑台气缸结构紧凑,更适合安装在第二折边8022b上。读码器安装在滑台的侧面上,具有更稳定的安装效果。
作为上述技术方案的其中另一种优选方案,上述载带卷盘包装线还包括设置在开盒装置30旁侧的包装盒上料装置90。图21-24示出了本发明载带卷盘包装线中开盒装置一种实施方式的具体结构。如图21-24所示,包装盒上料装置90包括包装盒储存仓900、视觉识别组件(图未示)以及包装盒搬运机构902。其中,包装盒储存仓900设置在机架1底部并向上延伸至机架面板的上方,用于叠放多个待使用的未成型包装盒;视觉识别组件(图未示)设置在包装盒储存仓900的正上方,并与包装盒储存仓900对应,视觉识别组件可与控制系统(图未示)电连接,用于识别包装盒储存仓900内最上方的未成型包装盒的角度位置,并将图像传递给控制系统,由控制系统(图未示)判断是否需要旋转;包装盒搬运机构902设置在机架面板上,包括搬运单元9022和取盒单元9020,搬运单元9022具有一可移动的自由端,取盒单元9020设置在搬运单元9022的可移动的自由端上,用于从包装盒储存仓900中取出未成型包装盒,并移动至开盒装置30;包装盒搬运机构902与控制系统(图未示)电连接,如果未成型包装盒需要旋转,控制系统(图未示)向包装盒搬运机构902发出信号后,取盒单元9020可以在搬运单元9022的驱动下在水平方向上旋转,驱动未成型包装盒旋转至与开盒装置30的开盒平台300适配的角度。
具体地,如图22所示,机架面板的长边缘设置有凹位,包装盒储存仓900包括两个,两个包装盒储存仓900尺寸和规格相同,且相邻地设置在凹位上。凹位的沿第二方向D2的内侧竖直设有封板9003。凹位内沿前后方向设置有4个水平导轨副901,水平导轨副901的导轨延第二方向D2延伸,导轨的一端安装在凹位内侧的封板9003上,另一端则向机架1的边缘延伸,每一个包装盒储存仓900安装在两个水平导轨副901的滑块上,如此,每一包装盒储存仓900可以沿第二方向D2来回移动。工作时,若包装盒储存仓900内未放置有未成型包装盒,则包装盒储存仓900沿第二方向D2移出机架1,此时可以向空的包装盒储存仓900内叠放未成型包装盒,在这里,可以是人工向包装盒储存仓900叠放未成型的包装盒,但优选是通过机械手(图未示)实现,以提高效率。然后放置了包装盒的包装盒储存仓900沿第二方向D2重新移向机架1内,取盒单元9020获取该包装盒储存仓900内的未成型包装盒,再进行后续的成型工作。因此,两个包装盒储存仓900交替地由机械手(图未示)向包装盒储存仓900放置未成型包装盒,并交替地由包装盒搬运机构902取走未成型包装盒,载带卷盘包装线可以不间断地进行包装盒成型工作,提高生产效率。显然,为了分别识别两个包装盒储存仓900内的未成型包装盒的位置状态,视觉识别组件包括两个,两个视觉识别组件(图未示)设置在包装盒储存仓900的正上方,与两个包装盒储存仓900分别对应。如果机架1上罩合有机罩11,则可将视觉识别组件(图未示)设置在机罩11上。
在一些实施例中,包装盒储存仓900包括底座9000和限位板9002,当包装盒储存仓900位于机架1内时,以其中一个包装盒储存仓900为例进行说明:每个底座9000安装在两个水平导轨副901的滑块上,在底座9000靠近机架1边缘的一侧上设置有把手9004,通过把手9004可将底座9000沿导轨方拉出至机架1外,或者将底座9000推回机架1内。限位板9002呈杆状,其横截面形状近似“L”字形。四个完全相同的限位板9002设置在底座9000上,并两两对称分布在底座9000的两侧,使得底座9000的上方形成一个可以堆叠未成型包装盒的空间。
为了让取盒单元9020能在包装盒储存仓900逐个地获取未成型包装盒,包装盒上料装置90还包括了两个升降机构904和两个贴标托板906。两个升降机构904分别设置两凹位内,并位于凹位内靠近封板9003的一侧,每个升降机构904与一个包装盒储存仓900对应。贴标托板906的一侧与升降机构904的活动端连接后,另一侧则从两个限位板9002之间穿过,使得贴标托板906水平地设置在底座9000的正上方,在升降机构904的驱动下,贴标托板906可以沿第三方向D3上下移动,当包装盒储存仓900内放置好未成型包装盒,取盒单元9020取走位于最上方的包装盒后,贴标托板906向上移动,将下一个未成型包装盒顶升至被取走的未成型包装盒处,以便取盒单元9020继续取走。
对于升降机构904,可以选择丝杆模组传动、皮带模组传动或直线电机传动等方案在驱动贴标托板906上下移动,本实施例中优选采用丝杆9041传动的方案。每个升降机构904包括一个丝杆直线模组(图未示)和一个步进电机9044,丝杆直线模组的底板9040和丝杆9041沿竖直方向设置,一连接块9042套设在丝杆螺母(图未示)上,底板9040上设置有沿竖直方向设置有第二升降导轨副9046,该连接块9042的一端与第二升降导轨副9046的滑块固定连接,另一端则和贴标托板906固定连接。因此,驱动丝杆9041旋转,丝杆螺母(图未示)、连接块9042和贴标托板906就可在第三方向D3上做升降移动。步进电机9044安装在底板9040的底部,位于底板9040和封板9003之间,且位于对应的两个导轨副之间,可保证步进电机9044不被误触,可以稳定工作。步进电机9044通过同步带连接丝杆9041,驱动丝杆9041旋转。通过控制步进电机9044每次的旋转量,使丝杆螺母每次上升一个未成型包装盒厚度的距离,帮助取盒单元9020在相同的高度位置上取得未成型包装盒,提高了工作效率。
为节省空间和简化装置复杂度,在优选的实施方式中,搬运单元9022具体为一个四轴机器人。该四轴机器人安装在机架面板上,位于两个包装盒储存仓900的一侧,四轴机器人上设置有多级旋转臂,在多级旋转臂的末端设置有一转轴9022a,取盒单元9020安装在该转轴9022a上。通过多级旋转臂调整位置,将取盒单元9020移动到放置有未成型包装盒的包装盒储存仓900上,取盒单元9020取出该包装盒储存仓900内最上方的未成型包装盒后,转轴9022a带动取盒单元9020和该未成型包装盒旋转,直至未成型包装盒旋转至适合进行开盒动作的角度上。
其中,取盒单元9020可用夹持、吸持等方式获取包装盒储存仓900内的未成型包装盒,在优选的实施方案中,取盒单元9020包括一连接架9020a和两第二真空吸盘9020b,两个第二真空吸盘9020b设置在一个连接架9020a上。在转轴9022a底部,转轴9022a通过一个连接头与连接架9020a固定连接,两个第二真空吸盘9020b对称地安装在连接架9020a的前后两侧。当多级旋转臂将两个第二真空吸盘9020b移动至未成型包装盒的正上方后,转轴9022a带动连接架9020a和两个第二真空吸盘9020b下降,吸取未成型包装盒。
视觉识别组件(图未示)包括视觉识别传感器等元件,视觉识别传感器主要有CMOS(Complementary Metal Oxide Semiconductor,互补金属氧化物半导体)相机和CCD(Charge Coupled Device,电荷耦合器件)相机等,在本优选的实施例中,采用CCD相机作为视觉识别传感器,CCD相机具有更高的灵敏度,在识别未成型包装盒的位置状态时具有优势。
本实施例中包装盒上料装置90的工作过程如下:首先,将包装盒储存仓900向前侧拉出机架1外,由设置在机架1外的机械手(图未示)将未成型包装盒堆叠在其中一个包装盒储存仓900内,当一个包装盒储存仓900内堆叠完毕后,将该包装盒储存仓900推回,机械手(图未示)继续在另一个包装盒储存仓900内堆叠未成型包装盒。包装盒储存仓900被推回机架1上之后,其对应的视觉识别组件对包装盒储存仓900内最上方的未成型包装盒进行拍照识别,然后,四轴机器人的多级旋臂转动,使第二真空吸盘9020b位于未成型包装盒正上方,转轴9022a下降,第二真空吸盘9020b吸取未成型包装盒后,向上移出包装盒储存仓900,多级旋臂再次转动,直至将未成型包装盒移动至开合装置30的上方,再将未成型包装盒释放在开盒装置30的开盒平台300上。在多级旋臂转动的过程中,四轴机器人的转轴9022a通过控制系统(图未示)接收到视觉识别组件的反馈,根据该反馈将未成型包装盒在水平方向上旋转至适合开盒的角度。
作为上述技术方案的其中再一种优选方案,上述载带卷盘包装线还包括设置在载带卷盘输送线10旁侧的贴标装置92和打印机94,其中,贴标装置92位于打印机94与载带卷盘输送线10之间,用于可从打印机94取下打印好的标签,再粘贴至位于载带卷盘输送线10上的载带卷盘2上。
图25和图26示出了本发明载带卷盘包装线中贴标装置的具体结构。如图25和图26所示,贴标装置92具体包括贴标旋转架922、旋转驱动机构924、竖直驱动机构926和吸附贴标机构928。具体来说,机架面板上设有一个立柱920,旋转驱动机构924设置在立柱920上,达到足够取下标签和粘贴标签的高度。旋转驱动机构924具有一旋转端,贴标旋转架922安装在旋转驱动机构924的旋转端上,随旋转端一同旋转。竖直驱动机构926包括两个,两个竖直驱动机构926分别设置在贴标旋转架922的两侧,两个竖直驱动机构926的活动端均是竖直向下伸出,两个活动端各自进行升降移动。吸附贴标机构928与竖直驱动机构926对应,也包括两个,两个吸附贴标机构928分别设置在两个竖直驱动机构926的活动端上,随竖直驱动机构926的活动端做升降移动。该贴标装置92的各单元均与控制系统(图未示)电连接,同时各单元上设置有传感器,可向控制系统反馈信息,控制系统接收信息后控制各单元分别进行旋转、升降以及吸附等动作,实现自动控制。
在工作时,靠近打印机94一侧的竖直驱动机构926驱动吸附贴标机构928向下移动,取走打印机94上已打印好的标签后上升,然后旋转驱动机构924带动贴标旋转架922旋转,使得贴标旋转架922上的两个竖直驱动机构926旋转180°,此时,之前靠近打印机94一侧的竖直驱动机构926成为了靠近载带卷盘输送线10一侧的竖直驱动机构926,此竖直驱动机构926再次驱动吸附贴标机构928向下移动,将标签粘贴至载带卷盘2上。与此同时,靠近打印机94一侧的竖直驱动机构926进行前述的取标签动作,待这一侧取标签完毕,另一侧粘贴标签完毕后,旋转驱动机构924再次旋转180°,两侧分别交替进行取标签和粘贴标签的动作,并依此循环。
如此,贴标装置92通过位于两侧的吸附贴标机构928可以同时分别进行取标签和贴标签,旋转驱动机构924驱动两侧的竖直驱动机构926和吸附贴标机构928旋转,因此,旋转驱动机构924每次旋转均可完成一个取标签的动作和一个贴标签的动作,提高了工作效率。
在一些实施例中,贴标装置92还包括水平驱动机构929。水平驱动机构929包括两个,分别水平地设置在贴标旋转架922上,两个水平驱动机构929的活动端分别朝相反方向,且向着贴标旋转架922的外侧伸出,两个水平驱动机构929的活动端分别与一个竖直驱动机构926固定连接,因而可驱动竖直驱动机构926向贴标旋转架922的外侧伸出。采用这种机构,可以保证两个吸附贴标机构928能分别水平移动到打印机94的标签正上方,以及载带卷盘输送线10的正上方,避免因为无法对齐而取不到标签或粘贴位置不准确的情况发生。
如图27所示,在一些实施例中,贴标旋转架922包括上支撑板9220和下支撑板9222,上支撑板9220和下支撑板9222之间通过设置在四个角上的支撑部件连接。上支撑板9220、下支撑板9222和支撑部件既可以如本优选实施例一样采用一体成型的方式制造,也可以通过螺钉安装等方式固定连接。两个水平驱动机构929分别设置在上支撑板9220和下支撑板9222上,为避免松动,通过螺钉安装在两个支撑板上。通过将水平驱动机构929分别设置在上、下两块支撑板上,避免了将两个水平驱动机构929设置在同一高度上,减小了旋转半径,从而减小载带卷盘包装线的贴标装置92的占用空间。
在一些实施例中,每个水平驱动机构929包括一个贴标滑台气缸9290和一个贴标安装板9292。两个水平驱动机构929包括了两个贴标滑台气缸9290,两个贴标滑台气缸9290分别设置在上支撑板9220和下支撑板9222上,贴标滑台气缸9290的滑台向贴标旋转架922的外侧伸出。贴标安装板9292是一块矩形板,与滑台通过螺钉固定连接,沿竖直方向设置在贴标旋转架922的外侧,竖直驱动机构926则安装在贴标安装板9292背离滑台的一侧上,由于贴标安装板9292在竖直方向上的高度与竖直驱动机构926相近,与直接安装在滑台上相比,竖直驱动机构926安装在贴标安装板9292上的安装效果更稳固。
进一步,为了节省贴标滑台气缸9290的行程以降低成本和提高生产效率,上支撑板9220上设置有上延伸部9220a,下支撑板9222设置有下延伸部9222a,上延伸部9220a和下延伸部9222a分别朝向相反的方向,且分别向着远离旋转端的方向延伸。设置在上支撑板9220上的贴标滑台气缸9290的缸体边缘与上延伸部9220a的边缘平齐,也即其滑台从上延伸部9220a的边缘开始向贴标旋转架922的外侧移动,缩短了移动至打印机94或载带卷盘输送线10正上方所需移动的距离,减少了该贴标滑台气缸9290所需的行程。与该贴标滑台气缸9290对应地,设置在下支撑板9222上的贴标滑台气缸9290也如此设置,同样减少了此贴标滑台气缸9290所需的行程。
在优选的实施例中,每个竖直驱动机构926包括一个双导杆滑台气缸。与其他类型的气缸相比,双导杆滑台气缸导向性更强,移动轨迹稳定可靠。此双导杆滑台气缸沿竖直方向安装在贴标安装板9292上,吸附贴标机构928设置在此双导杆滑台气缸位于底侧的活动端,即底侧滑台上,双导杆滑台气缸通过驱动底侧滑台来驱动吸附贴标机构928作升降移动,来进行取标签和粘贴标签的动作。
在优选的实施例中,每个吸附贴标机构928包括一个真空吸板。真空吸板与真空源(图未示)连接,真空吸板在打印机94上取标签时,真空源启动,制造负压吸附标签;真空吸板在载带卷盘2上粘贴标签时,真空源停止工作,防止标签与真空吸板无法分离而不能粘贴。
在优选的实施例中,旋转驱动机构924包括一个旋转气缸。该旋转气缸的缸体设置在立柱920上,保持稳定,旋转气缸的旋转轴设置在缸体顶部,并竖直向上伸出,贴标旋转架922与旋转轴固定连接,旋转气缸驱动旋转轴转动时,贴标旋转架922随旋转轴一同转动。在其他实施例中,旋转驱动机构924也可包括其他的凸轮式旋转机构或曲柄式旋转机构来实现旋转功能。
相较于现有技术,本发明载带卷盘包装线通过载带卷盘输送线传送待包装的载带料盘,通过开盒装置将未成型包装盒立体成型,通过贴标装置将标签印置载带卷盘上,通过堆叠装置将成堆叠状态的载带卷盘装入成型包装盒内,然后通过包装盒输送线朝装箱平台传送,与此同时,通过开箱装置将未成型包装箱立体成型,并将成型包装箱移至包装盒输送线,再经包装盒输送线出传送至装箱平台,最后将载有载带卷盘的包装盒装入装箱平台上的包装箱,完成装箱,可实现载带卷盘的传送,包装盒的开盒和包装箱的开箱,以及载带卷盘的入盒等工序的全自动化,大大提高生产效率;此外,可根据需要选择不同尺寸的包装箱,以不同的包装需求。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,则本发明也意图包含这些改动和变形。