基于超声波雷达的靶标探测法及其装置
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及到一种基于超声波雷达的探测方法及其装置,应用于“存在探测”领域。
背景技术
超声波雷达已在各行业使用多年,按用途主要分为两种:距离探测和存在探测。
距离探测举例:倒车雷达、料位探测、液位探测等。存在探测举例:车位检测、来人警示、闸机开关控制等。
超声波雷达的工作原理:
如图1,超声波雷达探测原理示意图。
超声波雷达发射超声波后即进入接收状态,超声波在传播时如果遇到障碍物会发生反射,所反射的超声波称为“回波”。超声波雷达接收到回波后,依据超声波的发射时间与接收到回波的时间之差△t,再由公式:s=v*△t/2(s表示障碍物的距离,v表示声速,△t表示超声波的发射时间与接收到回波的时间之差),即可计算出障碍物的距离。
超声波雷达在实际应用中,其探测可靠性仍显不足,主要表现为“探测失效”,经分析,其失效原因有以下两种情形:
1.当被探测物体为光滑平面,且该反射面与超声波的传播方向不垂直时,超声波雷达将收不到反射回波。如图2:被探测物为光滑平面时超声波雷达探测失效示意图。
2.当被探测物体表面采用吸波材料时,例如:棉质材料、或其他多孔吸声材料,超声波雷达所发射的超声波被所探测物体表面完全吸收,很明显,此种情形超声波雷达也收不到回波。
本发明提供了一种基于超声波雷达的探测方法和装置,可解决上述问题。
发明内容
本发明的目的是提供一种基于超声波雷达的靶标探测法及其装置,以解决超声波雷达的“探测失效”问题。
本发明采用的技术方案是:
一种基于超声波雷达的靶标探测法及其装置,其特征在于,所述的靶标探测法包括以下步骤:
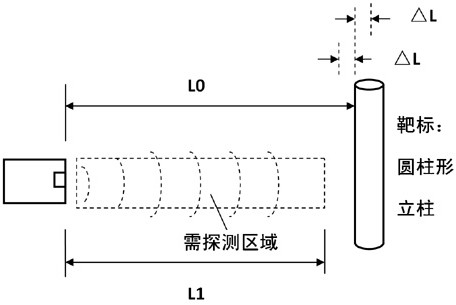
(1)在超声波雷达的正前方“需探测区域”之外(越过需探测区域),选定或装设一个物体作为“靶标”;
(2)调整超声波雷达的安装角度,使其收发传感器正对步骤(1)中所述的靶标,启动超声波雷达的“初始靶标探测”功能,探测到靶标后的输出信息在超声波雷达上用“声光显示或提示”,其输出信息中包含靶标距离的初始探测值L0;
(3)在超声波雷达中确认并保存步骤(2)中靶标距离的初始探测值L0;
(4)超声波雷达于“存在探测”工作中的算法为:
相关定义:
L0为超声波雷达探测靶标距离的初始探测值;
△L为超声波雷达探测靶标距离的最大偏移量;
L1为需探测区域与超声波雷达的最大距离值,且L1 L为超声波雷达探测输出距离变量; 判“物体存在”的算法有(a)、(b)两种: (a)超声波雷达的探测输出距离值L≦L1; (b)不满足算法(a)的条件,且超声波雷达的探测输出距离值L不在L0-△L≦L≦L0+△L所表示的范围内; 判“物体不存在”的算法: (c)超声波雷达的探测输出距离值L在L0-△L≦L≦L0+△L所表示的范围内。 本发明步骤(2)中所述的“探测到靶标后的输出信息”中包含靶标的回波信号幅度值。 本发明步骤(4)中所述的算法(a)、算法(b)、算法(c),分别增加“探测次数参数”m1、m2、m3(m1、m2、m3均为正整数),当某算法的条件满足后,还需累积计算该算法已完成的探测次数,当达到所设定的探测次数(m1次、m2次、m3次)时,超声波雷达再作出“物体存在与否”的判断。 本发明所述的超声波雷达采用窄波束定向型超声波雷达,其超声波束的发射角度小于30度。 本发明所述的靶标采用圆柱形立柱。 本发明所述的圆柱形立柱,采用车辆导流柱或防撞柱。 本发明和背景技术相比,提高了超声波雷达探测的准确性和可靠性。 附图说明 图1:超声波雷达探测原理示意图。 图2:被探测物为光滑平面时超声波雷达探测失效示意图。 图3:设有“靶标”的超声波雷达工作示意图。 图4:设有“靶标”无探测回波超声波雷达工作示意图。 图5:“靶标”反射面为光滑柱面时的回波示意图。 具体实施方式 本发明的目的是解决超声波雷达在“存在探测”中的失效问题,其失效时的故障现象为:在需探测区域有障碍物,而超声波雷达无输出。 图2:被探测物为光滑平面时超声波雷达探测失效示意图。 如图2所示:在超声波雷达的需探测区域内,有一倾斜且光滑的平面障碍物,超声波雷达所发射的超声波,完全被该光滑平面反射至其他方向,超声波雷达接收不到反射回波。当超声波雷达接收不到反射回波时,显然会判定在需探测区域无障碍物,不会输出“存在信号”。这是超声波雷达探测失效的情形之一。 (注)超声波具有直线传播的特点,当超声波遇到光滑平面时,超声波的反射特性类似于光的反射特性,其“反射角”等于“入射角”,如图2:∠1=∠2。 另外一种探测失效的情形:当被探测物体的表面采用吸声材料时,超声波雷达也会接收不到探测回波。 于自动化控制设备中使用超声波雷达时,如果在“需探测区域”有障碍物,而超声波雷达出现探测失效,有可能带来危险。例如,在道闸设备中装设超声波雷达用以控制自动关闸,如果车辆还未开走,超声波雷达就判定“无车”,必然造成砸车事故。 为此,本发明采用了具有较高安全性的技术方案。 如图3所示:设有“靶标”的超声波雷达工作示意图。 超声波雷达:采用窄波束定向型超声波雷达,其超声波束的发射角度小于30度。 需探测区域:图中的虚线框内即为“需探测区域”,位于超声波雷达的正前方。 靶标的位置与装设:在超声波雷达正前方的“需探测区域”之外,越过“需探测区域”,选定或装设一个物体作为“靶标”。图3所示的“靶标”采用的是一根竖直装设的圆柱形立柱,立柱的顶端高度大于雷达的安装高度。 相关变量定义: L0为超声波雷达探测靶标距离的初始探测值; △L为超声波雷达探测靶标距离的最大偏移量; L1为需探测区域与超声波雷达的最大距离值,在选定或装设靶标时即有关系式:L1 L为超声波雷达探测输出距离变量。 采用靶标探测法的工作步骤为: (1)在超声波雷达的正前方“需探测区域”之外(越过需探测区域),选定或装设一个物体作为“靶标”; (2)调整超声波雷达的安装角度,使其收发传感器正对步骤(1)中所述的靶标,启动超声波雷达的“初始靶标探测”功能,探测到靶标后的输出信息在超声波雷达上用“声光显示或提示”,其输出信息中包含靶标距离的初始探测值L0以及靶标的回波信号幅度值; (3)依据靶标的回波信号幅度值和靶标的距离值,精细调整超声波雷达的安装角度以及靶标的安装位置,使靶标的回波信号幅度值最大; (4)在超声波雷达中确认并保存步骤(2)中靶标距离的初始探测值L0; (5)超声波雷达于“存在探测”工作中的算法为: 判“物体存在”的算法有(a)、(b)两种: (a)超声波雷达的探测输出距离值L≦L1; (b)不满足算法(a)的条件,且超声波雷达的探测输出距离值L不在L0-△L≦L≦L0+△L所表示的范围内; 判“物体不存在”的算法仅有一种: (c)超声波雷达的探测输出距离值L在L0-△L≦L≦L0+△L所表示的范围内; (6)上述步骤(5)中所述的算法(a)、算法(b)、算法(c),分别增加“探测次数参数”m1、m2、m3(m1、m2、m3均为正整数),当某算法的条件满足后,还需累积计算该算法已完成的探测次数,当达到所设定的探测次数(m1次、m2次、m3次)时,超声波雷达再作出“物体存在与否”的判断。 为便于理解,把上述靶标探测法的各步骤概括如下: 步骤(1)可概述为“装设靶标”; 步骤(2)可概述为“探测靶标”; 步骤(3)可概述为“对准靶标”; 步骤(4)可概述为“保存靶标”; 步骤(5)(6)为超声波雷达于“存在探测”工作中的具体算法,可概述为“使用靶标”。 关于步骤(5)的算法说明: 对“物体不存在”的判断,实际上必须满足两个条件: 其一,在需探测区域内没有探测到物体,探测输出距离值不满足L≦L1,也即非算法(a),否则会判“物体存在”; 其二,必须探测到靶标,即满足算法(c)。 算法(c):超声波雷达探测靶标距离的最大偏移量△L通常较小,超声波雷达一般都能达到误差小于2%的探测精度,如果超声波雷达的探测输出距离值L在L0-△L≦L≦L0+△L所表示的“较小区间”内,可断定该距离值属于靶标,也即在超声波雷达与靶标之间已没有物体所阻挡,故判“物体不存在”。 对“物体存在”的判断,有(a)、(b)两种算法,两者有区别。 算法(a): 超声波雷达的探测输出距离值L≦L1,也即在“需探测区域”有真实的探测距离输出,说明雷达已探测到了“有效的”障碍物,其“物体存在”的可信度较高。 算法(b): 不满足算法(a)的条件,且超声波雷达的探测输出距离值L不在L0-△L≦L≦L0+△L所表示的范围内。换言之,即没有在“需探测区域”探测到“有效的”障碍物,也没有探测到靶标——即非算法(a),也非算法(c)。 经分析,超声波雷达的探测距离值满足算法(b)时,可能存在以下两种可能: 其一是在需探测区域有真实的物体存在,靶标被阻挡,超声波雷达即没有收到障碍物的有效回波,也没有收到靶标的有效回波。如图4所示:设有“靶标”无探测回波超声波雷达工作示意图,超声波束在需探测区域被光滑且倾斜的平面阻挡,回波被反射至其他方向。 其二是在需探测区域没有物体存在,靶标没有被阻挡,但超声波雷达却没有收到靶标的有效回波,原因可能是雷达的信号通路故障,也可能是气流扰动等其他原因。 显然,用算法(b)判断“物体存在”的可信度要比算法(a)低,在实际应用中,可根据需要选择算法。当超声波雷达于安全性要求较高的场合中应用时,其探测输出距离值满足算法(a)或算法(b)都应判“物体存在”。 关于步骤(6)的算法说明: 在步骤(6)中,给各算法(a)、(b)、(c)分别增加了“探测次数参数”m1、m2、m3,实际上可理解为一种“重复多次”的确认过程,例如:用算法(a)判物体存在时,如果设探测次数参数m1≧2,则仅当超声波雷达在需探测区域重复探测到障碍物的次数大于等于2后,才判物体存在,这样可以滤除干扰信号,以防止误判。另外两种算法(b)、(c)分别增加探测次数参数m2、m3后,其作用完全相同,不再赘述。 靶标的选取或装设: 由靶标法的探测原理可知,对于“靶标”的材质或形状没有特别要求,只需该靶标能被超声波雷达准确地探测到即可。 靶标可以使用现场已存在的障碍物,如树干、栏杆、墙壁等物,也可以另外加装一个物体。 使用“光滑平面”作为靶标的反射面时,需要调校该平面使之“正对”超声波雷达,使用不方便。正对调校的原因为:如果靶标的光滑平面不正对超声波雷达,可能会发生如图2所示的反射,导致接收不到靶标回波。 靶标采用圆柱形立柱时,超声波反射面为其柱面,如图5:“靶标”反射面为光滑柱面时的回波示意图。此时,只需把超声波雷达的收发传感器对准该立柱,并上下调整雷达的仰角后,一定存在着“可接收的回波”w0。 由图5还可看出,所述的“圆柱形立柱”不一定要求有“完整的柱面”,也可以是部分柱面,如:1/4柱面。 关于圆柱形立柱的直径大小: 当靶标采用圆柱形立柱时,其直径没有上限要求,但如果直径选择太小有可能使回波信号太弱。一般地,当靶标与超声波雷达的距离大于6米时,所选择的立柱直径应不小于3英寸。 本发明应用示例: 超声波雷达采用窄波束定向型10米量程的远程超声波雷达; 靶标采用圆柱形车辆防撞柱(直径4英寸),竖直高度选为1米; 超声波雷达装设于车道一侧,高度为0.7米,并使其收发传感器水平正对路面; 圆柱形车辆防撞柱竖直装设于马路对面距超声波雷达6米处,并使其位于超声波雷达的正前方; 需探测区域为位于超声波雷达和圆柱形车辆防撞柱之间的一段马路。 经实测,使用本发明所述的靶标探测法后,超声波雷达可以准确无误地探测到所有的过往车辆,达到了稳定、可靠的探测目的。
- 基于超声波雷达的靶标探测法及其装置
- 一种基于超声波雷达的探测方法、装置和车辆