一种掩膜版批量临时存储装置及掩膜版周转系统
文献发布时间:2023-06-19 11:03:41
技术领域
本发明属于掩膜版生产用设备领域,更具体的说涉及一种掩膜版批量临时存储装置及掩膜版周转系统。
背景技术
目前随着自动化的高度普及,掩膜版(玻璃材质)生产线也开始走向自动化、无人化,全程由自动化机器人进行掩膜版的搬运、传输。然而,在一连串的生产工序当中,部分工序完成一张掩膜版作业所需的时间很短,部分些工序完成一张掩膜版作业所需的时间相对较长,这样就会造成部分工序产品堆积。从目前来看,主要的工序时长瓶颈在清洗工序,清洗工序所需时间长(一张掩膜版大概需要3h左右),且一张掩膜版最少要清洗两次,有的更多,这样就会导致清洗工序产品堆积,从而造成前面工序的堵塞,浪费前面工序设备的机时。而且,遇上订单量大或有加急订单穿插进来,若堆积的产品没有处理完,后面的加急订单就无法进行,这样就会造成不能如期交货,给客户带来损失,给我司的形象带来不好的影响。
目前有两种方法可以解决这个问题:一是增加清洗机的数量,相对的成本增加;另外一种方法就是人工将堆积的产品取出,临时装盒子里,从而释放机时,同时也能为加急订单的生产“让路”,但是这种方法的缺点是人在抬掩膜版的过程中,会将其弄脏,增加清洗难度,而且有摔落的风险。
发明内容
本发明的目的在于提供一种掩膜版批量临时存储装置及掩膜版周转系统,具有能够自动存取掩膜版的临时存储装置,能够解决工序的产品堆积问题,同时也能避免对产品造成污染。
本发明技术方案一种掩膜版批量临时存储装置,包括横截面呈U型框状结构的存储架,所述存储架上呈上下位置设置有若干存储层,所述存储层包括分别设置在所述存储架两相对的内侧面上的固定导梁,两所述固定导梁上设置有移动架,所述移动架沿所述固定导梁轴线方向移动进出框状结构的存储架内部区域,所述移动架上设置有夹紧机构。
优选地,所述移动架包括分别设置在两所述固定导梁上且与固定导梁平行的移动梁,所述移动梁底部连接有第一螺杆机构,所述第一螺杆机构设置在所述固定导梁内并与带动所述移动梁沿所述固定导梁移动,实现所述夹紧机构进出框状结构的存储架内部区域。
优选地,所述夹紧机构包括夹具和夹具安装座,所述夹具安装座包括两断桥梁,两所述断桥梁相互平行设置且两端分别搭接在两移动梁上,两所述断桥梁底部连接有第二螺杆机构,所述第二螺杆机构设置在移动梁内并带动两断桥梁相对或向背运动,完成夹具尺寸调节。
优选地,所述断桥梁水平设置且轴线与所述移动梁轴线垂直,所述断桥梁包括两同轴设置的单梁,两单梁之间留有间距,所述夹具包括分别设置在各单梁上的一L型的支撑块。
优选地,四所述支撑块底部均连接有第三螺杆机构,所述第三螺杆机构分别设置在各单梁内并带动同一断桥梁上的两支撑块靠近或远离,完成夹具尺寸调节,四所述支撑块由掩膜版的四个顶角位置实现对掩膜版进行夹紧。
一种掩膜版周转系统,包括控制系统、中转装置、AGV和上述的存储装置,所述中转装置包括升降平台和设置在所述升降平台上的中转执行机构;所述控制系统控制升降平台分别适应存储装置上各存储层高度和AGV高度,中转执行机构实现掩膜版在AGV和存储层之间周转。
优选地,所述中转装置还包括固定架和呈竖直状态安装在所述固定架上升降机构,所述升降平台与所述升降机构顶部连接,所述升降机构通过所述升降平台带动安装在所述升降平台上的中转执行机构升降至适应存储层位置;
所述升降机构包括气缸、安装在气缸推杆顶部的过度平台和连接过度平台上表面与升降平台下表面的支撑立柱,所述支撑立柱设置不少于三根,且与升降平台中心轴线对称设置。
优选地,所述中转执行机构包括呈“十”字排列固定在所述升降平台上的四固定臂和分别设置在四所述固定臂内的中转夹紧机构,所述中转夹紧机构包括分别设置在四固定臂上的第四螺杆机构和分别与四所述第四螺杆机构连接的中转夹紧块,所述第四螺杆机构带动四所述中转夹紧块相向或相离运动,实现中转夹紧机构尺寸调节;
四所述中转夹紧块以升降平台的中轴线中心对称设置,四所述周转夹紧块由掩膜版的四边沿中心位置实现对掩膜版固定。
优选地,所述AGV上设置有周转执行机构,所述周转执行机构包括两平行设置的支撑臂组,两所述支撑臂组上分别设置有第五螺杆机构,所述第五螺杆机构带动两支撑臂组靠近或远离;所述支撑臂组包括呈上下位置设置的下支撑臂和上支撑臂,上支撑臂长度大于下支撑臂且设置有第六螺杆机构,所述下支撑臂和所述第六螺杆机构上均吊挂有一L型的周转夹紧块,同一支撑臂组上的两L型的周转夹紧块相对设置,第六螺杆机构实现同一支撑臂组上的的周转夹紧块相对靠近过远离,两支撑臂组上的四周转夹紧块由掩膜版的四个顶角位置实现对掩膜版夹紧。
本发明技术方案一种掩膜版批量临时存储装置的有益效果是:
1、采用具有多层存储层的存储装置,能够对不能进行立即加工处理的掩膜版进行暂时存储,为掩膜版提供一个暂放区域,确保在周转中,掩膜版能够进行良好的处理,避免掩膜版被污染等。
2、存储层上存储移动机构的设置,使得存储夹紧机构进出储存架,便于对存储层内掩膜版的拿出或将掩膜版房子在存储层上,操作方便快捷。
本发明技术方案一种掩膜版周转系统的有益效果是:很好的解决了掩膜版在生产中各个工序加工时长不一致导致的掩膜版暂时堆积存放的问题,避免了掩膜版在各个工序之间周转出现的污染问题。
附图说明
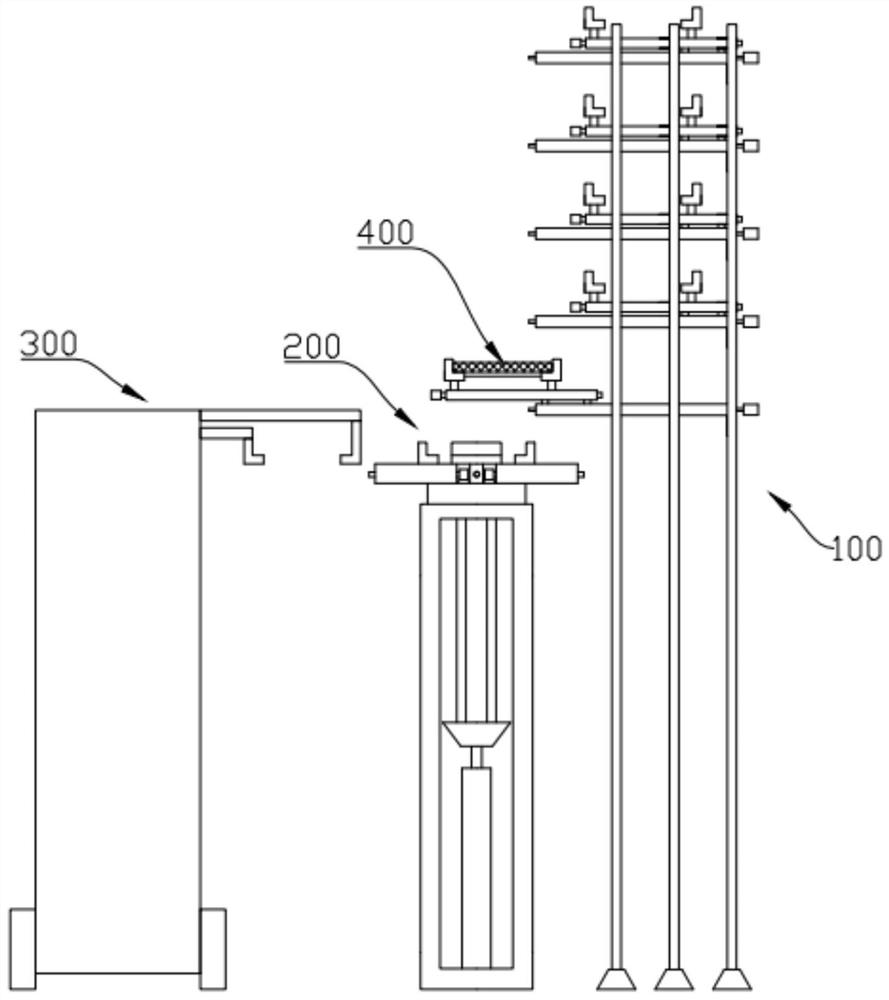
图1本发明技术方案一种掩膜版批量临时存储装置结构示意图,
图2为图1局部放大图,
图3为图1的俯视图,
图4为掩膜版周转系统结构示意图,
图5为中转装置结构示意图,
图6为AGV上设置的周转执行机构俯视图,
图7为图6的右视图。
具体实施方式
为便于本领域技术人员理解本发明技术方案,现结合说明书附图对本发明技术方案做进一步的说明。
如图1、图2和图3所示,本发明技术方案一种掩膜版批量临时存储装置,存储装置100包括横截面呈U型框状结构的存储架10,存储架10上呈上下位置设置有若干存储层11。存储层11包括分别设置在存储架10两相对的内侧面上的固定导梁12,两固定导梁12上设置有移动架。移动架沿固定导梁12轴线方向移动进出框状结构的存储架10内部区域,移动架上设置有夹紧机构。
基于上述技术方案,在周转时,需要将掩膜版400放置上存储层11或将掩膜版由存储层11上取下,在这个过程中,移动架均需要移出存储架10的U型架体围城的区域内,这样一方面便于掩膜版400进行拿取或放置,操作方便,另一方面不会对其他存储层的掩膜版造成影响或磕碰。
如图2所示,移动架包括分别设置在两固定导梁12上且与固定导梁12平行的移动梁13。移动梁13底部连接有第一螺杆机构121,第一螺杆机构121设置在固定导梁12内并与带动移动梁13沿固定导梁12移动,实现夹紧机构进出框状结构的存储架10的U型框状结构的内部区域。如图2所示,第一螺杆机构121包括设置在固定导梁12内且与固定导梁平行的螺杆和导杆,螺杆一端连接伺服电机,由伺服电机带动螺杆旋转,实现与螺杆连接的移动梁13的移动。为确保移动梁12能够带动移动架移出存储架10的内部区域,在移动梁13底部设置与螺杆和导杆套接的连接块132,连接块132在保证移动梁13平衡的前提下尽量向靠近移动梁13的内端设置,确保移动架和夹紧机构能够完全移出存储架10的内部区域,便于对夹紧机构上的掩膜版的操作或将掩膜版放置在夹紧机构上。
为确保在对掩膜版进行周转,避免在周转时移动架与中转装置200发生干涉,两移动梁13之间距离必须大于中转装置200上中转执行机构上呈“十”字排列固定的两固定臂211的长度之和。
如图2所示,夹紧机构包括夹具15和夹具安装座,夹具安装座包括两断桥梁14,两断桥梁14相互平行设置且两端分别搭接在两移动梁13上。两断桥梁14底部连接有第二螺杆机构131,第二螺杆机构131设置在移动梁13内并带动两断桥梁14相对或向背运动,完成夹具尺寸调节。
如图2所示,断桥梁14水平设置且轴线与移动梁13轴线垂直,断桥梁14包括两同轴设置的单梁141/142,两单梁141/142之间留有间距,夹具15包括分别设置在各单梁上的一L型的支撑块。第二螺杆机构131包括分别设置在两移动梁13内的螺杆,螺杆端部连接伺服电机,设置在两移动梁13内的螺杆上由中部向两端分别设置有旋向相反的螺纹,螺杆旋转,旋向相反的两螺纹带动两断桥梁14相向或相离移动,实现夹具尺寸在一个方向上的调节。
如图2所示,四支撑块底部均连接有第三螺杆机构143,第三螺杆机构143分别设置在各单梁内并带动同一断桥梁14上的两支撑块靠近或远离,完成夹具尺寸调节,四支撑块由掩膜版400的四个顶角位置实现对掩膜版进行夹紧。第三螺杆机构143包括设置在各个单梁内的螺杆和伺服电机,伺服电机与螺杆带动支撑块沿单梁移动,实现同一断桥梁14上的两支撑块靠近或远离,实现适应不同尺寸的掩膜版400的存储。
如图4所示,一种掩膜版周转系统,包括控制系统、中转装置200、AGV300和前述的存储装置100。如图5所示,中转装置200包括升降平台20和设置在升降平台20上的中转执行机构21。控制系统控制升降平台20分别适应存储装置100上各存储层11高度和AGV300高度,中转执行机构21实现掩膜版400在AGV和存储层11之间周转。
如图5所示,中转装置200还包括固定架22和呈竖直状态安装在固定架22上升降机构23。升降平台20与升降机构23顶部连接,升降机构23通过升降平台20带动安装在升降平台20上的中转执行机构21升降至适应存储层11位置。升降机构23包括气缸231、安装在气缸推杆顶部的过度平台232和连接过度平台232上表面与升降平台20下表面的支撑立柱233,支撑立柱233设置不少于三根,且与升降平台20中心轴线对称设置。过度平台232和支撑立柱233的设置,确保升降平台20平稳升降。
如图5所示,中转执行机构21包括呈“十”字排列固定在升降平台20上的四固定臂211和分别设置在四固定臂211内的中转夹紧机构,中转夹紧机构包括分别设置在四固定臂211上的第四螺杆机构212和分别与四第四螺杆机构212连接的中转夹紧块213。第四螺杆机构212带动四中转夹紧块213相向或相离运动,实现中转夹紧机构尺寸调节。四中转夹紧块213以升降平台20的中轴线中心对称设置,四周转夹紧块213由掩膜版400的四边沿中心位置实现对掩膜版固定。周转夹紧块213位置的设置有效的避免了与存储装置100上夹具15的干涉。
如图6和图7所示,AGV上设置有周转执行机构,周转执行机构包括两平行设置的支撑臂组31,两支撑臂组31上分别设置有第五螺杆机构32。第五螺杆机构32带动两支撑臂组31靠近或远离。支撑臂组31包括呈上下位置设置的下支撑臂312和上支撑臂311,上支撑臂311长度大于下支撑臂312且设置有第六螺杆机构314,下支撑臂311和第六螺杆机构314均吊挂有一L型的周转夹紧块313。同一支撑臂组31上的两L型的周转夹紧块313相对设置,第六螺杆机构314实现同一支撑臂组31上的的周转夹紧块相对靠近过远离,两支撑臂组31上的四周转夹紧块由掩膜版的四个顶角位置实现对掩膜版夹紧。两支撑臂组31和下支撑臂312与上支撑臂311结构的设计,避免了掩膜版周转时与中转装置200上的中转执行机构21发生干涉。
基于上述技术方案,本发明技术方案掩膜版周转系统的放版工作过程为:
首先AGV准备,由上一个工序位置将掩膜版接收过来;然后,存储装置100和中转装置200接收到控制系统和AGV的信号,存储装置100和中转装置200上的夹具15和中转执行机构21根据要放置的掩膜版400的尺寸调整好尺寸和位置,且中转装置200的高度首先调整至与AGV高度相适应状态;然后中转装置200将准备好的信息反馈给AGV,AGV运动,将掩膜版放置在中转装置200的中转执行机构21上;然后AGV移动离开回到待机位置并将信号反馈给中转装置200和存储装置100;再后,中转装置200上升至存储装置100上需要存在的指定存储层11位置,且处于存储层111高度位置的上部位置,完成后将信息反馈给存储装置100;再后,存储装置100的移动架向外移出,移出至指定位置,移动架上夹具15的中轴线与掩膜版400中轴线重合,中转装置200的中转执行机构21下降,掩膜版被转移至存储装置100的夹具15上,然后中转装置200的中转执行机构21下降回位至待机为,存储装置100上的移动梁13带动掩膜版回缩至存储层即可。本发明技术方案掩膜版周转系统的取版工作过程与放版过程操作相反即可。
本发明技术方案在上面结合附图对发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性改进,或未经改进将发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
- 一种掩膜版批量临时存储装置及掩膜版周转系统
- 一种掩膜版批量临时存储装置及掩膜版周转系统