一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及建筑爬架设备的技术领域,特别涉及一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置。
背景技术
建筑爬架装置(也称为爬升设备)是工程建设施工剪力墙体系和筒体体系的钢筋混凝土结构的一种有效的模板体系,常在高层建筑、高体量结构施工中运用,世界各国都已广泛推广应用。
目前的建筑爬架设备一般包含有用于高空焊接的智能焊接设备,但是目前的智能焊接设备存在以下几个问题:1、因为在焊接时焊接头的角度调节不到位,导致焊接头与焊接点的位置不正对,产生偏差,最终导致焊接不到位,容易出现虚焊;2、目前焊接时无设置防护措施,导致容易高空掉落配件,存在安全隐患,故此需要改进。
发明内容
本发明的目的在于针对当下市场对日用防护服的需求,提出了的一种能够解决现有技术中无设置防护措施,存在安全隐患,同时焊接不到位的一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置。
为实现上述目的,本发明提供如下技术方案:一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,包括高空升降机,在高空升降机上设置有能够升降的升降台,在升降台上设有夹持焊接机构,所述的夹持焊接机构包括以下设备:
一个固定座,所述的固定座位于高空升降机上;
一个第一气缸,所述的第一气缸设于固定座上;
一个与第一气缸输出连接的第一支架;
一个固定在第一支架上的第二气缸;
一个与第二气缸的活塞杆连接的第二支架;
一个与第二支架铰接的第三支架;
一个与第三支架铰接的焊接设备,所述的焊接设备包括焊枪,在焊枪的尾部设有智能水平仪,在焊接设备与第三支架的铰接部设有第二电机;
其中,所述的第二支架通过第一转轴与第三支架铰接,在第一转轴侧边设有驱动第一转轴旋转的第一电机,在高空升降机的侧边设有控制器,所述的第一气缸驱动焊接设备上下移动,所述的第二气缸驱动焊接设备左右移动,所述的智能水平仪与控制器电连接,在控制器内预设有左右两根钢架需要焊接后的倾斜夹角以及预设夹角阈值,在控制器上还连接有报警器,所述报警器是当智能水平仪的倾斜角度减去控制器内的倾斜夹角的值在夹角阈值内进行报警提示作用,在固定座的侧边设有位于智能水平仪下方的防护漏网,所述的防护漏网上设有位于固定座上的第三气缸,所述第三气缸驱动防护漏网水平移动。
进一步,在防护漏网的侧边设有防护挡板。
进一步,在防护漏网的底部设有与控制器电连接的压力感应器。
进一步,在防护漏网的底部设有缓冲层。
进一步,在焊枪头部的下方设有接料盘。
进一步,在控制器上还电连接有显示器。
进一步,高空升降机上的下方设有推车,在高空升降机的侧边设有称重块。
进一步,所述的第三支架为匚字形结构,在第三支架的前端横杆上设有所述焊接设备,在第三支架的后端横杆上设有柔性机械手,所述的柔性机械手通过气动设备驱动控制夹口大小,所述的第三支架的纵杆与第二支架铰接。
进一步,在柔性机械手的内侧设有硅胶层。
本发明得到的一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,其具有以下技术效果:
先驱动高空升降机工作带动升降台上移动,利用第一气缸带动焊接设备上下移动,来靠近需要焊接的位置,同时通过第二气缸左右移动来靠近需要焊接的位置,此时利用焊枪对产品进行自动焊接,在焊接过程中通过智能水平仪实施监测焊枪的角度,再发送给控制器,由于控制器内预设有左右两根钢架需要焊接后的倾斜夹角以及预设夹角阈值,在控制器上还连接有报警器,所述报警器通过当智能水平仪的倾斜角度减去控制器内的倾斜夹角的值在夹角阈值内进行报警提示作用,同时进行调节焊枪角度,以实现焊枪的角度在预设的角度,避免由于焊枪角度不符合要求而导致虚焊的问题发生,同时通过驱动第三气缸保证防护漏网位于智能水平仪下方,起到防护作用,提高安全性。
附图说明
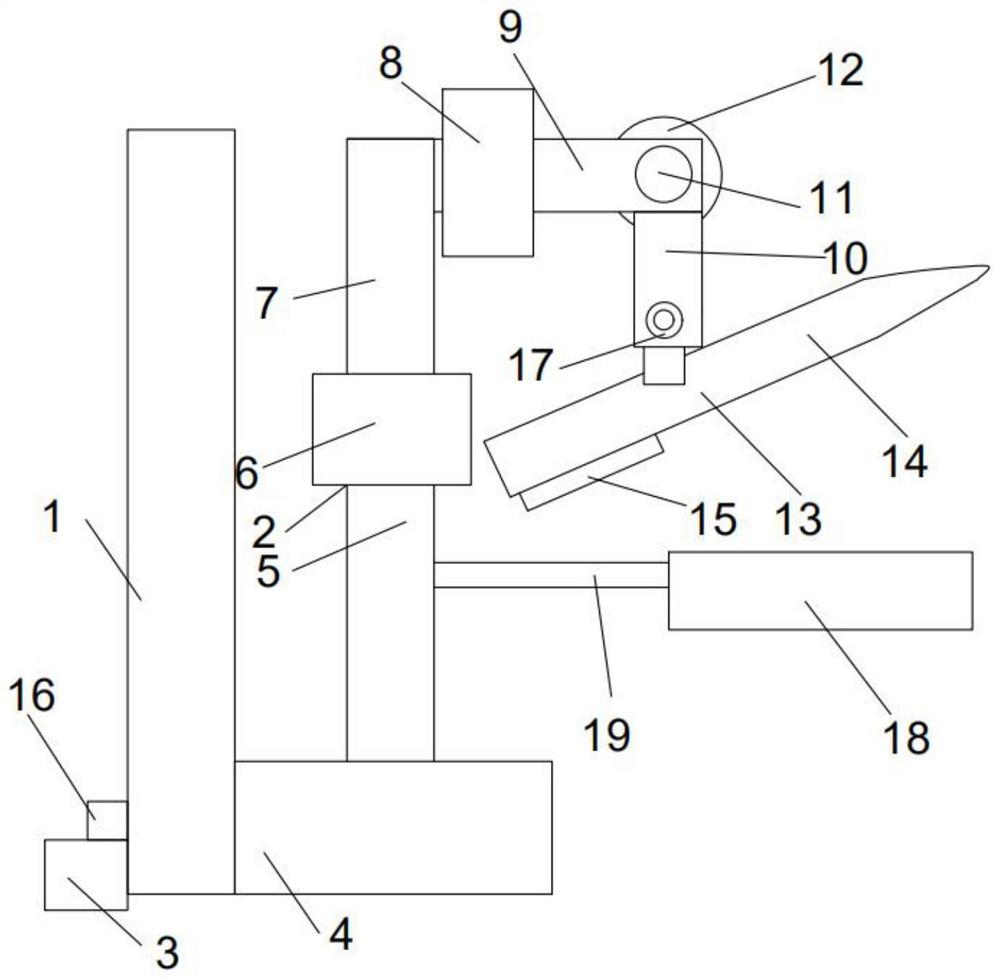
图1是本实施例1中一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置的结构示意图。
图2是本实施例2中一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置的结构示意图。
图3是本实施例3中一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置的结构示意图。
图4是本实施例4中一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置的结构示意图。
图5是本实施例5中一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置的结构示意图。
图6是本实施例6中一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置的结构示意图。
图7是本实施例7中第三支架与柔性机械手的连接示意图。
图中:高空升降机1、夹持焊接机构2、控制器3、升降台4、固定座5、第一气缸6、第一支架7、第二气缸8、第二支架9、第三支架10、第一转轴11、第一电机12、焊接设备13、焊枪14、智能水平仪15、报警器16、第二电机17、防护漏网18、第三气缸19、压力感应器20、防护挡板21、缓冲层22、接料盘23、显示器24、推车25、称重块26、前端横杆10-1、后端横杆10-2、柔性机械手27、纵杆10-3、硅胶层28。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
请参阅图1,本实施例提供了一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,包括高空升降机1,在高空升降机1上设置有能够升降的升降台4,在升降台4上设有夹持焊接机构2,所述的夹持焊接机构2包括以下设备:
一个固定座5,所述的固定座5位于高空升降机1上;
一个第一气缸6,所述的第一气缸6设于固定座5上;
一个与第一气缸6输出连接的第一支架7;
一个固定在第一支架7上的第二气缸8;
一个与第二气缸8的活塞杆连接的第二支架9;
一个与第二支架9铰接的第三支架10;
一个与第三支架10铰接的焊接设备13,所述的焊接设备13包括焊枪14,在焊枪14的尾部设有智能水平仪15,在焊接设备13与第三支架10的铰接部设有第二电机17;
其中,所述的第二支架9通过第一转轴11与第三支架10铰接,在第一转轴11侧边设有驱动第一转轴11旋转的第一电机12,在高空升降机1的侧边设有控制器3,所述的第一气缸6驱动焊接设备13上下移动,所述的第二气缸8驱动焊接设备13左右移动,所述的智能水平仪15与控制器3电连接,在控制器3内预设有左右两根钢架需要焊接后的倾斜夹角以及预设夹角阈值,在控制器3上还连接有报警器16,所述报警器16是当智能水平仪15的倾斜角度减去控制器3内的倾斜夹角的值在夹角阈值内进行报警提示作用,在固定座5的侧边设有位于智能水平仪15下方的防护漏网18,所述的防护漏网18上设有位于固定座5上的第三气缸19,所述第三气缸19驱动防护漏网18水平移动。
工作时,先驱动高空升降机1工作带动升降台4上移动,利用第一气缸带动焊接设备13上下移动,来靠近需要焊接的位置,同时通过第二气缸左右移动来靠近需要焊接的位置,此时利用焊枪14对产品进行自动焊接,在焊接过程中通过智能水平仪15实施监测焊枪14的角度,再发送给控制器3,由于控制器3内预设有左右两根钢架需要焊接后的倾斜夹角以及预设夹角阈值,在控制器3上还连接有报警器16,所述报警器16通过当智能水平仪15的倾斜角度减去控制器3内的倾斜夹角的值在夹角阈值内进行报警提示作用,同时进行调节焊枪14角度,以实现焊枪14的角度在预设的角度,避免由于焊枪14角度不符合要求而导致虚焊的问题发生,同时通过驱动第三气缸19保证防护漏网18位于智能水平仪15下方,起到防护作用,提高安全性。
实施例2:
请参阅图2,本实施例提供了一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,进一步,在防护漏网18的侧边设有防护挡板21,通过设置防护挡板21提高防护效果。
实施例3:
请参阅图3,本实施例提供了一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,进一步,在防护漏网18的底部设有与控制器3电连接的压力感应器20,通过设置压力感应器20能够实现监测掉落的物品过大而压坏防护漏网18无法起到安全防护作用。
实施例4:
请参阅图4,本实施例提供了一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,进一步,在防护漏网18的底部设有缓冲层22,通过设置缓冲层22避免废料掉出。
实施例5:
请参阅图5,本实施例提供了一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,进一步,在焊枪14头部的下方设有接料盘23,通过设置接料盘23避免焊接过程中掉落废料。
实施例6:
请参阅图6,本实施例提供了一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,进一步,在控制器3上还电连接有显示器24,通过设置显示器24,方便显示数据信息。
进一步,高空升降机1上的下方设有推车25,在高空升降机1的侧边设有称重块26,通过设置推车25方便移动,通过设置称重块26避免上部过重,而倾斜。
实施例7:
请参阅图7,本实施例提供了一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置,进一步,所述的第三支架10为匚字形结构,在第三支架10的前端横杆10-1上设有所述焊接设备13,在第三支架10的后端横杆10-2上设有柔性机械手27,所述的柔性机械手27通过气动设备驱动控制夹口大小,所述的第三支架10的纵杆10-3与第二支架9铰接,通过设置柔性机械手27实现在焊接前同步将焊接产品进行固定夹紧,进一步提高焊接效果。
进一步,在柔性机械手27的内侧设有硅胶层28,通过设置硅胶层28提高夹紧效果。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种具有防护结构的建筑爬架设备机器人柔性智能焊接装置
- 一种建筑爬架设备机器人柔性智能焊接生产设备