一种方向盘力感模拟电机控制器参数整定方法
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及汽车技术领域,具体涉及一种方向盘力感模拟电机控制器参数整定方法。
背景技术
随着计算机技术的快速发展,虚拟驾驶技术正在智能驾驶领域发挥着越来越重要的作用。方向盘作为汽车转向系统的重要组成部分,对车辆的整体安全性和舒适性具有重要意义。在虚拟驾驶仿真过程中加入方向盘虚拟系统可以使虚拟驾驶的可信度更高、虚拟驾驶实验数据更可靠。使用电机和扭杆共同组成的虚拟驾驶硬件系统具有结构简单,可控性高等优点,然而,考虑到电机控制本身的复杂性和PID控制器具有的鲁棒性和敏捷性,将PID控制器嵌入到电机控制系统中可以获得反应快、效果好的控制系统。但是,方向盘力感模拟系统是一个较为复杂的非线性系统,对该系统中的PID控制器参数进行整定是一个具有挑战性的难题。《机电技术》2020年第04期上报道的论文《基于模糊PID的驾驶模拟器方向盘力反馈系统设计》提出了使用模糊PID控制器提高方向盘回力的可信度,但是并不涉及使用改进粒子群算法对PID控制器进行优化,且模糊PID控制器对系统硬件要求较高,对硬件要求较高。因此,为了解决方向盘力感模拟电机控制器的参数整定问题,需要开发一种原理简单、计算速度快、鲁棒性好的智能算法。
发明内容
为了解决上述技术问题,本发明主要的目的在于提供一种方向盘力感模拟电机控制器参数整定方法,以解决方向盘力感模拟系统电机控制器的参数整定问题。
为了实现上述目的,本发明提供如下技术方案:
一种方向盘力感模拟电机控制器参数整定方法,包括以下步骤:将电机PID控制器嵌入方向盘力感模拟电机控制系统中;运用改进的粒子群优化算法迭代优化电机PID控制器参数,获得最佳电机PID控制器参数组合;将最佳电机PID控制器参数组合存储至电机控制器硬件中,使PID控制器能够离线工作。
进一步地,改进的粒子群优化算法包括以下步骤:
步骤a、初始化算法基本参数,所述算法基本参数包括最大迭代次数T、粒子群规模N、粒子位置、粒子维度D、粒子位置取值范围、最大聚集数量r
步骤b、逐个计算第i代每个粒子位置对应的适应度;
步骤c、按照粒子位置与全局最优粒子位置之间的欧氏距离进行排序,适应度越优,排序越靠前;
步骤d、计算第i代聚集数量:
r
式(1)中,r
步骤e、根据第i代聚集数量值,将粒子划分为聚集粒子和非聚集粒子,即1~floor(N·r
步骤f、进行粒子位置迁移,得到第i+1代粒子:
聚集粒子的学习方式:
x
非聚集粒子的学习方式:
x
式(2)和式(3)中,i表示当前代数;j表示粒子的序号;x表示迁移粒子位置;w表示权重因子;p表示当前代适应度最优粒子位置;g表示全局适应度最优粒子位置;d表示维度;rand表示[0,1]区间内的随机小数,取1.5;c
步骤g、判断粒子是否超出边界,超出则进行位置随机重置;
步骤h、判断是否达到最大迭代次数T,达到了就输出最佳适应度和全局最优粒子位置,没有则跳转到步骤b,反之则输出全局最优粒子位置g和相应的全局最有适应度Fit
进一步地,运用所述改进的粒子群优化算法优化电机PID控制器参数的步骤中,所述电机PID控制器以电机理论输出扭矩和其实际输出扭矩的差为输入,以电机的调节电流为输出;所述改进的粒子群优化算法中的每个粒子代表一个PID参数组合K
由于采用上述技术方案,本发明达到以下技术效果:本发明开发了一种改进的粒子群优化算法,运用改进的粒子群优化算法优化电机PID控制器参数,解决了方向盘力感模拟电机控制器的参数整定问题,该算法具有原理简单、计算速度快、鲁棒性好的优点。
附图说明
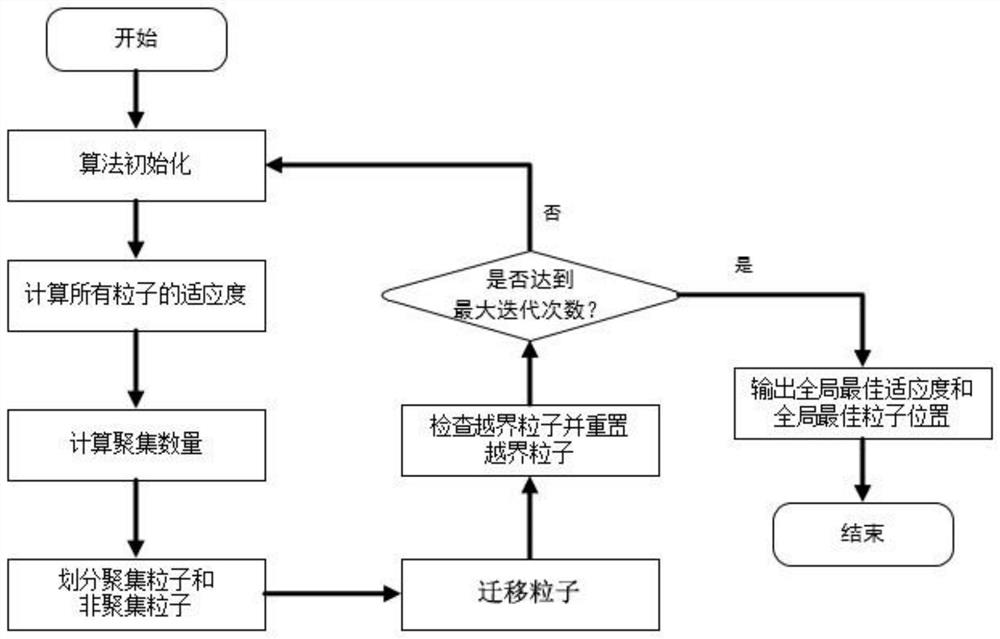
图1是本发明改进的粒子群优化算法的运行过程示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明,下面将结合实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所做的等效变化与修饰前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
首先请参考图1。根据本发明一种方向盘力感模拟电机控制器参数整定方法为:将电机PID控制器嵌入方向盘力感模拟电机控制系统中;运用改进的粒子群优化算法迭代优化电机PID控制器参数,获得最佳电机PID控制器参数组合;将最佳电机PID控制器参数组合存储至电机控制器硬件中,使PID控制器能够离线工作。其中,结合图1所示,改进的粒子群优化算法的简要步骤为:
开始;
算法初始化;
计算所有粒子的适应度;
计算聚集数量;
划分聚集粒子和非聚集粒子;
迁移粒子;
检查越界粒子并重置越界粒子;
判断粒子是否达到最大迭代次数,是则输出全局最佳适应度和全局最佳粒子位置,结束;否则返回算法重新计算所有粒子的适应度。
具体地,运用改进的粒子群优化算法优化电机PID控制器参数的具体步骤包括:
步骤a1、设置算法基本参数,所述算法基本参数包括最大迭代次数T、粒子群规模N、粒子位置、粒子维度D、粒子位置取值范围、最大聚集数量r
步骤b1、逐个将每一个粒子位置,即每一个PID参数组合带入方向盘力感模拟电机PID控制器中,得到对应的实际电机输出力矩和理论电机输出扭矩误差的均方根值,即每个粒子的适应度值;
步骤c1、按照粒子位置与全局最优粒子位置之间的欧氏距离进行排序,适应度越优,排序越靠前;
步骤d1、根据式(1)计算第i代聚集数量r
r
式(1)中,r
步骤e1、根据第i代聚集数量值,将粒子划分为聚集粒子和非聚集粒子,即1~floor(N·r
步骤f1、根据式(2)和式(3)进行粒子位置迁移,得到第i+1代粒子:
x
x
式(2)和式(3)中,i表示当前代数;j表示粒子的序号;x表示迁移粒子位置;w表示权重因子;p表示当前代适应度最优粒子位置;g表示全局适应度最优粒子位置;d表示维度;rand表示[0,1]区间内的随机小数,取1.5;c
步骤g1、判断粒子是否超出边界,超出则进行位置随机重置:
步骤h1、判断是否达到最大迭代次数T,达到了就输出最优适应度和全局最优粒子位置,没有达到则跳转到步骤b,反之则输出全局最优粒子位置g和相应的全局最优适应度Fit
最后,手动将改进的粒子群优化算法得到的最佳PID参数组合烧进离线控制器硬件中,完成电机PID参数整定。
以上所述仅为本发明较佳的实施方式,并非用以限定本发明的保护范围;同时,以上的描述对于相关技术领域中具有通常知识者应可明了并据以实施,因此其他未脱离本发明所揭露概念下所完成之等效改变或修饰,都应涵盖在本发明的保护范围之内。
- 一种方向盘力感模拟电机控制器参数整定方法
- 一种方向盘力感模拟电机控制器参数整定方法