火箭发动机试验双机实时控制系统及切换方法
文献发布时间:2023-06-19 10:11:51
技术领域
本发明涉及火箭发动机试验控制技术,具体涉及一种火箭发动机试验双机实时控制系统及切换方法。
背景技术
在火箭发动机试验中,对控制系统的要求很高,试验点火过程的控制设备不允许出现异常情况。
目前,为了提高控制系统的可靠性,采用高性能单套嵌入式计算机控制设备,该种控制方式简单便捷,但在使用过程中,由于计算机等电子产品的可靠性存在小概率异常事件,使计算机硬件存在出现异常现象的风险,进而导致火箭发动机点火试验任务失败。
发明内容
为了解决现有火箭发动机试验采用计算机控制设备,存在计算机硬件异常的风险,导致发动机点火试验任务失败的技术问题,本发明提供了一种火箭发动机试验双机实时控制系统及切换方法。
为实现上述目的,本发明提供的技术方案是:
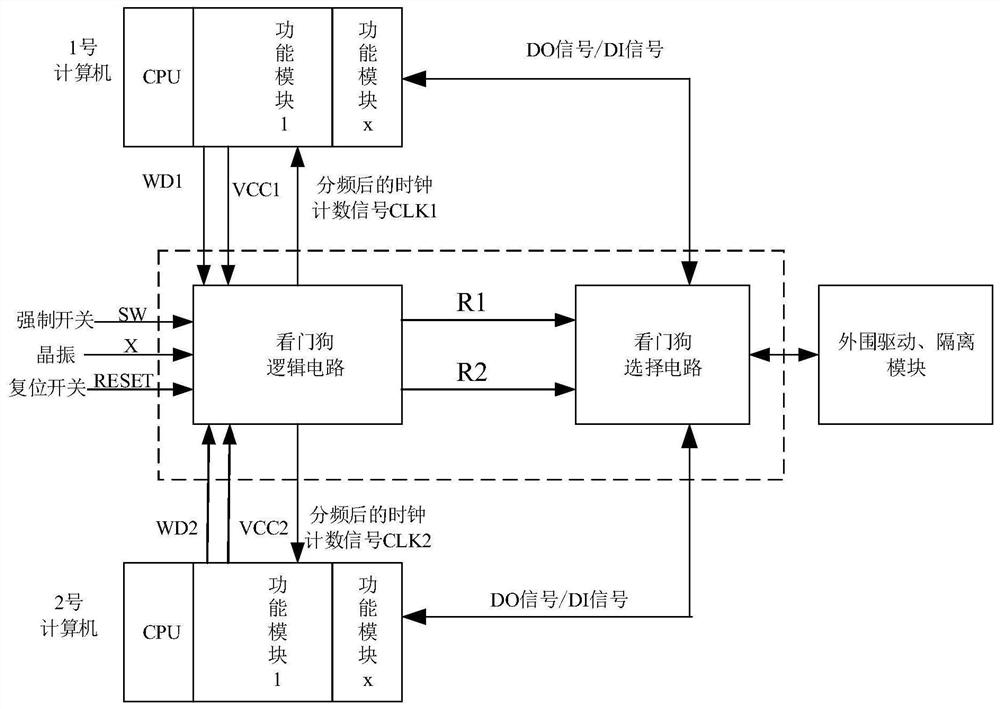
一种火箭发动机试验双机实时控制系统,其特殊之处在于:包括1号计算机、2号计算机、看门狗逻辑电路、看门狗选择电路、强制开关、复位开关及晶振,1号计算机和2号计算机为相同配置的嵌入式计算机;
所述1号计算机用于向看门狗逻辑电路发送看门狗信号WD1和电源信号VCC1;
所述2号计算机用于向看门狗逻辑电路发送看门狗信号WD2和电源信号VCC2;
所述强制开关用于向看门狗逻辑电路发送控制权强制转换信号SW;
所述复位开关用于向看门狗逻辑电路发送复位脉冲信号RESET;
所述晶振用于向看门狗逻辑电路发送时钟频率,经分频后产生时钟计数信号CLK1和时钟计数信号CLK2,分别为1号计算机和2号计算机提供时钟信号;
所述看门狗逻辑电路用于向看门狗选择电路发送1号计算机控制权信号R1以及2号计算机控制权信号R2;
1号计算机和2号计算机分别通过看门狗选择电路向执行元器件发送开关量输出DO,并接收执行元器件发送的开关量输入DI。
进一步地,所述看门狗信号WD1、看门狗信号WD2、电源信号VCC1、电源信号VCC2、控制权强制转换信号SW、系统复位信号RESET均为高电平。
进一步地,所述看门狗逻辑电路包括第一与非门、第二与非门、第三与非门、第四与非门、第五与非门、第六与非门、第一或门、第二或门、第三或门、D触发器、第一数据选择器、第二数据选择器和反向器;
所述电源信号VCC1接入第一与非门的第一输入端,所述看门狗信号WD1接入第二与非门的第一输入端,第一与非门的输出端、第二与非门的输出端分别接第一或门的两个输入端;
所述复位脉冲信号RESET接第三与非门的第一输入端;
所述控制权强制转换信号SW接第四与非门的第一输入端;
所述电源信号VCC2接第五与非门的第一输入端,所述看门狗信号WD2接第六与非门的第一输入端,第五与非门的输出端、第六与非门的输出端分别接第三或门的两个输入端;
所述第一或门的输出端接第二或门的第一输入端,第二或门的输出端接D触发器的输入端,D触发器的控制端接高电平,D触发器的同向输出端接第二或门的第二输入端,D触发器的时钟端接分频后时钟计数信号,D触发器的反向输出端接第一数据选择器的第一输入端,第一数据选择器的第二输入端接地,第一数据选择器的触发端接所述第四与非门的输出端,第一数据选择器的输出端接第二数据选择器的第一输入端,第二数据选择器的第二输入端接高电平,第二数据选择器的触发端接第三或门的输出端,第二数据选择器的输出端输出所述1号计算机控制权信号R1以及通过反向器输出所述2号计算机控制权信号R2;
所述第一与非门、第一与非门、第三与非门、第四与非门、第五与非门、第六与非门的第二输入端均接高电平。
进一步地,所述看门狗选择电路包括第七与非门、第八与非门和第四或门;
1号计算机发送的开关量输出DO接第七与非门的第一输入端,计算机控制权信号R1接第七与非门的第二输入端;
2号计算机发送的开关量输出DO接第八与非门的第一输入端,计算机控制权信号R2接第八与非门的第二输入端;
第七与非门的输出端、第八与非门的输出端分别接第四或门的两个输入端,第四或门的输出端与执行元器件连接。
同时,本发明提供了一种火箭发动机试验双机实时控制切换方法,其特殊之处在于,采用上述火箭发动机试验双机实时控制系统,所述切换方法包括以下步骤:
1)1号计算机、2号计算机正常进入用户程序,默认1号计算机掌握控制权;
2)若看门狗信号WD1翻转或电源信号VCC1翻转或强制开关向看门狗逻辑电路发送控制权强制转换信号SW,控制权由1号计算机转换为2号计算机;
3)若复位开关向看门狗逻辑电路发送复位脉冲信号RESET,控制权从2号计算机切换至1号计算机;
4)掌握控制权的计算机控制信号输出至执行元器件,并接收执行元器件反馈的状态反馈信号。
进一步地,步骤2)中控制权由1号计算机转换为2号计算机的具体实现方式是:
设1号计算机获得控制权限时,看门狗逻辑电路输出高电平的控制权限信号R1和低电平的控制权限信号R2;在电路中实现控制权限信号R1和1号计算机的开关量输出信号DO分别为逻辑“与”的关系,控制权限信号R2和2号计算机机的开关量输出信号DO分别为逻辑“与”的关系,两组开关量信号在关系“与”之后实现逻辑“或”的关系。
与现有技术相比,本发明的优点是:
1、本发明双机实时控制系统及切换方法,采用2台计算机控制执行元器件的动作,其中一台计算机掌握控制权,在该台计算机出现故障时,自动切换为另一台计算机掌握控制权,避免单套控制计算机系统出现硬件异常时,导致控制任务失败的问题;以及晶振保证2台计算机时序的同步性。
2、本发明双机实时控制系统及切换方法满足试验台所有功能需求,测试所有故障状态均能正常切换,包括强制模式切换也能实现控制状态正常,实现了发动机试验的实时控制;在火箭发动机点火过程控制时,实现可靠控制任务和目标。
3、本发明双机实时控制系统简单可靠,可以推广应用在其它控制系统中。
附图说明
图1是本发明火箭发动机试验双机实时控制系统原理框图;
图2是本发明火箭发动机试验双机实时控制系统中看门狗逻辑电路原理框图;
图3是本发明火箭发动机试验双机实时控制系统中开关量输出信号原理框图;
图4是本发明火箭发动机试验双机实时控制系统中开关量输入信号原理框图;
其中,附图标记如下:
1-第一与非门,2-第二与非门,3-第三与非门,4-第四与非门,5-第五与非门,6-第六与非门,7-第一或门,8-第二或门,9-第三或门,10-D触发器,11-第一数据选择器,10-第二数据选择器,13-反向器,14-第七与非门,15-第八与非门,16-第四或门。
具体实施方式
以下结合附图和具体实施例对本发明的内容作进一步详细描述。
在火箭发动机试验台控制系统中,为了高可靠完成发动机试验的火工品、电磁阀、信号检测、系统测试、点火实验等相关功能,本发明采用双机实时备份控制方案。如图1所示,一种火箭发动机试验双机实时控制系统,包括1号计算机、2号计算机、看门狗切换电路、强制开关、复位开关和晶振;控制系统的关键部分为看门狗切换电路,该看门狗切换电路采用CPLD芯片开发设计,主要完成两套控制计算机的实时切换以及控制指令输出的选择及确定,看门狗切换电路包括看门狗逻辑电路和看门狗选择电路。
1号计算机和2号计算机为拥有相同配置的嵌入式计算机,作为开发平台;1号计算机向看门狗逻辑电路发送看门狗信号WD1和电源信号VCC1;2号计算机向看门狗逻辑电路发送看门狗信号WD2和电源信号VCC2。
初始阶段1号计算机和2号计算机都正常进入用户程序,双机切换时判定的转换条件有:1号计算机的看门狗信号WD1、2号计算机的看门狗信号WD2、1号计算机的电源信号VCC1、2号计算机的电源信号VCC2、强制切换信号SW,当以上的条件信号出现翻转时,可能是1号计算机的信号溢出也可能是2#计算机的信号溢出,或者人为强制的切换开关,都可以实现控制系统在1号计算机和2号计算机之间自动切换。具体为:当1号计算机的看门狗信号WD1溢出从低电平转换为高电平,控制权由1号计算机转换为2号计算机,2号计算机获得控制权就不再让出,除非复位开关给一个脉冲信号。当1号计算机的看门狗信号WD1正常,但是1号计算机突然掉电,1号计算机的电源信号VCC1从高电平转化为低电平时,也发生控制权的一次切换,即控制权由1号计算机转换为2号计算机,2号计算机获得控制权,同样不再让出,除非复位开关向看门狗逻辑电路发送一个复位脉冲信号RESET。强制切换信号SW发出的强制转换信号(SW是一个电平信号,高电平时发生切换)是人为强制将控制权从1号计算机切换到2号计算机。
如图2所示,看门狗逻辑电路包括第一与非门1(74LS00)、第二与非门2(74LS00)、第三与非门3(74LS00)、第四与非门4(74LS00)、第五与非门5(74LS00)、第六与非门6(74LS00)、第一或门7(74LS32)、第二或门8(74LS32)、第三或门9(74LS32)、D触发器10、第一数据选择器11(数据选择器21mux)、第二数据选择器12(数据选择器21mux)和反向器13(74LS04);电源信号VCC1接入第一与非门1的第一输入端,看门狗信号WD1接入第二与非门2的第一输入端,第一与非门1的输出端、第二与非门2的输出端分别接第一或门7的两个输入端;复位脉冲信号RESET接第三与非门3的第一输入端;控制权强制转换信号SW接第四与非门4的第一输入端;电源信号VCC2接第五与非门5的第一输入端,看门狗信号WD2接第六与非门6的第一输入端,第五与非门5的输出端、第六与非门6的输出端分别接第三或门9的两个输入端;第一或门7的输出端接第二或门8的第一输入端,第二或门8的输出端接D触发器10的输入端,D触发器10的控制端接高电平,D触发器10的同向输出端接第二或门8的第二输入端,D触发器10的时钟端接分频后时钟计数信号,D触发器10的反向输出端接第一数据选择器11的第一输入端,第一数据选择器11的第二输入端接地,第一数据选择器11的触发端接第四与非门4的输出端,第一数据选择器11的输出端接第二数据选择器12的第一输入端,第二数据选择器12的第二输入端接高电平,第二数据选择器12的触发端接第三或门9的输出端,第二数据选择器12的输出端输出1号计算机控制权信号R1以及通过反向器13输出2号计算机控制权信号R2;第一与非门1、第一与非门1、第三与非门3、第四与非门4、第五与非门5、第六与非门6的第二输入端均接高电平。
看门狗逻辑电路由MAXPLUS软件编写并下载至CPLD芯片,数据选择器21mux工作时,输出状态由触发端(“S”端)决定,当触发端(“S”端)为低电平“0”时,数据选择器21mux输出端(“Y”端)与第一输入端(“A”端)信号相同;当触发端(“S”端)为高电平“1”时,第一数据选择器11(数据选择器21mux)输出端(“Y”端)与第二输入端(“B”端)信号相同。图2中的时钟信号为晶振,分频后作为两套计算机基准定时器使用,实现两套控制计算机的同步性。
正常情况下,1号计算机的看门狗信号WD1、2号计算机的看门狗信号WD2均为高电平,1号计算机的电源信号VCC1、2号计算机的电源信号VCC2均为高电平。
以初始控制权由1号计算机控制为例:
当1号计算机的判定信号都正常时,D触发器10不会发生翻转,输出为初始状态高电平,第一数据选择器11的触发信号SW和2号计算机的条件都正常给第二数据选择器12,第二数据选择器12的触发信号为低电平,此时看门狗逻辑电路输出端为高电平,是1号计算机掌握控制权,即1号计算机控制权信号R1为高电平,2号计算机控制权信号R2为低电平。
当1号计算机的电源信号VCC1正常,看门狗信号WD1信号异常为低电平时,D触发器10输出发生翻转输出为低电平,此时数据选择器的触发信号不变,则输出端为低电平,因此2号计算机获得控制权限,即1号计算机控制权信号R1为低电平,2号计算机控制权信号R2为高电平。
当1号计算机的电源信号VCC1异常时,D触发器10输出发生翻转输出为低电平,此时数据选择器的触发信号不变,则输出端为低电平,因此2号计算机获得控制权限,即1号计算机控制权信号R1为低电平,2号计算机控制权信号R2为高电平。
当强制切换信号SW翻转时,数据选择器输出端切换为B端的低电平,此时控制权限直接交给2号计算机,即1号计算机控制权信号R1为低电平,2号计算机控制权信号R2为高电平。在获得控制权时,当复位信号RESET翻转时,触发器信号恢复初始输出值,控制权限又切换至1号计算机。
本实施例控制系统通过看门狗逻辑电路在出现异常情况时重新分配计算机主控权,在由2号计算机掌握主控权时,输出为2号计算机的指令。在2号计算机控制输出过程中,控制指令的主动权不会再自动转移到1号计算机,在1号计算机的异常情况处理完毕后,可以通过手动强制开关将控制命令的输出权限从2号计算机转移至1号计算机,也可以选择2号计算机一直在线控制。
控制权限在经过看门狗逻辑电路选择完成后,信号控制或者由1号计算机实现,或者由2号计算机实现,由于两套计算机共用外围设备及板卡,所以信号会经过看门狗选择电路部分实现。控制系统的信号分为开关量输出信号DO、开关量输入信号DI,其中DO信号是连接执行元器件的信号,控制计算机权限切换时受结果影响的就是DO信号,而DI信号主要是执行元器件运行结果的状态反馈,因此计算机控制权限的切换对DI信号没有影响。开关量输出信号、输入信号的选择电路逻辑关系如图3和图4所示。
图3中,看门狗选择电路包括第七与非门14、第八与非门15和第四或门16;1号计算机发送的开关量输出DO接第七与非门14的第一输入端,计算机控制权信号R1接第七与非门14的第二输入端;2号计算机发送的开关量输出DO接第八与非门15的第一输入端,计算机控制权信号R2接第八与非门15的第二输入端;第七与非门14的输出端、第八与非门15的输出端分别接第四或门16的两个输入端,第四或门16的输出端与执行元器件连接。开关量输出信号DO控制过程,1号计算机获得控制权限时,看门狗逻辑电路输出高电平的控制权限信号R1;2号计算机获得控制权限时,看门狗逻辑电路输出高电平的控制权限信号R2,在电路中实现控制权限信号R1和1号计算机的开关量输出信号DO分别为逻辑“与”的关系。同样,控制权限信号R2和2号计算机机的开关量输出信号DO分别为逻辑“与”的关系。两组开关量信号在关系“与”之后实现逻辑“或”的关系,因此可以保证不管是1号计算机输出,还是2号计算机输出,开关量通常都会保持一组稳定输出。
图4中,开关信号输入时共同采集一个反馈信号,在电路中通过逻辑“或”的关系,实现1号计算机、2号计算机的开关量输入信号DI的采集,此时过程与哪套设备在工作并无关系。
本实施例控制系统满足试验台所有功能需求,测试所有故障状态均能正常切换,包括强制模式切换也能实现控制状态正常,实现了发动机试验的实时控制。控制系统在火箭发动机点火过程控制时,实现可靠控制任务和目标。
以上仅是对本发明的优选实施方式进行了描述,并不将本发明的技术方案限制于此,本领域技术人员在本发明主要技术构思的基础上所作的任何公知变形都属于本发明所要保护的技术范畴。
- 火箭发动机试验双机实时控制系统及切换方法
- 火箭发动机试验双机实时控制系统及切换方法