一种应用于涂布机的间隙调整装置及方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及涂布机的技术领域,尤其涉及一种应用于涂布机的间隙调整装置及方法。
背景技术
涂布机,主要用于薄膜、纸张等的表面涂布工艺生产,此机是将成卷的基材涂上一层特定功能的胶、涂料或油墨等,并烘干后收卷。一般采用专用的多功能涂布头,能实现多种形式的表面涂布产生,涂布机的收放卷均配置全速自动接膜机构,PLC程序张力闭环自动控制。现有的钢辊、胶辊之间的中心距的调节机构多采用的是螺纹副直顶或靠两个带斜面的滑块相互滑移来调整,但两辊之间压力大时,操作起来比较费力,精密等级一般在0.05mm。
因此,如何提供一种应用于涂布机,高精度控制两根辊之间的间隙的方案是本领域亟待解决的技术问题。
发明内容
本发明提供一种应用于涂布机的间隙调整装置及方法,以解决现有技术中没有应用于涂布机,高精度控制两根辊之间的间隙的方案的问题。
本发明提供的一种应用于涂布机的间隙调整装置,包括:第一堒、第二堒、精密螺杆、精密行星减速器、精密顶杆及间隙调整控制器;其中,
所述第一堒与第二堒相对设置,两者相隔堒间间隙;所述第一堒固定在第一固定座,并随所述第一固定座移动;
所述精密顶杆,包括:顶杆顶头及与其相对的顶杆伸缩传动端,所述顶杆顶头连接至第一固定座,带动所述第一固定座移动;所述顶杆伸缩传动端连接至所述精密螺杆的传动端;
所述精密螺杆,连接在所述精密顶杆与精密行星减速器之间,与所述精密行星减速器配合两级减速带动所述精密顶杆移动;
所述精密行星减速器,连接在所述精密螺杆及所述间隙调整控制器之间,受所述间隙调整控制器控制正转/反转,进而增大/减小所述堒间间隙。
可选地,其中,所述间隙调整控制器,为手轮,通过手轮连接杆连接至所述精密行星减速器,所述手轮转动带动所述精密行星减速器。
可选地,其中,所述间隙调整控制器,包括:控制电机和控制终端,所述控制电机连接至所述精密行星减速器,通过正转/反转带动所述精密行星减速器正转/反转;所述控制终端,连接至所述控制电机,为接收增加/减小所述堒间间隙的控制指令并控制所述控制电机进行正转/反转的终端。
可选地,其中,所述控制终端,为接收增加/减小所述堒间间隙的调节行程指令,根据所述调节行程控制所述控制电机进行正转/反转达到所述调节行程的终端。
可选地,其中,所述控制终端,为根据预设条件参数与行程对应关系及输入条件参数,得到所述堒间间隙的所述调节行程,根据所述调节行程控制所述控制电机进行正转/反转达到所述调节行程的终端。
另一方面,本发明还提供一种应用于涂布机的间隙调整方法,实施于应用于涂布机的间隙调整装置,该装置包括:第一堒、第二堒、精密螺杆、精密行星减速器、精密顶杆及间隙调整控制器;其中,
所述第一堒与第二堒相对设置,两者相隔堒间间隙;所述第一堒固定在第一固定座,并随所述第一固定座移动;
所述精密顶杆,包括:顶杆顶头及与其相对的顶杆伸缩传动端,所述顶杆顶头连接至第一固定座,带动所述第一固定座移动;所述顶杆伸缩传动端连接至所述精密螺杆的传动端;
所述精密螺杆,连接在所述精密顶杆与精密行星减速器之间,与所述精密行星减速器配合两级减速带动所述精密顶杆移动;
所述精密行星减速器,连接在所述精密螺杆及所述间隙调整控制器之间,受所述间隙调整控制器控制正转/反转,进而增大/减小所述堒间间隙;
该方法包括:
所述间隙调整控制器接收增大/减小所述堒间间隙的控制指令,带动所述精密行星减速器正转/反转;
所述精密行星减速器与精密螺杆配合两级减速带动所述精密顶杆移动;
所述精密顶杆移动带动所述精密顶杆伸缩,进而带动所述第一固定座朝着所述第二堒/远离所述第二堒的方向移动,实现增大/减小所述第一堒与第二堒中心距的所述堒间间隙。
可选地,其中,所述间隙调整控制器,为手轮,通过手轮连接杆连接至所述精密行星减速器,
正向转动所述手轮转动带动所述精密行星减速器正向转动;
反向转动所述手轮转动带动所述精密行星减速器反向转动。
可选地,其中,所述间隙调整控制器,包括:控制电机和控制终端,所述控制电机连接至所述精密行星减速器,
所述控制终端,接收增加/减小所述堒间间隙的控制指令并控制所述控制电机进行正转/反转;
通过所述控制电机正转/反转带动所述精密行星减速器正转/反转。
可选地,其中,该方法还包括:
所述控制终端接收增加/减小所述堒间间隙的调节行程指令;
根据所述调节行程控制所述控制电机进行正转/反转达到所述调节行程。
可选地,其中,所述控制终端,根据预设条件参数与行程对应关系及输入条件参数,得到所述堒间间隙的所述调节行程;
根据所述调节行程控制所述控制电机进行正转/反转达到所述调节行程。
本发明的应用于涂布机的间隙调整装置及方法,通过应用高精度星行减速器与高精密螺纹副结构配合调节两堒之间的间距,精度达到0.001mm,且操作起来比较轻松,且外形美观。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
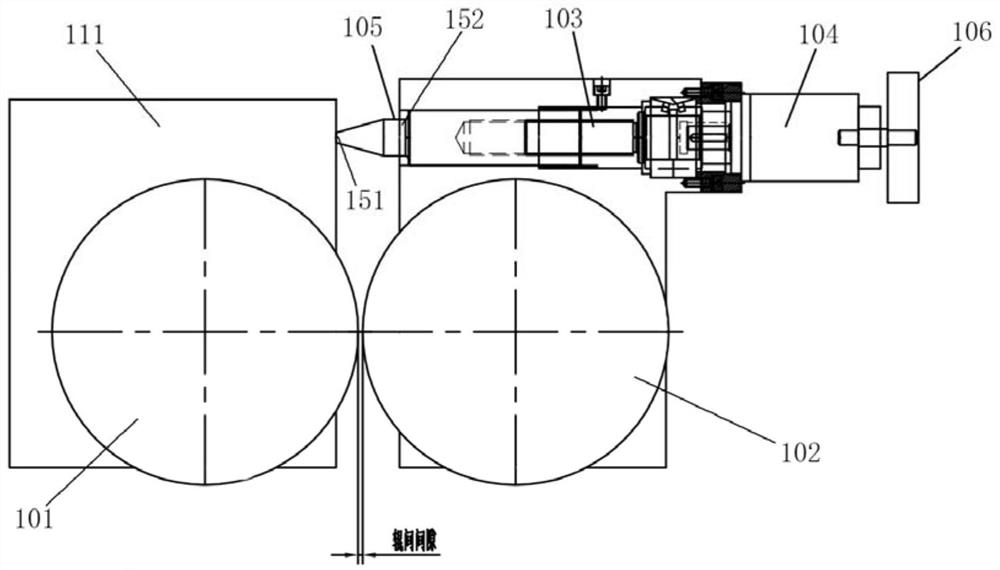
图1是本发明实施例中一种应用于涂布机的间隙调整装置的示意图;
图2是本发明实施例中一种应用于涂布机的间隙调整方法的流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1和2所示,图1是本实施例中一种应用于涂布机的间隙调整装置的示意图;图2是本实施例中一种应用于涂布机的间隙调整方法的流程示意图。具体地,该实施例的应用于涂布机的间隙调整装置,包括:第一堒101、第二堒102、精密螺杆103、精密行星减速器104、精密顶杆105及间隙调整控制器106。
其中,第一堒101与第二堒102相对设置,两者相隔堒间间隙;第一堒101固定在第一固定座111,并随第一固定111座移动。
精密顶杆105,包括:顶杆顶头151及与其相对的顶杆伸缩传动端152,顶杆顶头连接至第一固定座111,带动第一固定座移动;顶杆伸缩传动端连接至精密螺杆的传动端。
精密螺杆103,连接在精密顶杆与精密行星减速器之间,与精密行星减速器配合两级减速带动精密顶杆移动;
精密行星减速器104,连接在精密螺杆103及间隙调整控制器106之间,受间隙调整控制器控制正转/反转,进而增大/减小堒间间隙。
在一些可选的实施例中,间隙调整控制器106,为手轮,通过手轮连接杆连接至精密行星减速器,手轮转动带动精密行星减速器。
在一些可选的实施例中,间隙调整控制器106,包括:控制电机和控制终端,控制电机连接至精密行星减速器,通过正转/反转带动精密行星减速器正转/反转;控制终端,连接至控制电机,为接收增加/减小堒间间隙的控制指令并控制控制电机进行正转/反转的终端。
在一些可选的实施例中,控制终端,为接收增加/减小堒间间隙的调节行程指令,根据调节行程控制控制电机进行正转/反转达到调节行程的终端。
在一些可选的实施例中,控制终端,为根据预设条件参数与行程对应关系及输入条件参数,得到堒间间隙的调节行程,根据调节行程控制控制电机进行正转/反转达到调节行程的终端。
在一些可选的实施例中,本实施例的应用于涂布机的间隙调整方法,实施于应用于涂布机的间隙调整装置,该装置包括:第一堒、第二堒、精密螺杆、精密行星减速器、精密顶杆及间隙调整控制器;其中,
第一堒与第二堒相对设置,两者相隔堒间间隙;第一堒固定在第一固定座,并随第一固定座移动;
精密顶杆,包括:顶杆顶头及与其相对的顶杆伸缩传动端,顶杆顶头连接至第一固定座,带动第一固定座移动;顶杆伸缩传动端连接至精密螺杆的传动端;
精密螺杆,连接在精密顶杆与精密行星减速器之间,与精密行星减速器配合两级减速带动精密顶杆移动;
精密行星减速器,连接在精密螺杆及间隙调整控制器之间,受间隙调整控制器控制正转/反转,进而增大/减小堒间间隙;
该方法包括:
步骤201、间隙调整控制器接收增大/减小堒间间隙的控制指令,带动精密行星减速器正转/反转。
步骤202、精密行星减速器与精密螺杆配合两级减速带动精密顶杆移动。
步骤203、精密顶杆移动带动精密顶杆伸缩,进而带动第一固定座朝着第二堒/远离第二堒的方向移动,实现增大/减小第一堒与第二堒中心距的堒间间隙。
在一些可选的实施例中,间隙调整控制器,为手轮,通过手轮连接杆连接至精密行星减速器,
正向转动手轮转动带动精密行星减速器正向转动;
反向转动手轮转动带动精密行星减速器反向转动。
在一些可选的实施例中,间隙调整控制器,包括:控制电机和控制终端,控制电机连接至精密行星减速器,
控制终端,接收增加/减小堒间间隙的控制指令并控制控制电机进行正转/反转;
通过控制电机正转/反转带动精密行星减速器正转/反转。
在一些可选的实施例中,该方法还包括:
控制终端接收增加/减小堒间间隙的调节行程指令;
根据调节行程控制控制电机进行正转/反转达到调节行程。
在一些可选的实施例中,控制终端,根据预设条件参数与行程对应关系及输入条件参数,得到堒间间隙的调节行程;
根据调节行程控制控制电机进行正转/反转达到调节行程。
本实施的方案实现了两辊之间的中心距的微调。
工作步骤原理:在精密涂布机设备中,高精度两辊对压的结构通常需要高精度控制两根辊之间的间隙
本结构通过精密螺杆+精密星行减速器两级减速机构,达到大的减速比和大的扭矩从而可以精密控制辊间间隙,选择合适的减速比,顶杆的移动量可以达到0.001mm的级别。通过应用高精度星行减速器+高精密螺纹副结构,精度达到0.001mm,且操作起来比较轻松,外形美观,操作简单、省力。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围,均应包含在本发明的保护范围之内。