滚动式防拉丝点胶机器人
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及一种滚动式防拉丝点胶机器人。
背景技术
在芯片卡封装过程,一般采用单头式点胶设备,在进行点胶时,需要对芯片进行精确定位后再进行点胶作业,位置偏差容错率低,效率较比,而且,在点胶结束后,点胶设备与芯片之间间距产生便化时,经常出现拉丝现象,影响点胶质量。
发明内容
本发明的目的在于克服以上所述的缺点,提供一种滚动式防拉丝点胶机器人。
为实现上述目的,本发明的具体方案如下:
一种滚动式防拉丝点胶机器人,包括有底板、定位机构、第一支架、推力驱动件、点胶支架和滚动式点胶机构;所述底板具有矩形孔,所述底板上设有两个齿条,所述两个齿条分别对应位于所述矩形孔的两个长边上;所述定位机构包括有定位基座、电极板和多个定位单元,所述定位基座设于所述底板的底面上并位于所述矩形孔的正下方;所述电极板设于所述定位基座的底面上;所述多个定位单元呈矩阵阵列设于所述定位基座上,每个所述定位单元均包括有静电吸附环、电磁线圈、绝缘弹性体和导通探针,所述电磁线圈、静电吸附环均嵌设于所述定位基座内,且,所述静电吸附环位于所述电磁线圈的上方,所述导通探针活动贯穿于所述静电吸附环、电磁线圈的中心孔,且,所述导通探针的两端可活动贯穿所述定位基座,所述导通探针还与所述电磁线圈电性接触,所述绝缘弹性体套设于所述导通探针上并位于所述电磁线圈的中心孔内;所述第一支架设于所述底板的一端;所述推力驱动件设于所述第一支架上;所述点胶支架固定连接在所述推力驱动件的输出端上;所述滚动式点胶机构包括有空心结构的滚轴架、对应设于滚轴架两端上的两个边盖以及呈圆周阵列排列在滚轴架圆周表面的多个点胶单元,所述滚轴架的两端转动连接在所述点胶支架上,所述滚轴支架与所述两个边盖之间形成有容胶腔体,两个所述边盖上分别固定套接有齿轮,两个所述齿轮分别一一对应与所述两个齿条啮合,所述多个点胶单元与所述多个定位单元在所述矩形孔的宽度方向上一一对应设置,每个所述点胶单元均包括空心结构的点胶本体、点胶活塞、永磁体、点胶针、出胶管和拉力弹簧;所述点胶本体具有顶盖,所述顶盖开设有进胶通孔,所述进胶通孔用于所述点胶本体内部与所述容胶腔体之间的连通,所述进胶通孔上设有进胶阀,所述点胶本体的侧壁上沿其长度方向上开设有进气通道,所述进气通道的上端口靠近所述点胶本体的上端,所述进气通道内设有进气阀;所述点胶活塞设于所述点胶本体内,并将所述点胶本体内分隔为上腔和下腔,所述点胶活塞的中部设有出胶通孔,所述出胶通孔内设有出胶阀;所述永磁体固定在所述点胶活塞的底面;所述点胶针固定在点胶本体的底端;所述出胶管的一端固定在所述永磁体的中部、并与所述出胶通孔连通,所述出胶管的另一端贯穿所述点胶本体后伸入所述点胶针内;所述拉力弹簧设于点胶本体内,并位于所述下腔内,所述拉力弹簧的两端分别抵接在所述点胶本体和永磁体上。
其中,所述导通探针设有限位凸环,所述限位凸环的外径大于所述静电吸附环的内径,所述限位凸环在所述绝缘弹性体的弹力作用下抵靠在所述静电吸附环的底面,所述限位凸环与电磁线圈电性接触。
其中,所述点胶本体的侧壁上对称设有两个进气通道,所述两个进气通道内均设有进气阀。
其中,所述进胶阀、进气阀、出胶阀均为弹性阀片。
其中,所述进气阀的刚度小于所述进胶阀的刚度。
其中,所述边盖上设有注胶通孔,所述注胶通孔与所述容胶腔体连通。
其中,还包括第二支架,所述第二支架设于所述底板的另一端,所述第一支架与第二支架之间间隔连接有两个导向杆,所述点胶支架的两端分别对应通过直线轴承活动套接在所述两个导向杆上。
本发明的有益效果为:本发明通过设置定位单元受压产生磁场,然后利用产生磁场的定位单元一一对应驱动滚动式点胶机构的点胶单元进行点胶作业,能够对待点胶的芯片的规格、位置、方向均能自动适应,从而无需对待点胶的芯片进行精确定位,使得芯片位置偏差容错率高,同时采用多头式点状点胶,胶液分散,且能够避免拉丝现象的发生。
附图说明
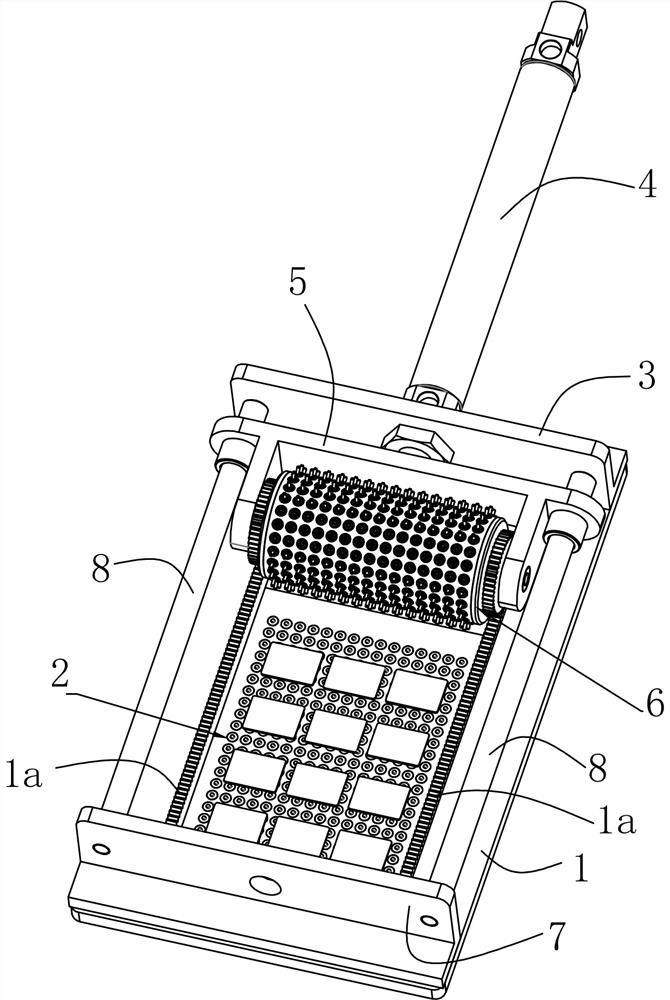
图1是本发明的立体图;
图2是本发明的滚动式点胶机构的立体图;
图3是本发明的点胶单元的立体图;
图4是本发明的点胶单元的一剖面示意图;
图5是本发明的定位机构的立体图;
图6是本发明的定位机构的一剖视图
图7是图6中I处的局部结构放大示意图;
附图标记说明:1、底板;1a、齿条;2、定位机构;2a、定位基座;2b、电极板;2c、定位单元;2c1、静电吸附环;2c2、电磁线圈;2c3、绝缘弹性体;2c4、导通探针;3、第一支架;4、推力驱动件;5、点胶支架;6、滚动式点胶机构;61、滚轴架;62、边盖;63、点胶单元;63a、点胶本体;63b、点胶活塞;63c、永磁体;63d、点胶针;63e、出胶管;63f、拉力弹簧;63g、顶盖;63h、进胶阀;63i、进气通道;63j、进气阀;63k、出胶阀;64、齿轮;7、第二支架;8、导向杆。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细的说明,并不是把本发明的实施范围局限于此。
如图1至图7所示,本实施例所述的一种滚动式防拉丝点胶机器人,包括有底板1、定位机构2、第一支架3、推力驱动件4、点胶支架5和滚动式点胶机构6;所述底板1具有矩形孔,所述底板1上设有两个齿条1a,所述两个齿条1a分别对应位于所述矩形孔的两个长边上;所述定位机构2包括有定位基座2a、电极板2b和多个定位单元2c,所述定位基座2a设于所述底板1的底面上并位于所述矩形孔的正下方;所述电极板2b设于所述定位基座2a的底面上;所述多个定位单元2c呈矩阵阵列设于所述定位基座2a上,每个所述定位单元2c均包括有静电吸附环2c1、电磁线圈2c2、绝缘弹性体2c3和导通探针2c4,所述电磁线圈2c2、静电吸附环2c1均嵌设于所述定位基座2a内,且,所述静电吸附环2c1位于所述电磁线圈2c2的上方,所述导通探针2c4活动贯穿于所述静电吸附环2c1、电磁线圈2c2的中心孔,且,所述导通探针2c4的两端可活动贯穿所述定位基座2a,所述导通探针2c4还与所述电磁线圈2c2电性接触,所述绝缘弹性体2c3套设于所述导通探针2c4上并位于所述电磁线圈2c2的中心孔内;所述第一支架3设于所述底板1的一端;所述推力驱动件4设于所述第一支架3上;所述点胶支架5固定连接在所述推力驱动件4的输出端上;所述滚动式点胶机构6包括有空心结构的滚轴架61、对应设于滚轴架61两端上的两个边盖62以及呈圆周阵列排列在滚轴架61圆周表面的多个点胶单元63,所述滚轴架61的两端转动连接在所述点胶支架5上,所述滚轴支架与所述两个边盖62之间形成有容胶腔体,两个所述边盖62上分别固定套接有齿轮64,两个所述齿轮64分别一一对应与所述两个齿条1a啮合,所述多个点胶单元63与所述多个定位单元2c在所述矩形孔的宽度方向上一一对应设置,每个所述点胶单元63均包括空心结构的点胶本体63a、点胶活塞63b、永磁体63c、点胶针63d、出胶管63e和拉力弹簧63f;所述点胶本体63a具有顶盖63g,所述顶盖63g开设有进胶通孔,所述进胶通孔用于所述点胶本体63a内部与所述容胶腔体之间的连通,所述进胶通孔上设有进胶阀63h,所述点胶本体63a的侧壁上沿其长度方向上开设有进气通道63i,所述进气通道63i的上端口靠近所述点胶本体63a的上端,所述进气通道63i内设有进气阀63j;所述点胶活塞63b设于所述点胶本体63a内,并将所述点胶本体63a内分隔为上腔和下腔,所述点胶活塞63b的中部设有出胶通孔,所述出胶通孔内设有出胶阀63k;所述永磁体63c固定在所述点胶活塞63b的底面;所述点胶针63d固定在点胶本体63a的底端;所述出胶管63e的一端固定在所述永磁体63c的中部、并与所述出胶通孔连通,所述出胶管63e的另一端贯穿所述点胶本体63a后伸入所述点胶针63d内;所述拉力弹簧63f设于点胶本体63a内,并位于所述下腔内,所述拉力弹簧63f的两端分别抵接在所述点胶本体63a和永磁体63c上。
本实施例,优选地,进气阀63j设置在进气通道63i的上端口处,避免有胶液进入进气通道63i内造成堵塞;所述推力驱动件4为推力气缸;本实施例中,优选地,所述进胶阀63h、进气阀63j、出胶阀63k均为弹性阀片;所述进气阀63j的刚度小于所述进胶阀63h的刚度。
本实施例的工作方式是:初始状态时,胶液存储在容胶腔体内,定位机构2上的导通探针2c4在绝缘弹性体2c3的弹性作用下向外伸出,滚动式点胶机构6的拉力弹簧63f经由永磁体63c拉动点胶活塞63b朝向点胶针63d方向移动,当点胶活塞63b处于进气阀63j的上方时,随着点胶活塞63b的移动,点胶本体63a的上腔为负压,使得顶盖63g上的进胶阀63h打开,如此通过顶盖63g的进胶通道,点胶本体63a的上腔与容胶腔体连通,胶液进入点胶本体63a的上腔,接着在点胶活塞63b下移超过进气阀63j片后,进气通道63i上的进气阀63j打开,外界空气经由进气通道63i被吸入点胶本体63a的上腔内,由于空气的密度小于胶液的密度,被吸入的空气聚集在胶液顶部,并在穿过胶液的时候形成空气泡,直至拉力弹簧63f处于平衡状态;
工作时,首先外界机械手将待点胶的芯片放置在定位基座2a上,与芯片接触的多个定位单元2c中的静电吸附环2c1对芯片产生静电吸附力,由于导通探针2c4处于伸出状态,此时芯片在静电吸附力的作用下,下压导通探针2c4,使得导通探针2c4与电极板2b电性接触,此时导通探针2c4将电极板2b与电磁线圈2c2电性接通,电磁线圈2c2通电产生与永磁体63c磁性相同的磁场,而其他没有与芯片接触的定位单元2c,由于导通探针2c4没有受到下压力,不会产生磁场,然后推力气缸经由点胶支架5推动整个滚动式点胶机构6平移,同时由于滚动式点胶机构6的两个齿轮64与底板1上的两个齿条1a分别配合,驱动滚轴架61带动多个点胶单元63转动及平移,随着滚轴架61上的点胶单元63滚动及平移,当部分点胶单元63位于芯片的正上方时,该部分点胶单元63处于竖直方向上,而由于在矩形孔的宽度方向上,点胶单元63与定位单元2c一一对应,此时,点胶单元63的永磁体63c对应与定位单元2c的电磁线圈2c2之间的距离最近,与芯片接触的定位单元2c产生的磁场对应作用在与这些定位单元2c一一对应的部分点胶单元63上,使得该部分点胶单元63的永磁体63c受到定位单元2c中电磁线圈2c2产生的磁场的磁性排斥力作用下,带动点胶活塞63b克服拉力弹簧63f的弹力向上移动,使得点胶本体63a的上腔的体积减小,压强增大,压缩点胶本体63a的上腔内的空气,此时点胶活塞63b上的出胶阀63k打开,胶液经由出胶通孔进入出胶管63e内,经由出胶管63e进入点胶针63d内,再点在芯片表面上,由于空气泡聚集在胶液的末端,在胶液排出后上腔内的压缩空气泡喷出,对点胶针63d内进行隔离冲刷,阻断排出的胶液与点胶针63d之间的连接,使得点胶后不回产生拉丝现象,随着滚轴架61的转动及平移,点胶完成的点胶单元63随着滚轴架61转动,逐渐脱离磁性排斥力的作用,并在拉力弹簧63f的作用下,点胶活塞63b复位,并同步将胶液和外界空气注入到点胶本体63a的上腔内,等待下一次的点胶动作,同时滚轴架61带动下一组与芯片对应的点胶单元63进行点胶,且与上一点胶区域间隔一定距离,如此在芯片上间隔点胶,从而形成多头式点状点胶,点胶分散,直至芯片上完成点胶作业,然后外界机械将点胶作业完成的芯片转移出点胶工作区,接着推力气缸带动整个滚动式点胶机构6复位,在复位过程中,由于没有定位单元2c受到压力,即没有磁场产生,滚动式点胶机构6的每个点胶单元63均不会排出胶液。
本实施例通过设置定位单元2c受压产生磁场,然后利用产生磁场的定位单元2c一一对应驱动滚动式点胶机构6的点胶单元63进行点胶作业,能够对待点胶的芯片的规格、位置、方向均能自动适应,从而无需对待点胶的芯片进行精确定位,使得芯片位置偏差容错率高,同时采用多头式点状点胶,胶液分散,且能够避免拉丝现象的发生。
基于上述实施例的基础上,进一步地,所述导通探针2c4设有限位凸环,所述限位凸环的外径大于所述静电吸附环2c1的内径,所述限位凸环在所述绝缘弹性体2c3的弹力作用下抵靠在所述静电吸附环2c1的底面,所述限位凸环与电磁线圈2c2电性接触。如此设置,利用限位凸环与静电吸附环2c1的底面配合,对导通探针2c4进行限位,避免导通探针2c4在绝缘弹性体2c3的弹性复位作用下脱离,结构更可靠。
基于上述实施例的基础上,进一步地,所述点胶本体63a的侧壁上对称设有两个进气通道63i,所述两个进气通道63i内均设有进气阀63j。如此设置,保证点胶本体63a内进气均衡,结构更合理。
基于上述实施例的基础上,进一步地,所述边盖62上设有注胶通孔,所述注胶通孔与所述容胶腔体连通。如此设置,以便向容胶腔体内注入胶液,同时胶液存储在滚轴架61内,滚轴架61转动时对胶液进行搅拌,胶液分散性以及温度分布均匀性更好。
基于上述实施例的基础上,进一步地,还包括第二支架7,所述第二支架7设于所述底板1的另一端,所述第一支架3与第二支架7之间间隔连接有两个导向杆8,所述点胶支架5的两端分别对应通过直线轴承活动套接在所述两个导向杆8上。如此设置,使得滚动式点胶机构6在滚动和平移过程中更稳定,精确度更高。
以上所述仅是本发明的一个较佳实施例,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,包含在本发明专利申请的保护范围内。
- 滚动式防拉丝点胶机器人
- 连续作业式防拉丝点胶机器人整机