一种混合灵敏度优化的CMG框架系统速度调节方法
文献发布时间:2023-06-19 09:38:30
技术领域
本发明属于伺服系统控制领域,具体涉及一种控制力矩陀螺(CMG,controlmoment gyroscope)框架系统干扰抑制控制方法。
背景技术
控制力矩陀螺是应用于航天器上的一类惯性执行机构,通过角动量交换产生内部力矩从而对航天器进行控制,与动量轮相比,控制力矩陀螺的输出力矩远大于动量轮的输出力矩(通常在数百倍以上),具有较高的能效比;与喷气推力器相比,控制力矩陀螺既能提供大的控制力矩,又能精确、连续地输出力矩,且只消耗电能,在航天领域受到广泛关注与应用,尤其是大型航天器(例如Skylab、国际空间站、天宫系列航天器)和高机动灵敏航天器(WorldView系列对地观测卫星、Pleiades光学遥感卫星)等。
CMG由陀螺转子系统(高速旋转的转子、转子支承系统、陀螺房、高速驱动电机)和框架伺服系统(框架体、电机、滑环、角位置传感、支承系统)等组成,其中陀螺转子系统提供角动量,框架伺服系统转动从而迫使角动量变化,由于陀螺效应CMG生成输出力矩,这个力矩作用在航天器上用于航天器的姿态控制。所以,框架伺服系统速度控制性能直接决定CMG的输出力矩精度,为获得高精度的输出力矩,实现高精度的姿态控制,必须研究高性能框架伺服系统的控制方法。
然而框架系统速度调节精度受到复杂多源干扰的阻碍,例如转子动不平衡引起的振动干扰力矩、非线性摩擦力矩、齿槽力矩、电流摄动等干扰。上述多源干扰囊括了不同频段的干扰信号,例如转子动不平衡引起的振动干扰力矩高达100赫兹以上,而非线性摩擦力矩齿槽力矩、电流摄动等扰动可视为慢变干扰信号,所以不同频段分布的多源干扰给框架系统速度调节控制器设计带来了严峻的挑战。因此,在多源干扰情况下保障控制力矩陀螺框架系统速度调节精度是一项关键技术,对航天器高精度姿态控制具有重要意义。
目前,针对控制力矩陀螺框架系统速度调节问题,国内外专家学者提出很多控制方法,文章《基于模糊PID的控制力矩陀螺外框架控制技术》利用模糊控制器实时在线修正PID调节器参数,实现对轴承摩擦干扰的抑制并改善传统PID跟踪性能及调节时间,但该论文未考虑其他干扰对CMG框架系统的影响。专利申请号201810781296.3提出了一种基于离散型非线性级联扩张状态观测器的控制力矩陀螺框架系统扰动抑制方法,该专利通过选择合适非线性函数构建离散型非线性级联扩张状态观测器对系统受到的集总干扰进行估计,并结合滑模控制器在输出通道消除集总干扰的影响,此方法将多种干扰视为一类集总干扰去处理具有一定的保守性。综上所述,现有方法无法解决CMG框架系统实际工作中面对不同频段多源干扰的高精度速度调节问题。
发明内容
本发明要解决的技术问题是:针对控制力矩陀螺框架系统实际工作过程中面对多源干扰的影响造成速度调节精度低的问题,提供一种混合灵敏度优化的CMG框架系统速度调节方法,抑制并补偿多源干扰对框架系统的影响,提高控制力矩陀螺框架系统速度调节精度,从而保障航天器高精度姿态控制,该方法具有结构灵活简单、抗干扰能力强、工程实用性强等优点。
本发明解决上述技术问题采用的技术方案为:一种混合灵敏度优化的CMG框架系统速度调节方法,具体包括以下步骤:
第一步,根据控制力矩陀螺框架系统转速输出量与电流输入量之间的动力学建立框架系统标称模型;
第二步,选择合适混合灵敏度加权函数并利用Matlab鲁棒控制工具箱求解鲁棒控制器保障框架系统动态性能与低频干扰抑制能力;
第三步,对转子动不平衡引起的高频振动干扰建立干扰模型并设计干扰观测器对其进行估计与补偿;
第四步,将第二步设计的鲁棒控制器与第三步设计的干扰观测器进行复合,从而完成基于混合灵敏度优化的控制力矩陀螺框架系统速度调节方法。
其实施步骤如下:
第一步,根据控制力矩陀螺框架系统转速输出与电流输入之间的动力学建立框架系统标称模型:
其中,ω,i
第二步,择混合灵敏度加权函数并利用Matlab鲁棒控制工具箱求解鲁棒控制器保障框架系统动态性能与低频干扰抑制能力;
首先,建立框架系统的混合灵敏度函数:
其中、S(s),T(s)分别为控制力矩陀螺框架系统灵敏度函数、补灵敏度函数;K(s)为待设计的鲁棒控制器;G
其次,选择混合灵敏度函数加权函数,使得期望性能归结为H
其中,S(s),T(s)分别为控制力矩陀螺框架系统灵敏度函数、补灵敏度函数;K(s)为待设计的鲁棒控制器;W
然后,利用Matlab鲁棒控制工具箱求解鲁棒控制器K(s)。
第三步,对转子动不平衡引起的高频振动干扰建立干扰模型并设计干扰观测器对其进行估计与补偿:
首先,对转子动不平衡引起的高频振动干扰建立干扰模型:
其中T
然后,设计干扰观测器对转子动不平衡引起的高频振动干扰进行估计:
其中,
第四步,将第二步设计的鲁棒控制器与第三步设计的干扰观测器进行复合,从而完成基于混合灵敏度优化的控制力矩陀螺框架系统速度调节方法,复合控制器为:
其中,i
有益效果:
本发明与现有技术相比的优点在于:本发明通过选择合适混合灵敏度加权函数并利用Matlab鲁棒控制工具箱求解鲁棒控制器满足框架系统动态性能与低频干扰抑制能力,并设计转子动不平衡引起的高频振动干扰进行估计与补偿,形成一种复合控制器,满足控制力矩陀螺框架伺服动态性能要求,并可有效地增强控制力矩陀螺框架系统对多频段干扰的抗干扰能力,该方法具有结构灵活简单、抗干扰能力强、工程实用性强等优点,可有效地保障控制力矩陀螺框架系统面临多源干扰情况下的速度调节精度。
附图说明
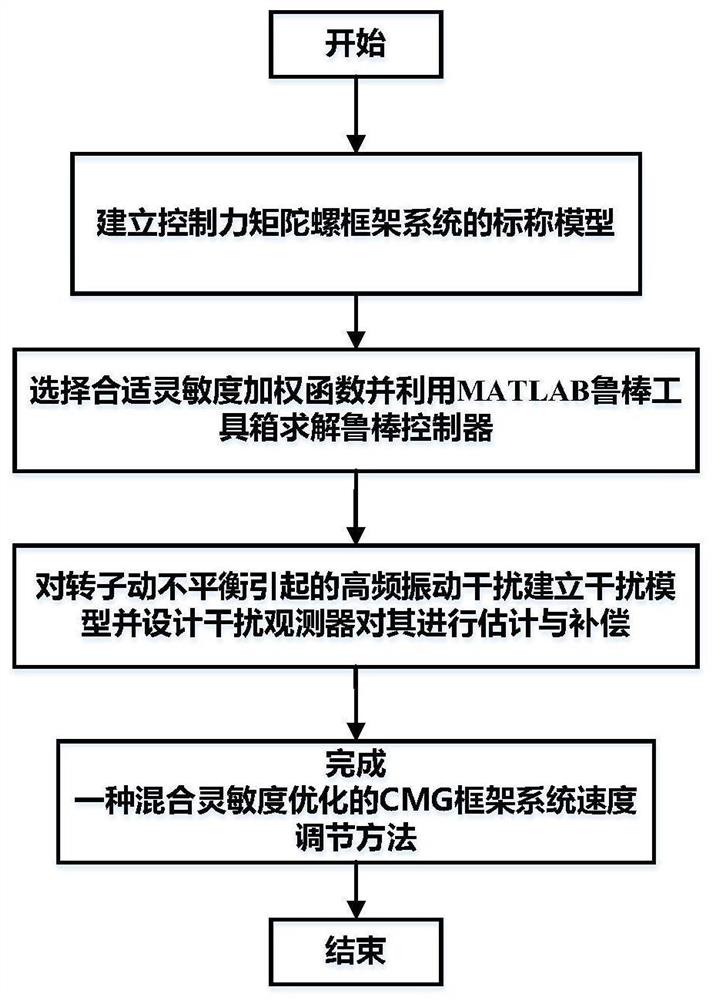
图1为本发明的基于混合灵敏度优化的控制力矩陀螺框架系统速度调节方法流程图;
图2为本发明的基于混合灵敏度优化的控制力矩陀螺框架系统速度调节方法复合控制器示意图;
图3为基于本方法的控制力矩陀螺框架系统速度调节性能示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅为本发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域的普通技术人员在不付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
控制力矩陀螺CMG由陀螺转子系统(高速旋转的转子、转子支承系统、陀螺房、高速驱动电机)和框架系统(框架体、电机、滑环、角位置传感、支承系统)等组成,通过框架绕框架轴的转动,带动转子系统使CMG的角动量方法发生改变,从而产生一定的输出力矩用于航天器的姿态控制。
本发明一种混合灵敏度优化的CMG框架系统速度调节方法步骤流程图如图1所示,为:
首先在控制力矩陀螺框架系统实际运行环境中收集相关参数样本信息,根据控制力矩陀螺框架系统转速输出量与电流输入量之间的动力学建立框架系统标称模型;其次,选择合适混合灵敏度加权函数并利用Matlab鲁棒控制工具箱求解鲁棒控制器保障框架系统动态性能与低频干扰抑制能力;然后,对转子动不平衡引起的高频振动干扰建立干扰模型并设计干扰观测器对其进行估计与补偿;最后将所设计的鲁棒控制器与干扰观测器进行复合,复合控制器如图2所示,从而完成基于混合灵敏度优化的控制力矩陀螺框架系统速度调节方法。
具体实施步骤如下:
第一步,根据控制力矩陀螺框架系统转速输出与电流输入之间的动力学建立框架系统标称模型:
其中,ω,i
第二步,选择混合灵敏度加权函数并利用Matlab鲁棒控制工具箱求解鲁棒控制器保障框架系统动态性能与低频干扰抑制能力:
首先,建立框架系统的混合灵敏度函数:
其中、S(s),T(s)分别为控制力矩陀螺框架系统灵敏度函数、补灵敏度函数;K(s)为待设计的鲁棒控制器;G
其次,选择混合灵敏度函数加权函数,使得期望性能归结为H
其中,S(s),T(s)分别为控制力矩陀螺框架系统灵敏度函数、补灵敏度函数;K(s)为待设的鲁棒控制器;W
然后,利用Matlab鲁棒控制工具箱求解鲁棒控制器K(s):
第三步,对转子动不平衡引起的高频振动干扰建立干扰模型并设计干扰观测器对其进行估计与补偿:
首先,对转子动不平衡引起的高频振动干扰建立干扰模型:
其中T
然后,设计干扰观测器对转子动不平衡引起的高频振动干扰进行估计:
其中,
第四步,将第二步设计的鲁棒控制器与第三步设计的干扰观测器进行复合,从而完成基于混合灵敏度优化的控制力矩陀螺框架系统速度调节方法,如图2所示,复合控制器为:
其中,i
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,且应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
- 一种混合灵敏度优化的CMG框架系统速度调节方法
- 一种混合灵敏度优化的CMG框架系统速度调节方法